
一种同步扰码的盲识别方法.pdf

一吃****成益

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种同步扰码的盲识别方法.pdf
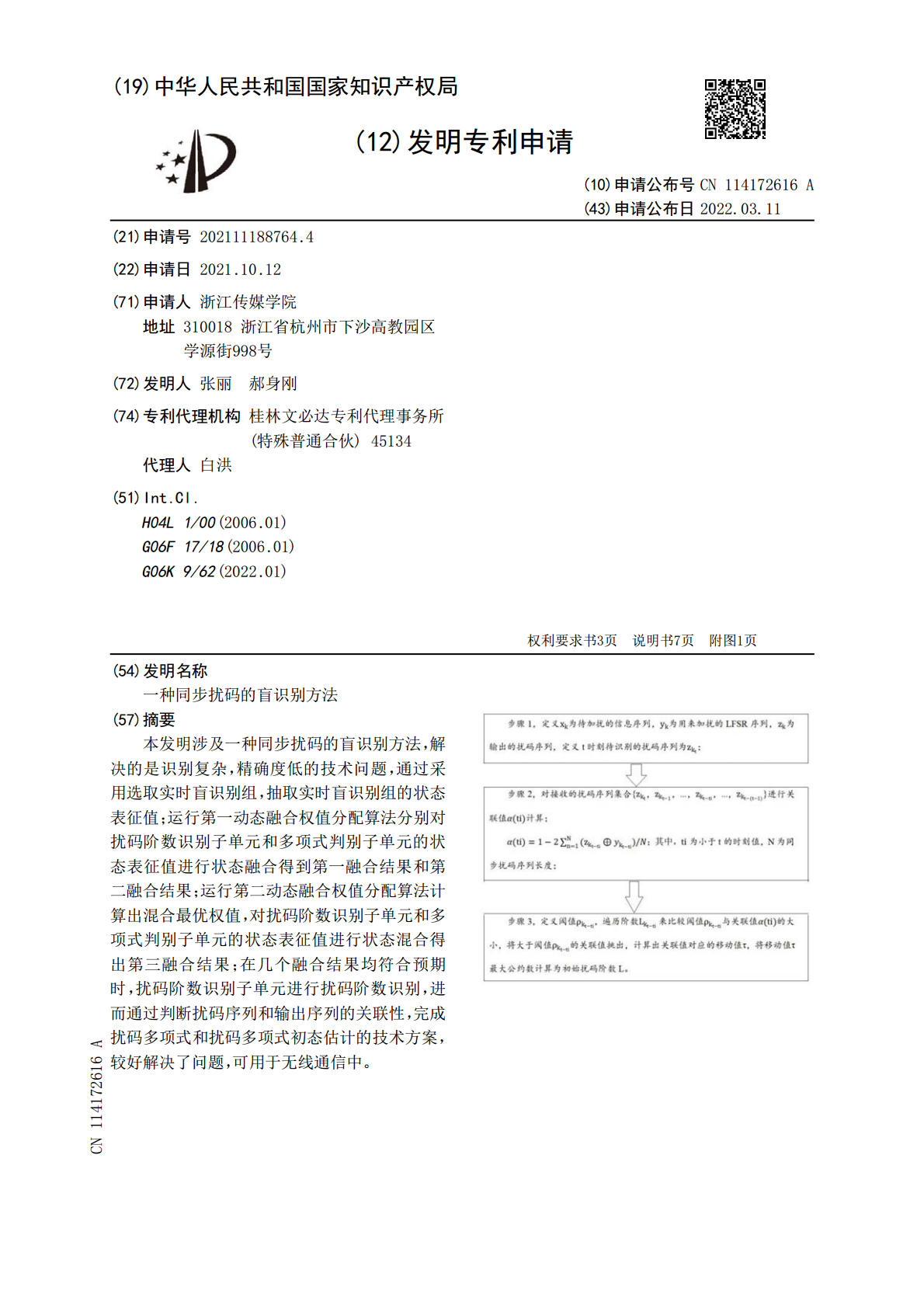
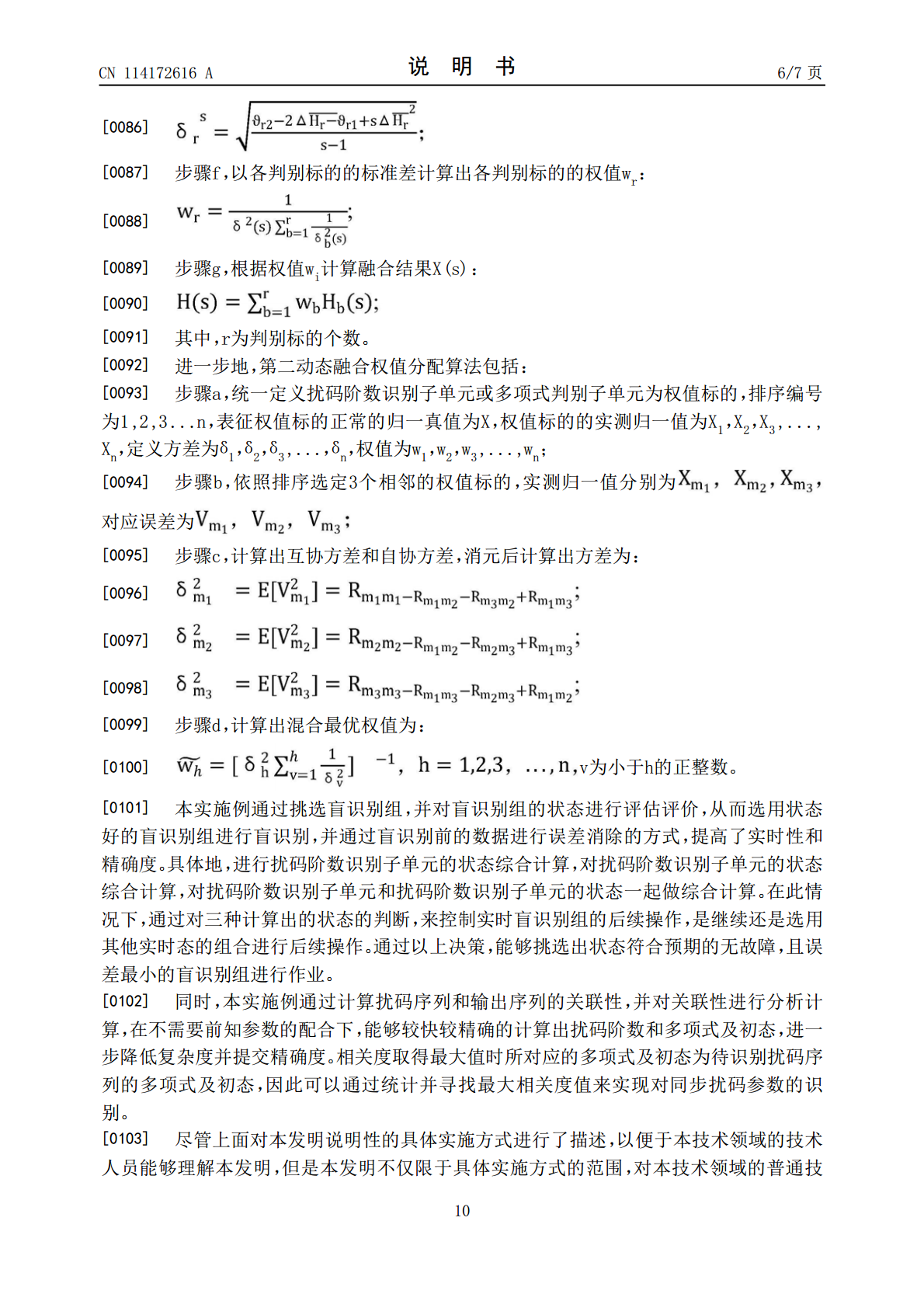
本发明涉及一种同步扰码的盲识别方法,解决的是识别复杂,精确度低的技术问题,通过采用选取实时盲识别组,抽取实时盲识别组的状态表征值;运行第一动态融合权值分配算法分别对