
一种家用安防智能车系统控制方法.pdf

雨巷****轶丽


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种家用安防智能车系统控制方法.pdf
本发明提供了一种家用安防智能车系统控制方法,利用摄像头采集到的图像,通过融合红外补偿算法的图像导航算法、直流电机运动控制算法实现自动导航,在图像处理上,使用边缘检测算法将得到的物体的图像边缘,拟合出导航路径,在遇到疑似障碍物时,用长方形模糊算法判断障碍物的存在,并得到拟合路径,对摄像头视野盲区,使用红外测距对路径进行补偿,最后用PID算法进行电机运动控制,抑制车体在转弯时出现转向抽搐,甩尾;环境感知方面采用周期检测,阈值比对,语音播报,并将监测到的环境数据实时上传到云端,使用户可通过手机APP端查看,并能

一种智能安防巡逻车.pdf
本发明涉及巡逻车领域,公开了一种智能安防巡逻车,包括机车、车轮、驾驶室、操控面板、摄像装置;所述机车的上部左侧内部设置有一组与操控面板电连的控制箱,控制箱上侧的机车的外顶部固定安装有用于控制箱电连的无线收发器,机车的中部左侧壁固定设置有与控制箱电连的喇叭且位于操控面板下侧的驾驶室的内侧壁设置有一键报警装置,位于驾驶室外侧的机车的前后左三处固定安装有一组滑轨,滑轨的内部开设有滑槽,滑槽的内部滚动连接有摄像装置,机车的下部四面侧壁中部均安装有一组热敏成像仪,热敏成像仪与控制箱电连。本发明的优点是:巡逻安防精度

一种具有智能安防功能的旅居车.pdf
本发明提供一种具有智能安防功能的旅居车,涉及旅居车技术领域,该具有智能安防功能的旅居车包括车体,所述车体的两个侧面均开设有门口和窗口,所述车体上设置有用于分别关闭门口和窗口的车门和窗门,所述车体的两侧均设置有防护结构,当有人员长时间停留在智能房车的侧面时,通过物位传感器的感应作用控制双头转动驱动装置带动圆柱齿轮和第二锥齿轮转动,圆柱齿轮转动通过两个齿条带动门口防护板和窗口防护板对门口和窗口位置进行封堵,有效阻止了盗窃者进入车内,第二锥齿轮转动通过第一锥齿轮和转杆和带动滑板移动,滑板移动带动第一支杆与第二支

一种旅居车用智能安防装置.pdf
一种旅居车用智能安防装置,包括车头,底座,车轮,车厢,还包括车门,控制器,报警器,太阳能电池板,安装支架,控制器安装在车厢内部右侧,报警器安装在车厢顶部,安装支架安装在车厢顶部,太阳能电池板安装在安装支架上,车门上设有把手,人体接近传感器,显示屏,锁孔,指纹识别装置,摄像机,把手安装在车门上,锁孔安装在把手的右侧,指纹识别装置安装在把手的右侧,人体接近传感器安装在指纹识别装置的左侧,显示屏安装在把手的上端,摄像机安装在显示屏的上端,本发明克服了现有技术的不足,设置控制器,报警器,摄像机,人体接近传感器,当
安防系统控制方法及装置.pdf
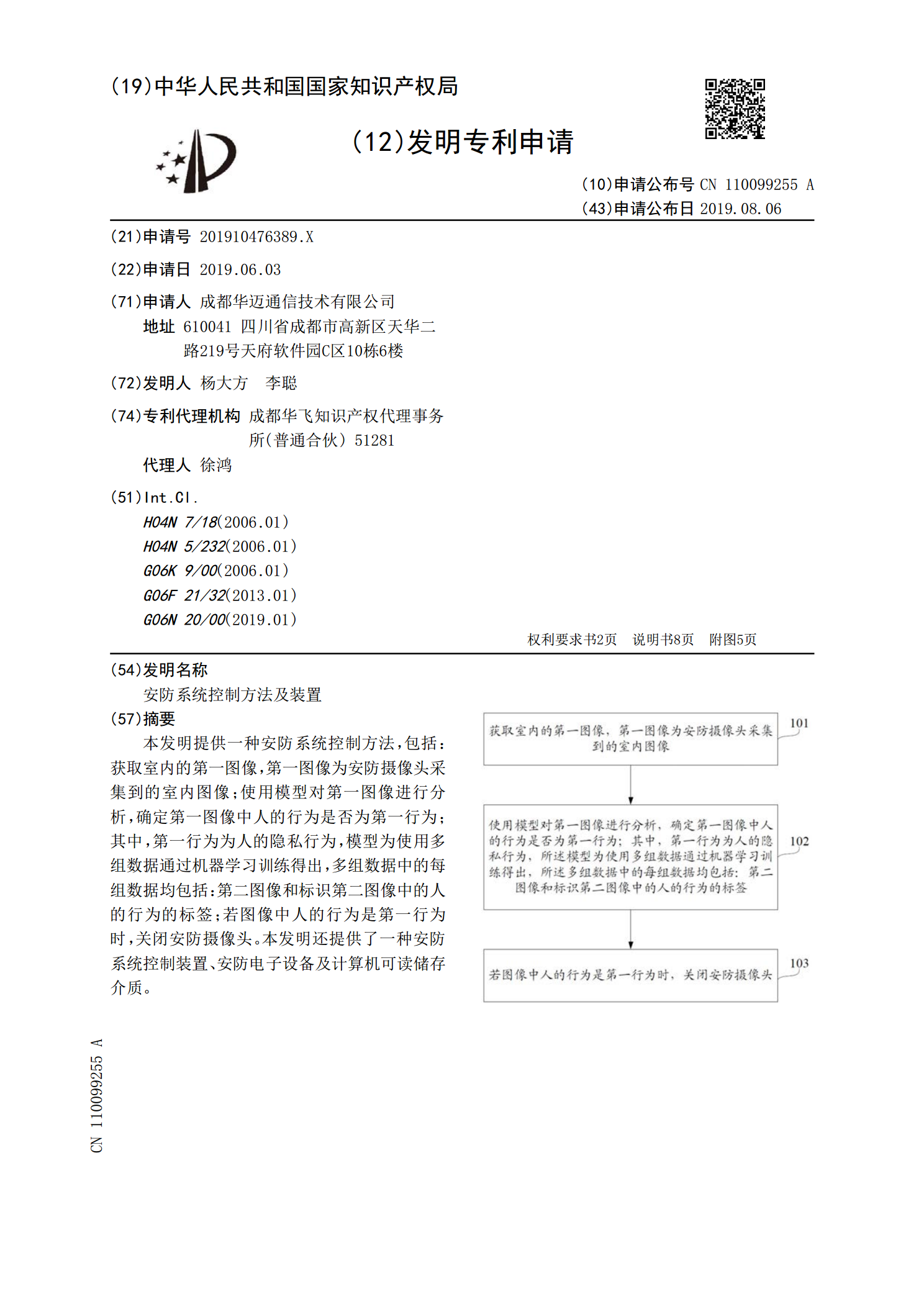
本发明提供一种安防系统控制方法,包括:获取室内的第一图像,第一图像为安防摄像头采集到的室内图像;使用模型对第一图像进行分析,确定第一图像中人的行为是否为第一行为;其中,第一行为为人的隐私行为,模型为使用多组数据通过机器学习训练得出,多组数据中的每组数据均包括:第二图像和标识第二图像中的人的行为的标签;若图像中人的行为是第一行为时,关闭安防摄像头。本发明还提供了一种安防系统控制装置、安防电子设备及计算机可读储存介质。