
浅海水声MPSK信号盲解调方法及系统.pdf

高格****gu

1/10
2/10
3/10

4/10

5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
浅海水声MPSK信号盲解调方法及系统.pdf
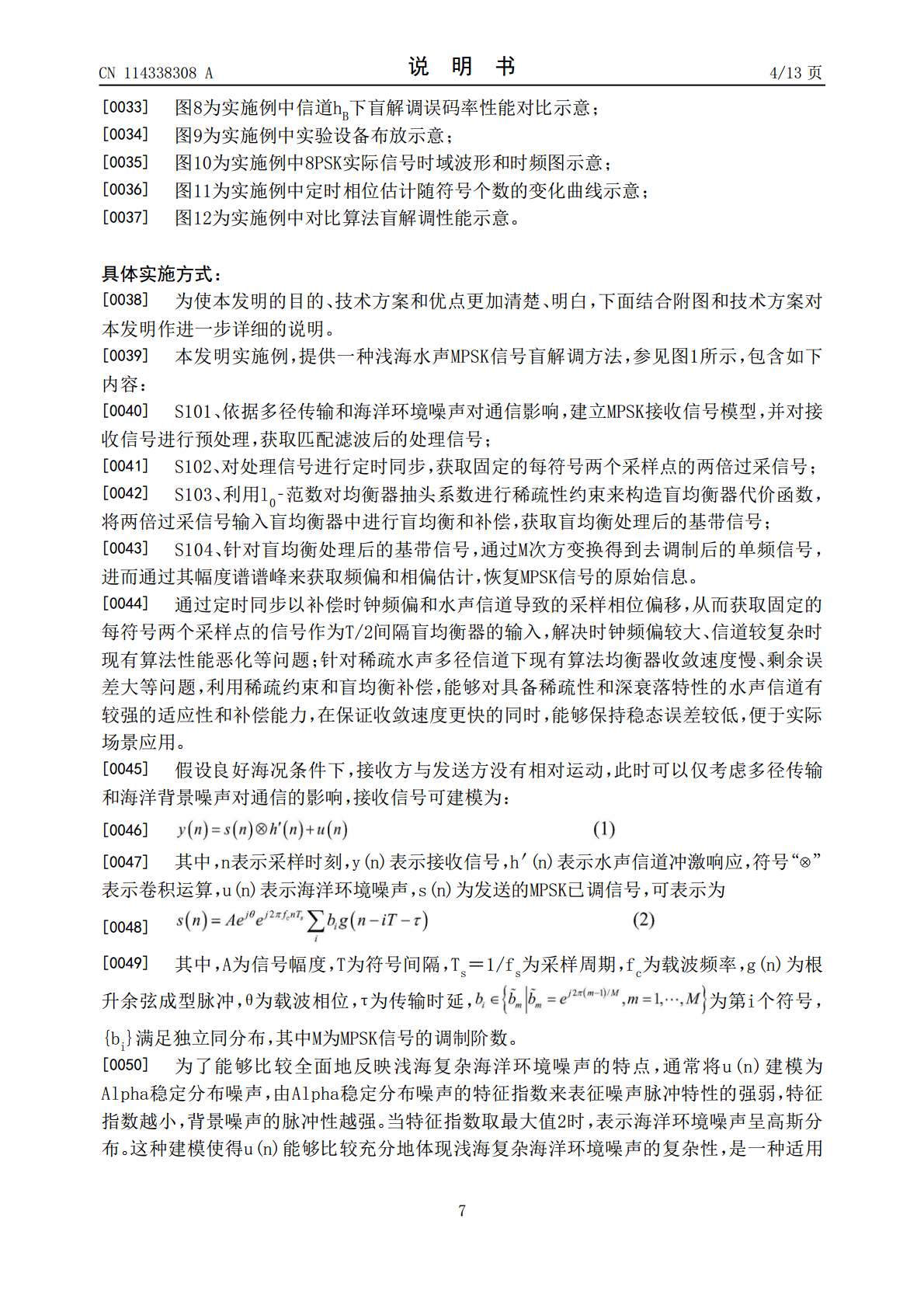
本发明属于水声通信信号盲处理技术领域,特别涉及一种浅海水声MPSK信号盲解调方法及系统,依据多径传输和海洋环境噪声对通信影响,建立MPSK接收信号模型,并对接收信号进行预处理,获取匹配滤波后的处理信号;对处理信号定时同步,获取固定的每符号两个采样点的两倍过采信号;利用l
基于信道盲估计的水声MPSK信号盲Turbo均衡方法.pdf
本发明属于信道盲均衡技术领域,特别涉及一种基于信道盲估计的水声MPSK信号盲Turbo均衡方法,通过构建水声通信信号模型,该信号模型中发送端和接收端通信双方依据约定参数发送线性调频信号作为前导信号,并经过保护间隔后根据通信双方约定调制方式收发数据报文;对接收端线性调频信号进行分数阶傅里叶变换,获取信道参数估计值;并依据接收端保护间隔获取噪声功率估计值;结合信道参数估计值和噪声功率估计值,对接收端MPSK信号进行Turbo均衡。本发明不再借助数据报文,而是充分利用前导LFM信号获得信道估计值,节省自适应滤波

