
内河盲区北斗航道智能预判方法.pdf

邻家****mk


1/10
2/10
3/10

4/10

5/10

6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
内河盲区北斗航道智能预判方法.pdf
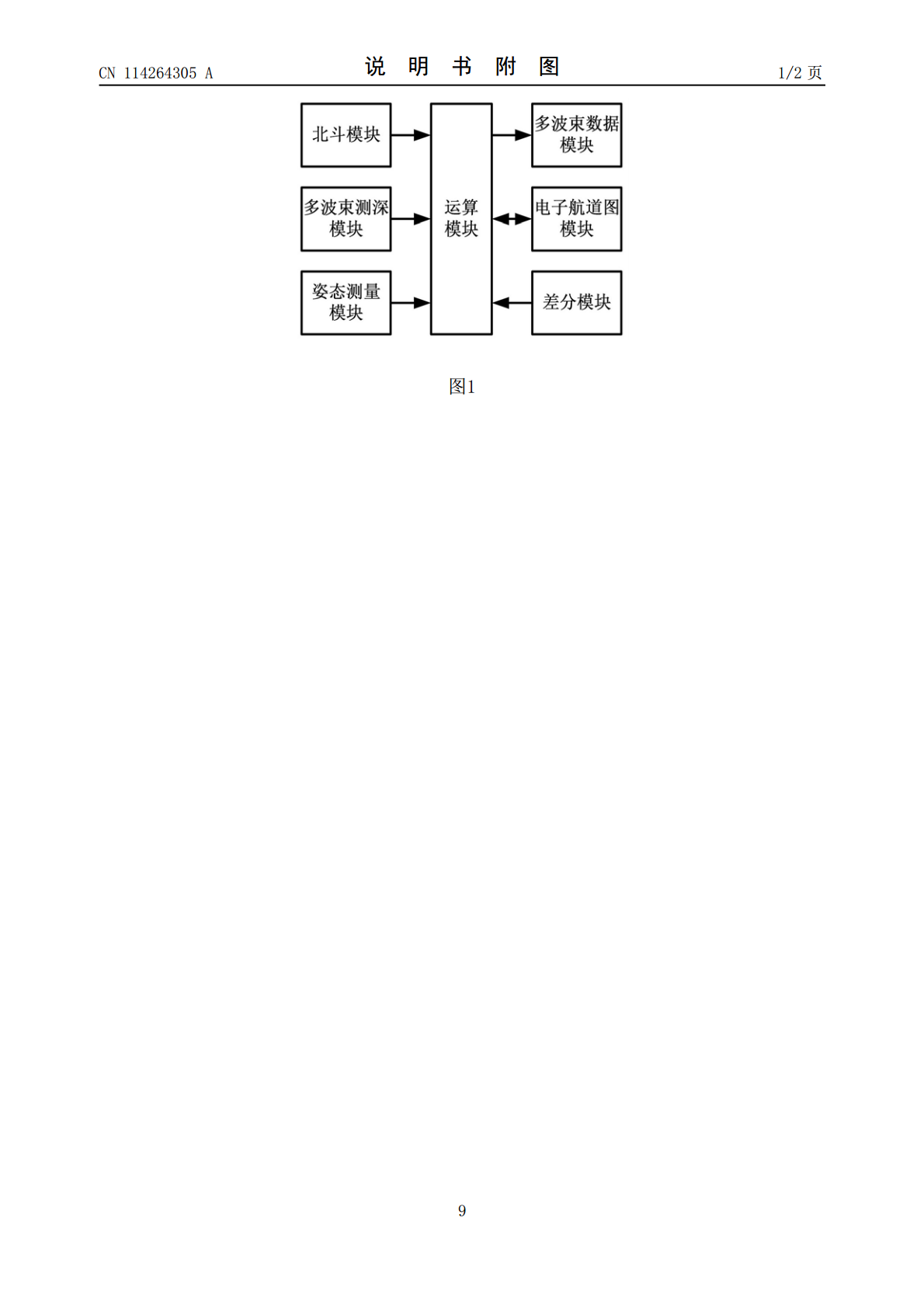
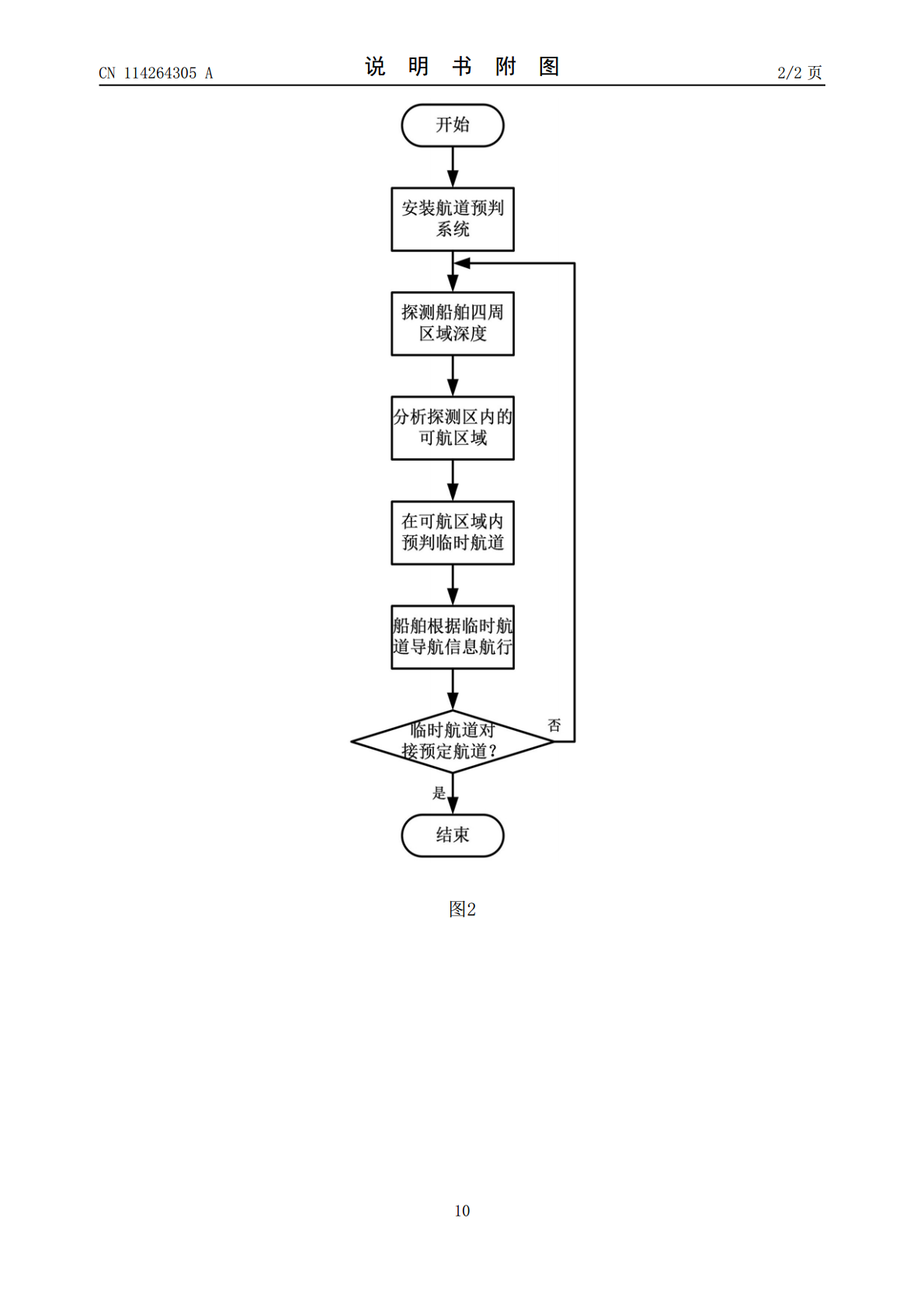
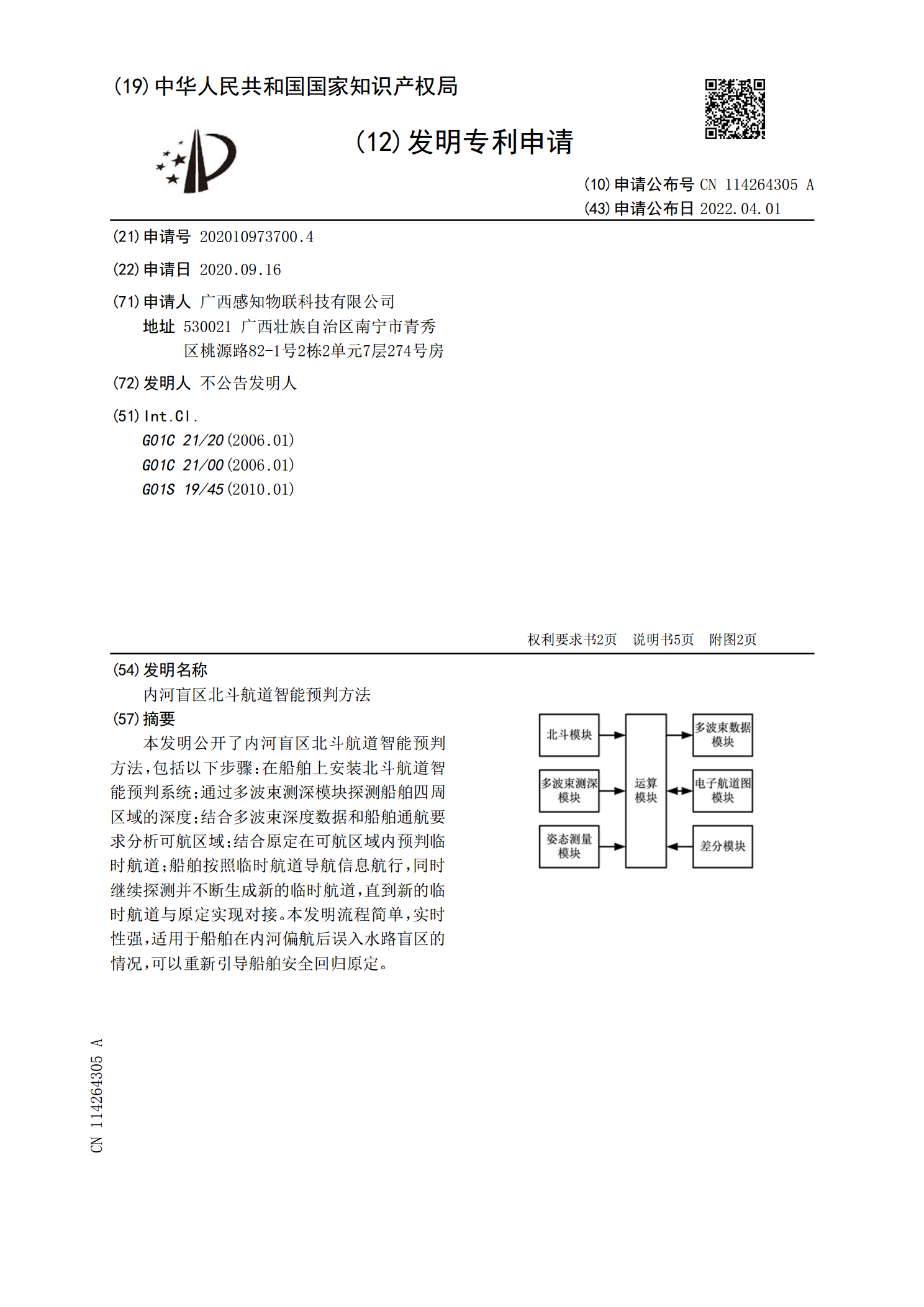
本发明公开了内河盲区北斗航道智能预判方法,包括以下步骤:在船舶上安装北斗航道智能预判系统;通过多波束测深模块探测船舶四周区域的深度;结合多波束深度数据和船舶通航要求分析可航区域;结合原定在可航区域内预判临时航道;船舶按照临时航道导航信息航行,同时继续探测并不断生成新的临时航道,直到新的临时航道与原定实现对接。本发明流程简单,实时性强,适用于船舶在内河偏航后误入水路盲区的情况,可以重新引导船舶安全回归原定。