扰码阶数识别子单元和多项式判别子单元的状态表征值进行状态融合得到第一融合结果和第二融合结果;运行第二动态融合权值分配算法计算出混合最优权值,对扰码阶数识别子单元和多项式判别子单元的状态表征值进行状态混合得出第三融合结果;在几个融合结果均符合预期时,扰码阶数识别子单元进行扰码阶数识别,进而通过判断扰码序列和输出序列的关联性,完成扰码多项式和扰码多
基于码重分布的自同步扰码盲识别方法.pdf
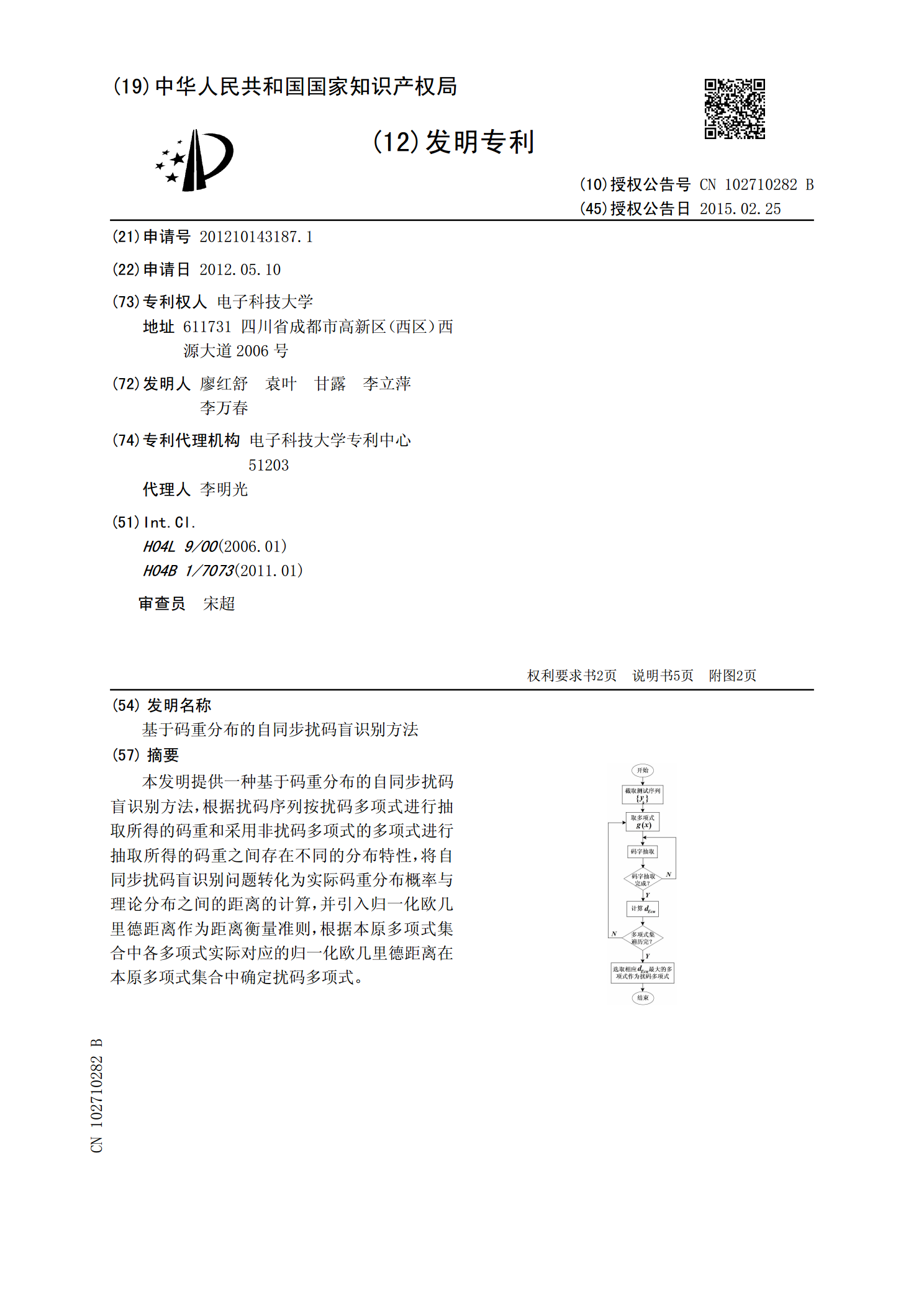
