
基于自适应粒子群算法的灰度图像增强方法及设备.pdf

是立****92

1/10

2/10
3/10

4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于自适应粒子群算法的灰度图像增强方法及设备.pdf
本发明提供了一种基于自适应粒子群算法的灰度图像增强方法及设备,包括:S1:定义图像转换函数,输入的灰度图像将通过图像转换函数进行增强;S2:通过自适应粒子群算法确定图像转换函数中的参数数值,在保障图像信息量的情况下获得更清晰的图像轮廓;S3:根据自适应粒子群算法确定的参数数值,通过图像转换函数输出增强后的灰度图像。本发明通过在构建图像转换函数时考虑图像的局部信息,改进了传统图像增强中仅考虑图像全局信息的不足,在不损失图像信息量的情况下强化图像轮廓,实现了对求解空间全局搜索与局部挖掘的自适应平衡,不仅规避了

基于灰度变换的图像伪彩色增强算法设计.doc
毕业设计基于灰度变换的图像伪彩色增强算法设计毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。作者签名:日期: 指导教师签名:日期:使用授权说明本人完全了解大学关于

基于改进粒子群优化算法的灰度图像分割研究的开题报告.docx
基于改进粒子群优化算法的灰度图像分割研究的开题报告一、选题背景随着数字图像的广泛应用,图像分割技术成为计算机视觉领域中的热点问题。灰度图像分割是其中的重要分支,其目的是将灰度图像分成若干个互不重叠的子区域,每个子区域具有相似的颜色、纹理、边界等特征。图像分割技术广泛应用于医学图像分析、工业自动化、军事和情报等领域。然而,灰度图像分割的效果受到很多因素的影响,例如噪声、光照不均、图像复杂性等。因此,如何提高灰度图像分割的准确率和稳定性是一个重要的研究方向。二、研究目的本研究旨在针对灰度图像分割中的优化问题,