浅海脉冲噪声和稀疏多途信道下OFDM-MFSK信号盲解调方法及系统.pdf
本发明属于水声通信信号盲处理技术领域,特别涉及一种浅海脉冲噪声和稀疏多途信道下OFDM‑MFSK信号盲解调方法及系统,建立OFDM‑MFSK信号接收模型,并对接收信号进行脉冲噪声自适应限幅预处理;通过参数估计来获取有用符号持续时间和子载波数,并通过符号定时同步与偏差估计和小数倍载波频偏偏差FFO估计获取补偿后的信号;利用FFT解调获得符号的自相关矩阵,并利用虚拟子载波特征获取整数倍载波频偏估计;对解调后信号进行循环移位补偿,通过统计信号幅度来获取子载波调制阶数,并依据阶数分组及按组择大判决结果来获取OFD
一种适用于浅海低频条件的水声信号盲解卷方法.pdf
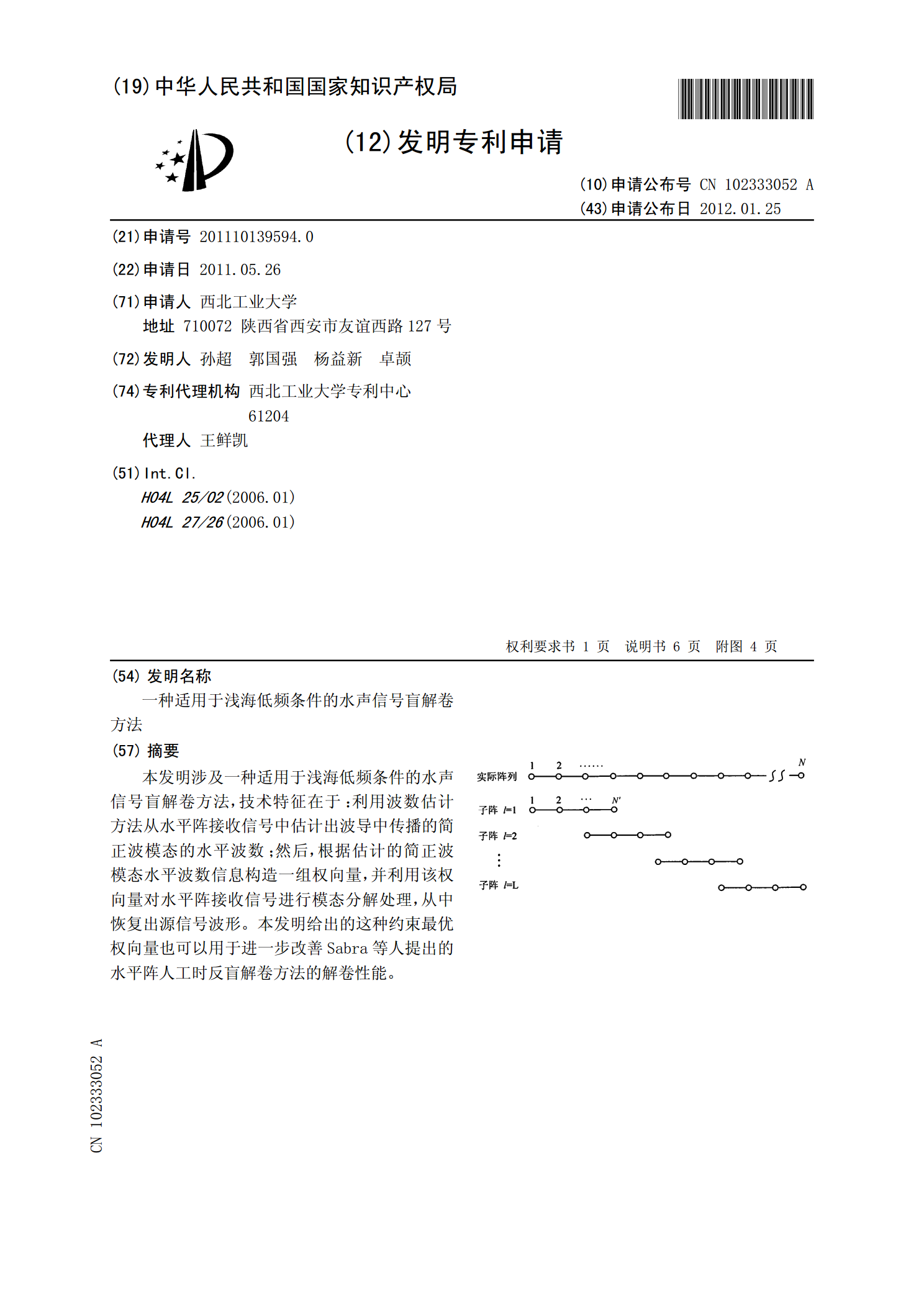
本发明涉及一种适用于浅海低频条件的水声信号盲解卷方法,技术特征在于:利用波数估计方法从水平阵接收信号中估计出波导中传播的简正波模态的水平波数;然后,根据估计的简正波模态水平波数信息构造一组权向量,并利用该权向量对水平阵接收信号进行模态分解处理,从中恢复出源信号波形。