本发明提供一种基于码重分布的自同步扰码盲识别方法,根据扰码序列按扰码多项式进行抽取所得的码重和采用非扰码多项式的多项式进行抽取所得的码重之间存在不同的分布特性,将自同步扰码盲识别问题转化为实际码重分布概率与理论分布之间的距离的计算,并引入归一化欧几里德距离作为距离衡量准则,根据本原多项式集合中各多项式实际对应的归一化欧几里德距离在本原多项式集合中确定扰码多项式。
一种自同步扰码生成多项式的盲识别方法.pdf
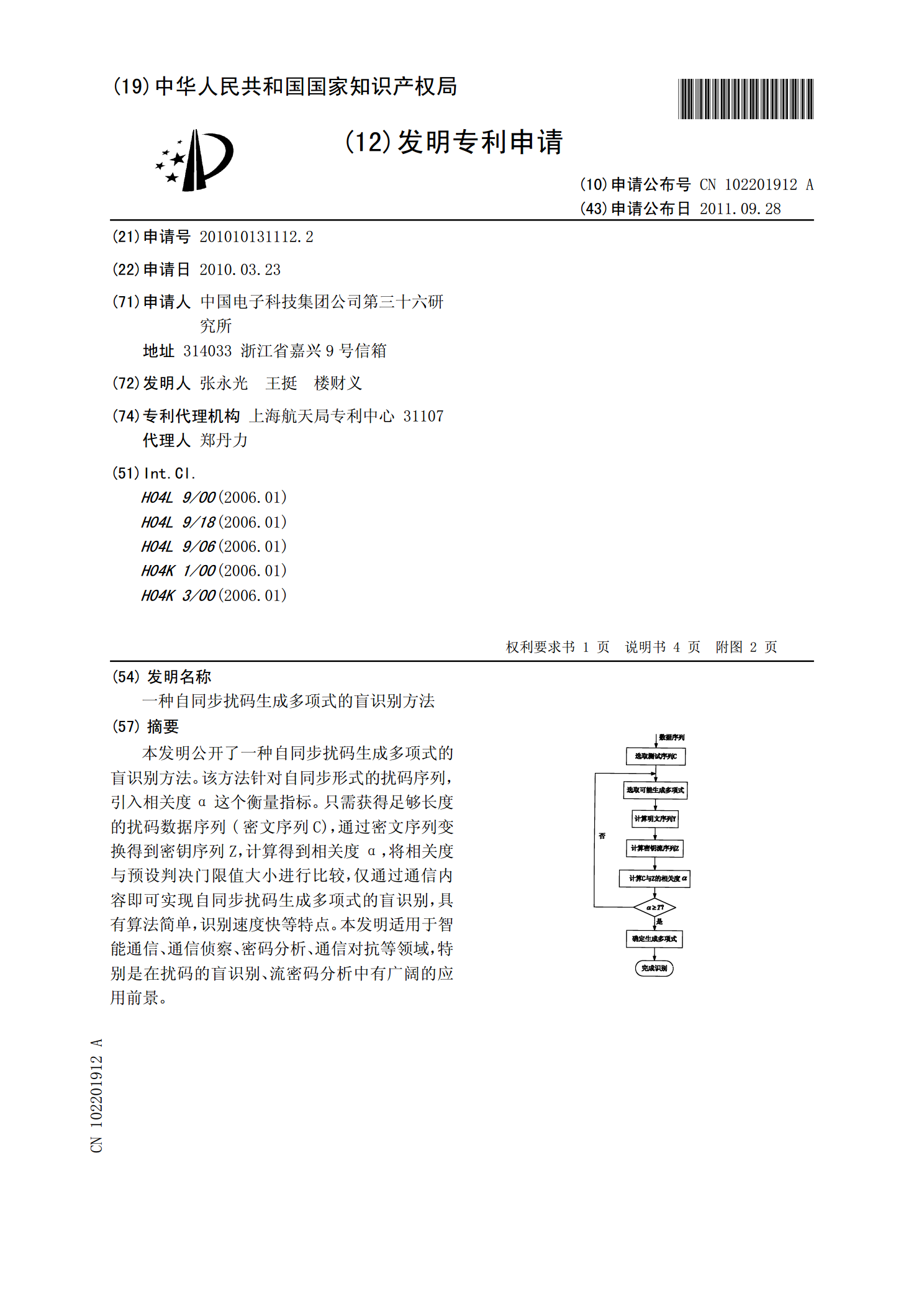
本发明公开了一种自同步扰码生成多项式的盲识别方法。该方法针对自同步形式的扰码序列,引入相关度α这个衡量指标。