
图像处理方法和装置、车辆、可读存储介质.pdf

雅云****彩妍


1/10

2/10

3/10

4/10
5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

图像处理方法和装置、车辆、可读存储介质.pdf
本公开是关于一种图像处理方法和装置、车辆、可读存储介质。该方法包括:获取车辆的实时位姿以及获取第一数量帧初始纹理图像;根据所述实时位姿和各帧初始纹理图像获取各帧初始纹理图像对应的第一纹理图像;将所述第一纹理图像转换到所述车辆所在坐标系并获取所述车辆的底部对应的区域,得到第二纹理图像;将所述第一数量帧初始纹理图像对应的第二纹理图像进行混合渲染,获得表征所述车辆底部区域场景的目标图像。本实施例通过获得车辆底部区域场景的目标图像,可以监控车辆底部路面情况,扩大视野范围即减少视野盲区,有利于提升无人驾驶车辆的安全

图像处理方法、装置和可读存储介质.pdf
本发明公开了一种图像处理方法、装置和可读存储介质,所述图像处理方法包括:获取用户的位姿信息,依据所述位姿信息确定用户的预先观看方向;依据所述预先观看方向,提前提高所述预先观看方向区域的图像分辨率的步骤。本发明技术方案能够在人眼注视前开始进行画面渲染,提高画面的稳定性。

图像处理方法、装置、设备和可读存储介质.pdf
本申请公开了一种图像处理方法、装置、设备和可读存储介质,涉及深度学习技术领域。具体实现方案为:获取待处理图像,通过图像处理模型提取所述待处理图像的原始图像特征,提取所述原始图像特征的深度特征,以及对所述原始图像特征和所述深度特征进行合并,并对合并后的特征进行还原,得到清晰化处理后的图像。本实施例,通过图像处理模型提取所述待处理图像的原始图像特征,得到高精度的浅层特征;通过提取所述原始图像特征的深度特征,得到细节特征;通过对原始图像特征和所述深度特征进行合并,从而融合浅层特征和深度特征,有效去除马赛克、伪影
图像处理方法及装置、终端和可读存储介质.pdf
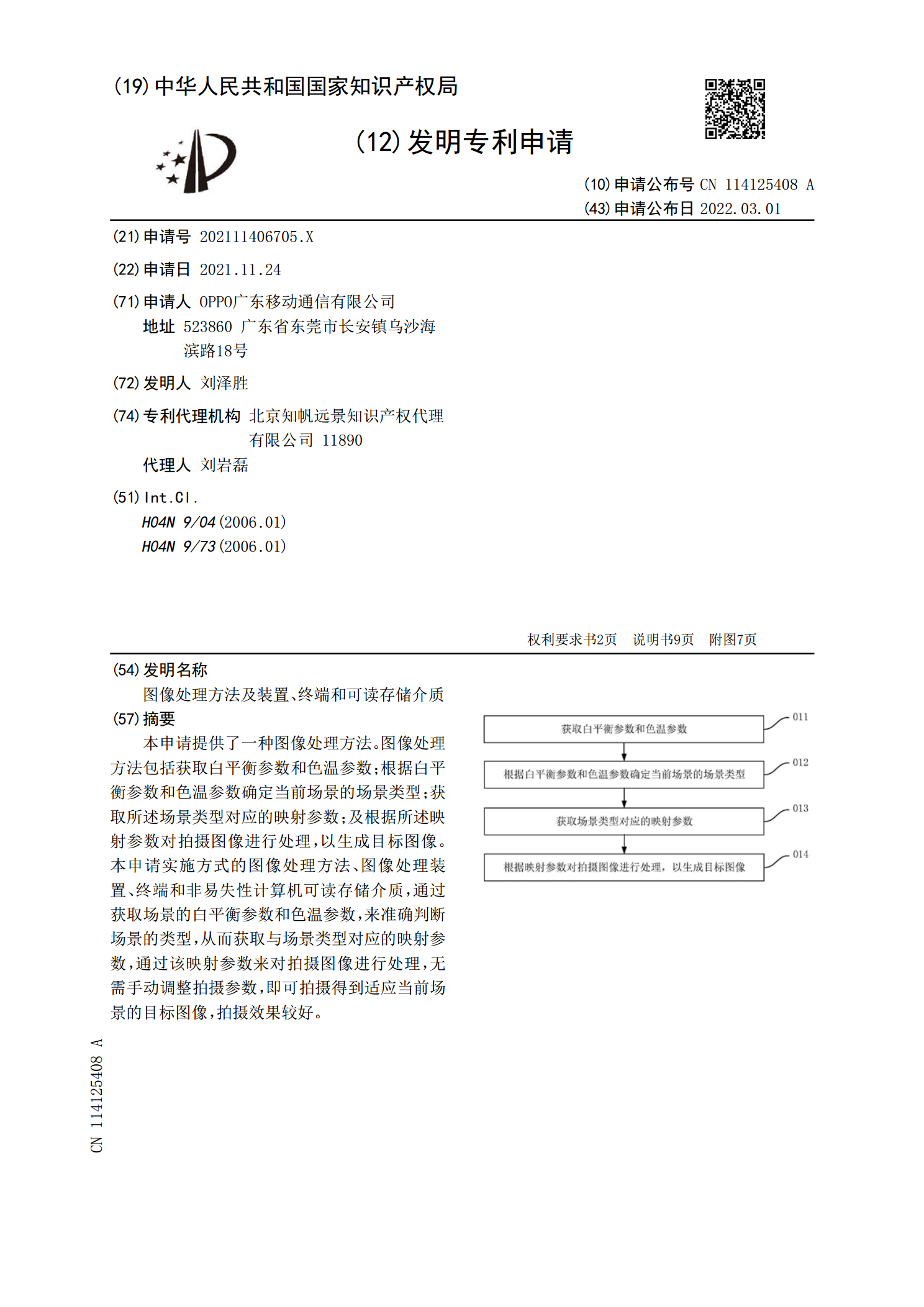
本申请提供了一种图像处理方法。图像处理方法包括获取白平衡参数和色温参数;根据白平衡参数和色温参数确定当前场景的场景类型;获取所述场景类型对应的映射参数;及根据所述映射参数对拍摄图像进行处理,以生成目标图像。本申请实施方式的图像处理方法、图像处理装置、终端和非易失性计算机可读存储介质,通过获取场景的白平衡参数和色温参数,来准确判断场景的类型,从而获取与场景类型对应的映射参数,通过该映射参数来对拍摄图像进行处理,无需手动调整拍摄参数,即可拍摄得到适应当前场景的目标图像,拍摄效果较好。

图像处理方法、拍摄装置、图像处理装置及可读存储介质.pdf
本发明揭示了一种图像处理方法,包括:获取待拍摄画面的预览帧的初始曝光值EV0;根据预览帧的亮度值小于第一亮度阈值Y1的像素计算第一长曝光值EV1;根据预览帧的亮度值大于第二亮度阈值Y2的像素计算第一短曝光值EV2;将预览帧分割成多个帧块;根据平均亮度值小于第三亮度阈值Y3的帧块计算第二长曝光值EV3;根据平均亮度值大于第四亮度阈值Y4的帧块计算第二短曝光值EV4;根据第一长曝光值EV1和第二长曝光值EV3计算最终长曝光值EV5;根据第一短曝光值EV2和第二短曝光值EV4计算最终短曝光值EV6;将曝光值分别