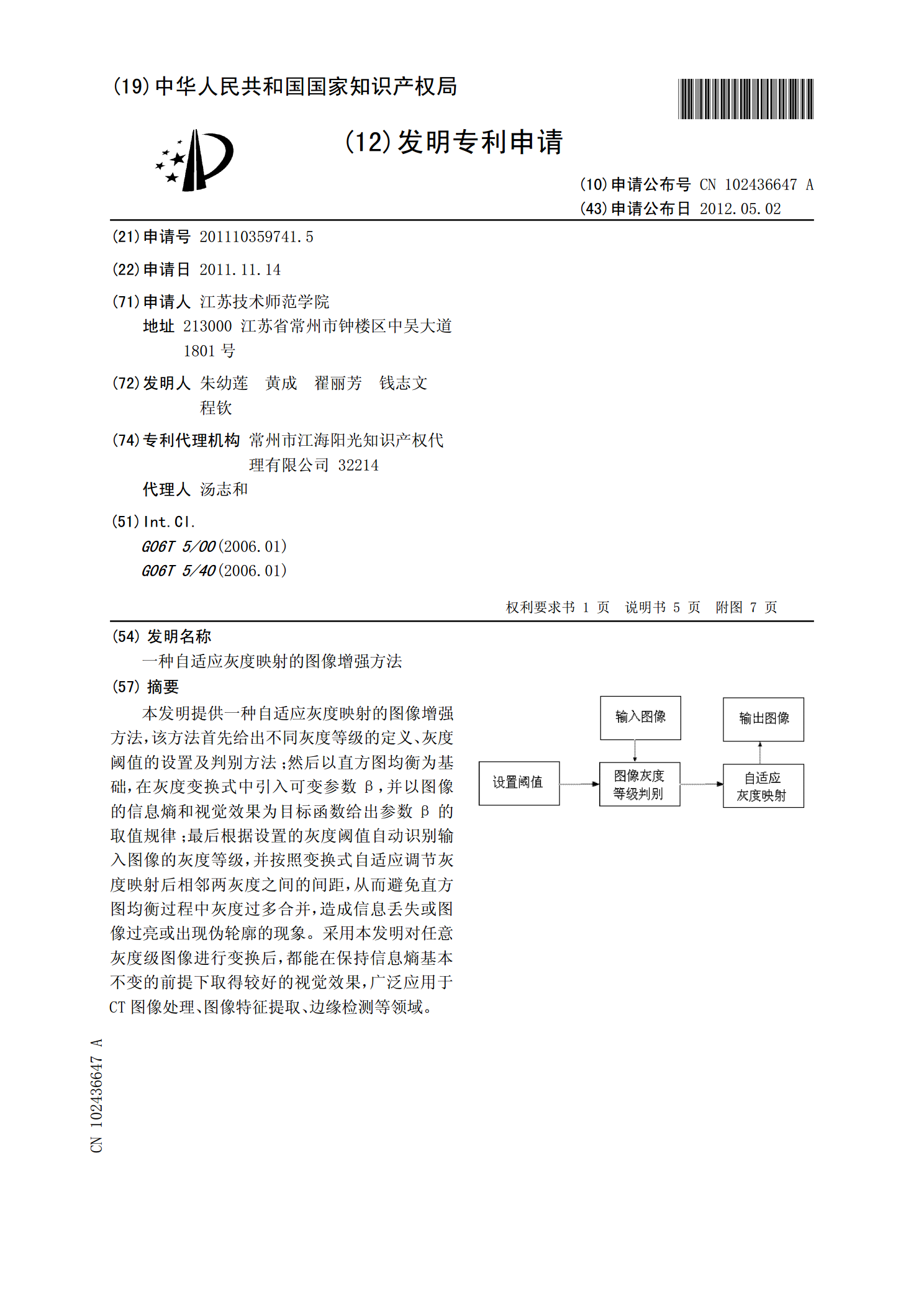
一种自适应灰度映射的图像增强方法.pdf
本发明提供一种自适应灰度映射的图像增强方法,该方法首先给出不同灰度等级的定义、灰度阈值的设置及判别方法;然后以直方图均衡为基础,在灰度变换式中引入可变参数β,并以图像的信息熵和视觉效果为目标函数给出参数β的取值规律;最后根据设置的灰度阈值自动识别输入图像的灰度等级,并按照变换式自适应调节灰度映射后相邻两灰度之间的间距,从而避免直方图均衡过程中灰度过多合并,造成信息丢失或图像过亮或出现伪轮廓的现象。采用本发明对任意灰度级图像进行变换后,都能在保持信息熵基本不变的前提下取得较好的视觉效果,广泛应用于CT图像处
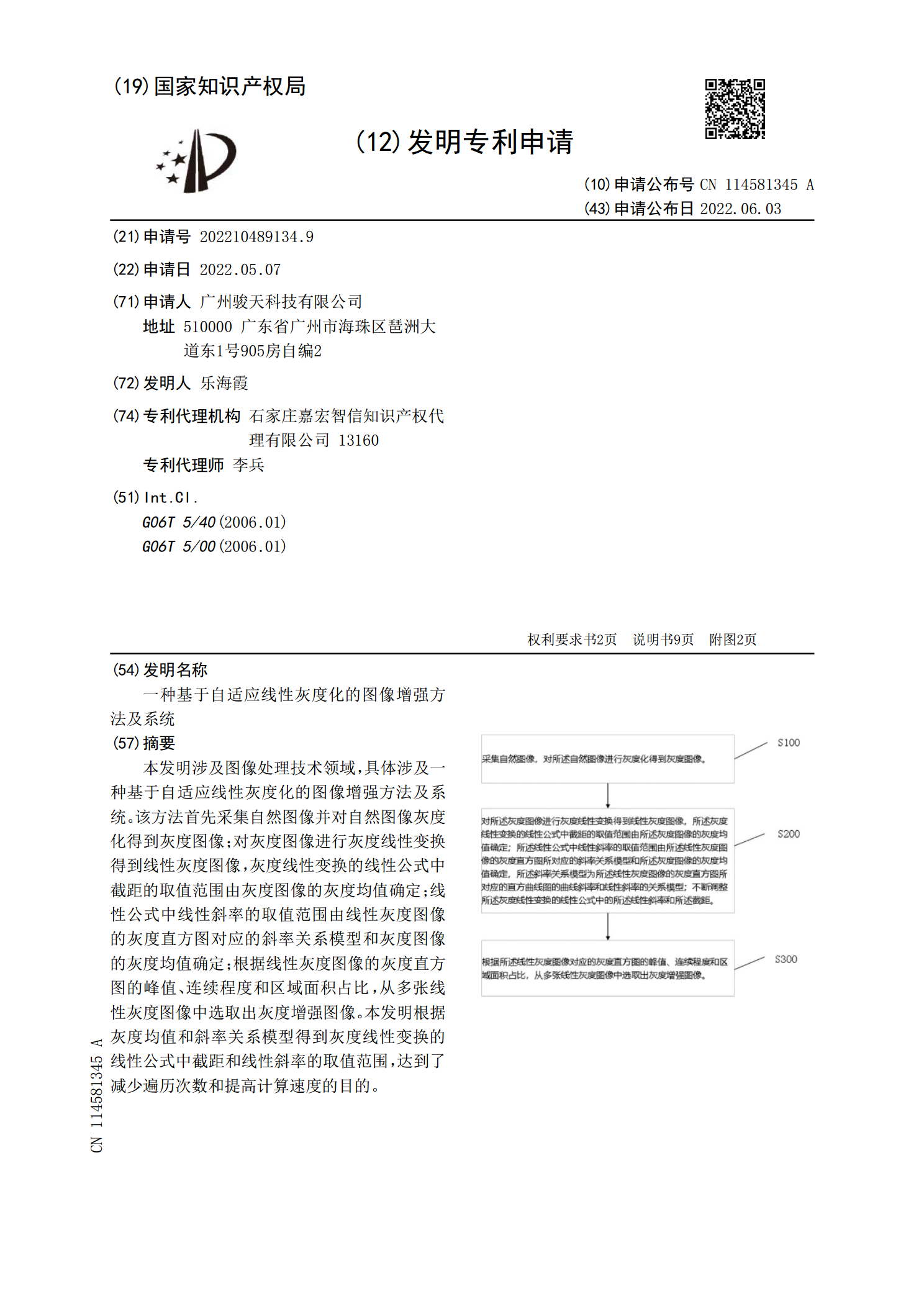
一种基于自适应线性灰度化的图像增强方法及系统.pdf
本发明涉及图像处理技术领域,具体涉及一种基于自适应线性灰度化的图像增强方法及系统。该方法首先采集自然图像并对自然图像灰度化得到灰度图像;对灰度图像进行灰度线性变换得到线性灰度图像,灰度线性变换的线性公式中截距的取值范围由灰度图像的灰度均值确定;线性公式中线性斜率的取值范围由线性灰度图像的灰度直方图对应的斜率关系模型和灰度图像的灰度均值确定;根据线性灰度图像的灰度直方图的峰值、连续程度和区域面积占比,从多张线性灰度图像中选取出灰度增强图像。本发明根据灰度均值和斜率关系模型得到灰度线性变换的线性公式中截距和线