只需获得足够长度的扰码数据序列(密文序列C),通过密文序列变换得到密钥序列Z,计算得到相关度α,将相关度与预设判决门限值大小进行比较,仅通过通信内容即可实现自同步扰码生成多项式的盲识别,具有算法简单,识别速度快等特点。本发明适用于智能通信、通信侦察、密码分析、通信对抗等领域,特别是在扰码的盲识别、流密码分析中有广阔的应用前景。
基于自相关函数的自同步扰码生成多项式的盲识别方法.pdf
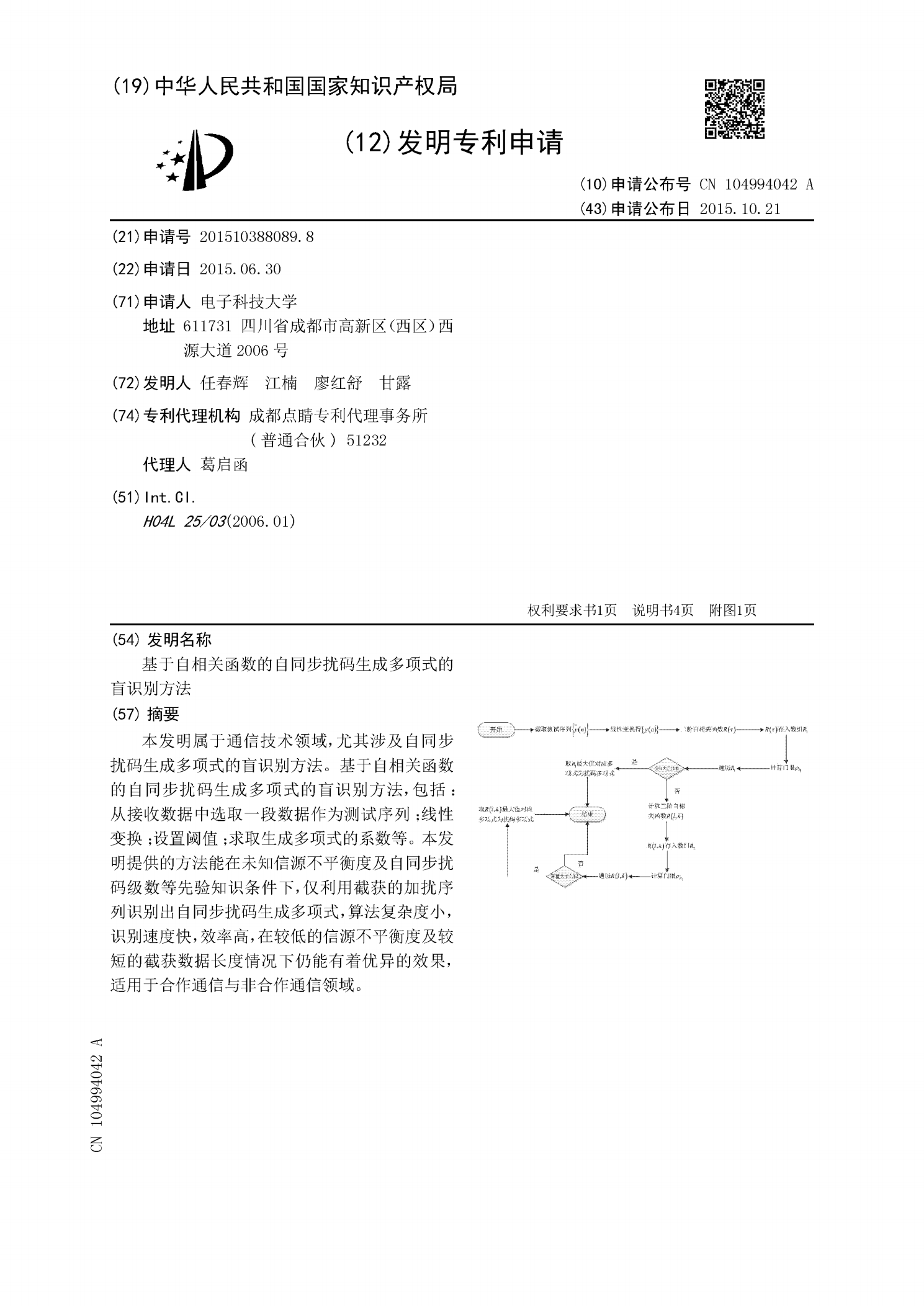