高精度北斗内河水路盲区航道预判系统.pdf
本发明公开了高精度北斗内河水路盲区航道预判系统,包括主控主板、电源模块、显示模块、水声换能器阵列模块、声速测量模块、姿态测量模块、北斗与GPS模块、差分模块、航道标定模块、通信模块和导航单元;主控主板与电源模块、显示模块、水声换能器阵列模块、声速测量模块、姿态测量模块、北斗与GPS模块、差分模块、航道标定模块、通信模块、导航单元相连接;主控主板固化集成存储模块、控制处理器和内存模块;导航单元包括临时航道预判模块和语音模块。该系统结构简单、使用方便,适用于水路盲区探测行船,提高水运安全性。

基于北斗的内河航道航标智能监控系统方案设计.pptx
基于北斗的内河航道航标智能监控系统方案设计目录系统概述北斗系统介绍内河航道航标智能监控系统需求系统设计目标系统架构设计硬件架构软件架构数据存储与处理系统功能设计航标状态监测远程控制与报警数据传输与处理地图定位与显示系统关键技术实现北斗定位技术数据传输协议远程控制技术数据存储与处理技术系统测试与验证系统测试方案测试环境搭建测试结果分析系统性能优化系统应用与推广系统应用场景系统推广策略经济效益分析社会效益分析感谢观看
认知智能连铸钢包质量预判模型的应用方法及系统.pdf
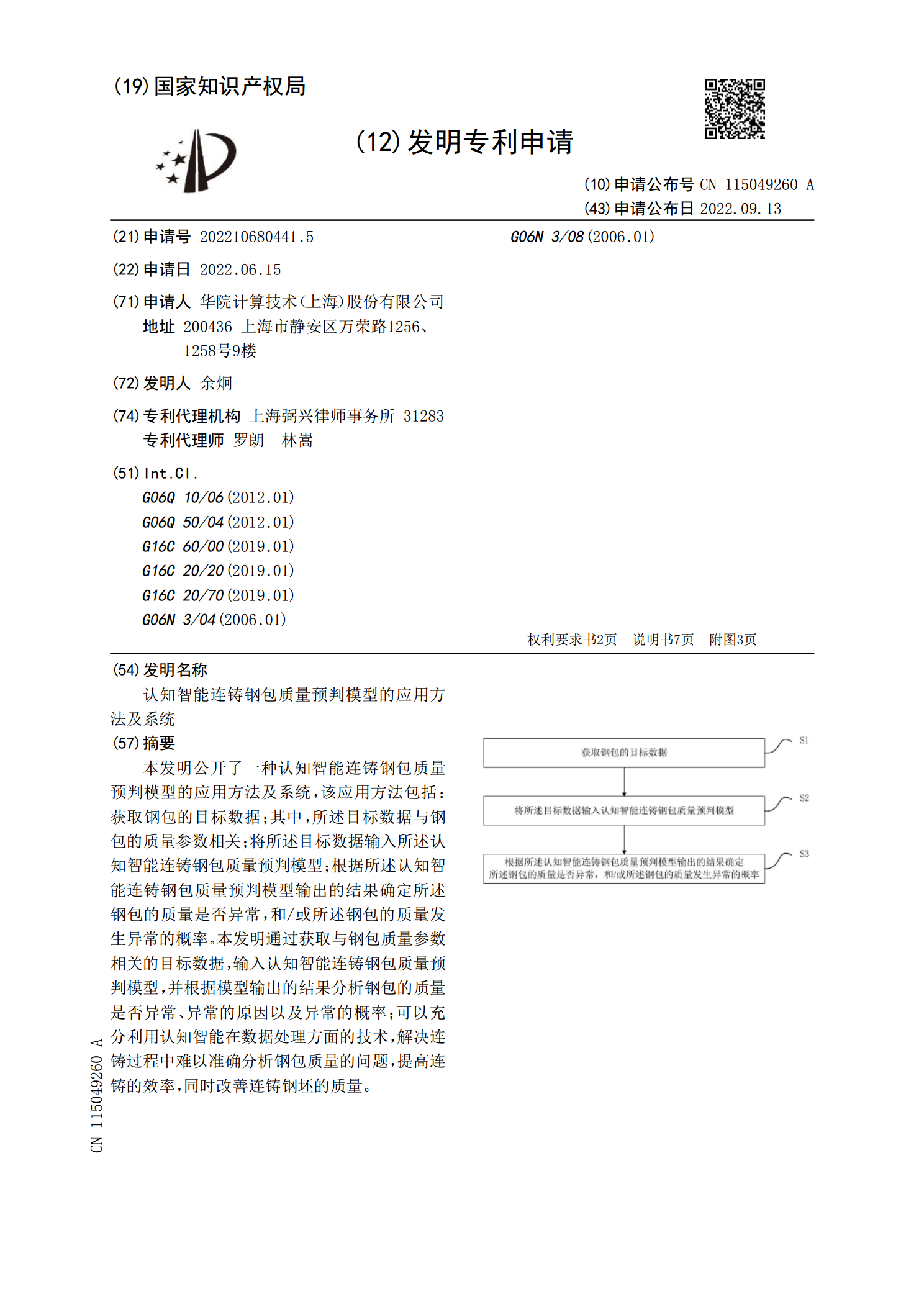
本发明公开了一种认知智能连铸钢包质量预判模型的应用方法及系统,该应用方法包括:获取钢包的目标数据;其中,所述目标数据与钢包的质量参数相关;将所述目标数据输入所述认知智能连铸钢包质量预判模型;根据所述认知智能连铸钢包质量预判模型输出的结果确定所述钢包的质量是否异常,和/或所述钢包的质量发生异常的概率。本发明通过获取与钢包质量参数相关的目标数据,输入认知智能连铸钢包质量预判模型,并根据模型输出的结果分析钢包的质量是否异常、异常的原因以及异常的概率;可以充分利用认知智能在数据处理方面的技术,解决连铸过程中难以准

羽毛球预判方法.docx
羽毛球预判方法羽毛球预判方法本篇文章主要为大家介绍打羽毛球的技巧中的羽毛球预判行为。预判,就是对于对手下一个来球的线路作出一个提前的判断。实际的预判过程中,技术性预判和行为性预判中的几个要点并不是有序的,而是在综合经验及条件反射过程中下意识的完成判断。那么何时预判?怎么预判、预判有哪些要点?我就上边的几个常见的问题作一个分析。关于这方面的内容,小编整理了一些相关资料给大家参考,觉得有用的话就快快收藏吧。打羽毛球的技巧之羽毛球预判一:技术性预判就是我们平常概念里的羽毛球预判,它是指在我方出球质量保证的前提下