本发明给出的这种约束最优权向量也可以用于进一步改善Sabra等人提出的水平阵人工时反盲解卷方法的解卷性能。
基于CPU-GPU异构结构的流式MPSK软件无线电信号解调方法及系统.pdf
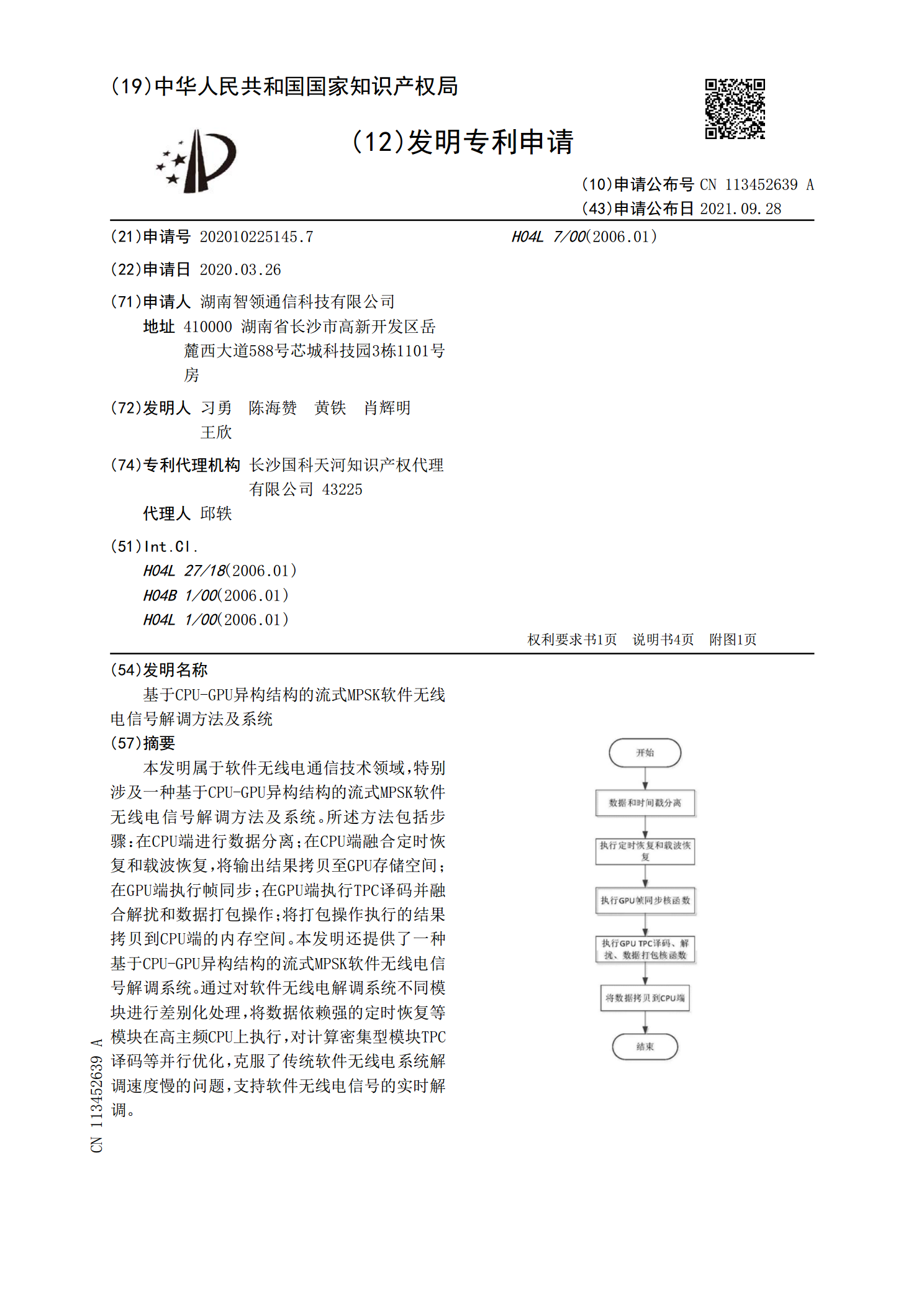
本发明属于软件无线电通信技术领域,特别涉及一种基于CPU‑GPU异构结构的流式MPSK软件无线电信号解调方法及系统。所述方法包括步骤:在CPU端进行数据分离;在CPU端融合定时恢复和载波恢复,将输出结果拷贝至GPU存储空间;在GPU端执行帧同步;在GPU端执行TPC译码并融合解扰和数据打包操作;将打包操作执行的结果拷贝到CPU端的内存空间。本发明还提供了一种基于CPU‑GPU异构结构的流式MPSK软件无线电信号解调系统。通过对软件无线电解调系统不同模块进行差别化处理,将数据依赖强的定时恢复等模块在高主频C