本发明属于通信技术领域,尤其涉及自同步扰码生成多项式的盲识别方法。基于自相关函数的自同步扰码生成多项式的盲识别方法,包括:从接收数据中选取一段数据作为测试序列;线性变换;设置阈值;求取生成多项式的系数等。本发明提供的方法能在未知信源不平衡度及自同步扰码级数等先验知识条件下,仅利用截获的加扰序列识别出自同步扰码生成多项式,算法复杂度小,识别速度快,效率高,在较低的信源不平衡度及较短的截获数据长度情况下仍能有着优异的效果,适用于合作通信与非合作通信领域。
一种卷积码盲识别方法.pdf
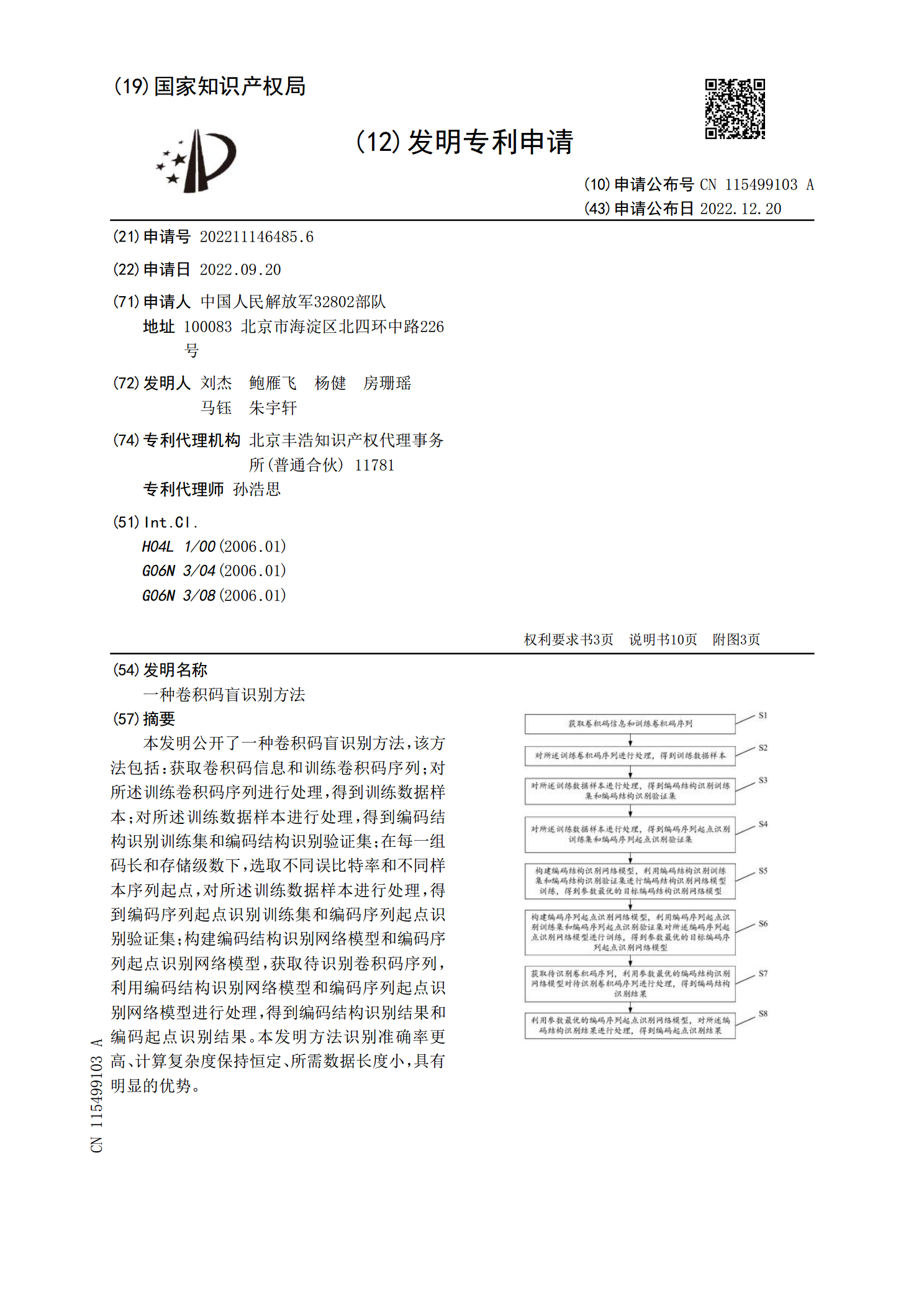
本发明公开了一种卷积码盲识别方法,该方法包括:获取卷积码信息和训练卷积码序列;对所述训练卷积码序列进行处理,得到训练数据样本;对所述训练数据样本进行处理,得到编码结构识别训练集和编码结构识别验证集;在每一组码长和存储级数下,选取不同误比特率和不同样本序列起点,对所述训练数据样本进行处理,得到编码序列起点识别训练集和编码序列起点识别验证集;构建编码结构识别网络模型和编码序列起点识别网络模型,获取待识别卷积码序列,利用编码结构识别网络模型和编码序列起点识别网络模型进行处理,得到编码结构识别结果和编码起点识别结