
盲区的确定方法、确定装置、处理器与车辆.pdf

星星****眨眼


1/10

2/10

3/10

4/10

5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
盲区的确定方法、确定装置、处理器与车辆.pdf
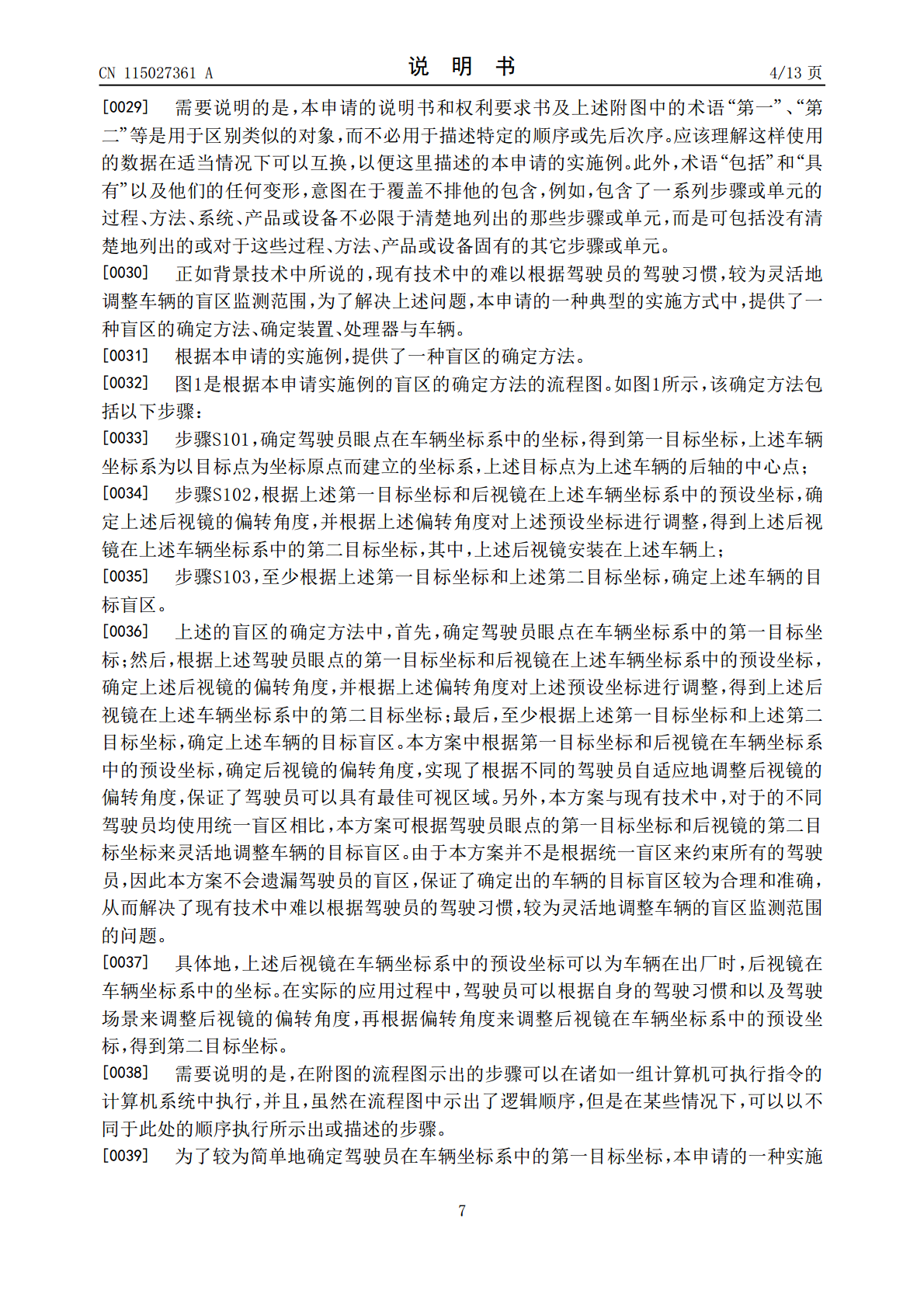
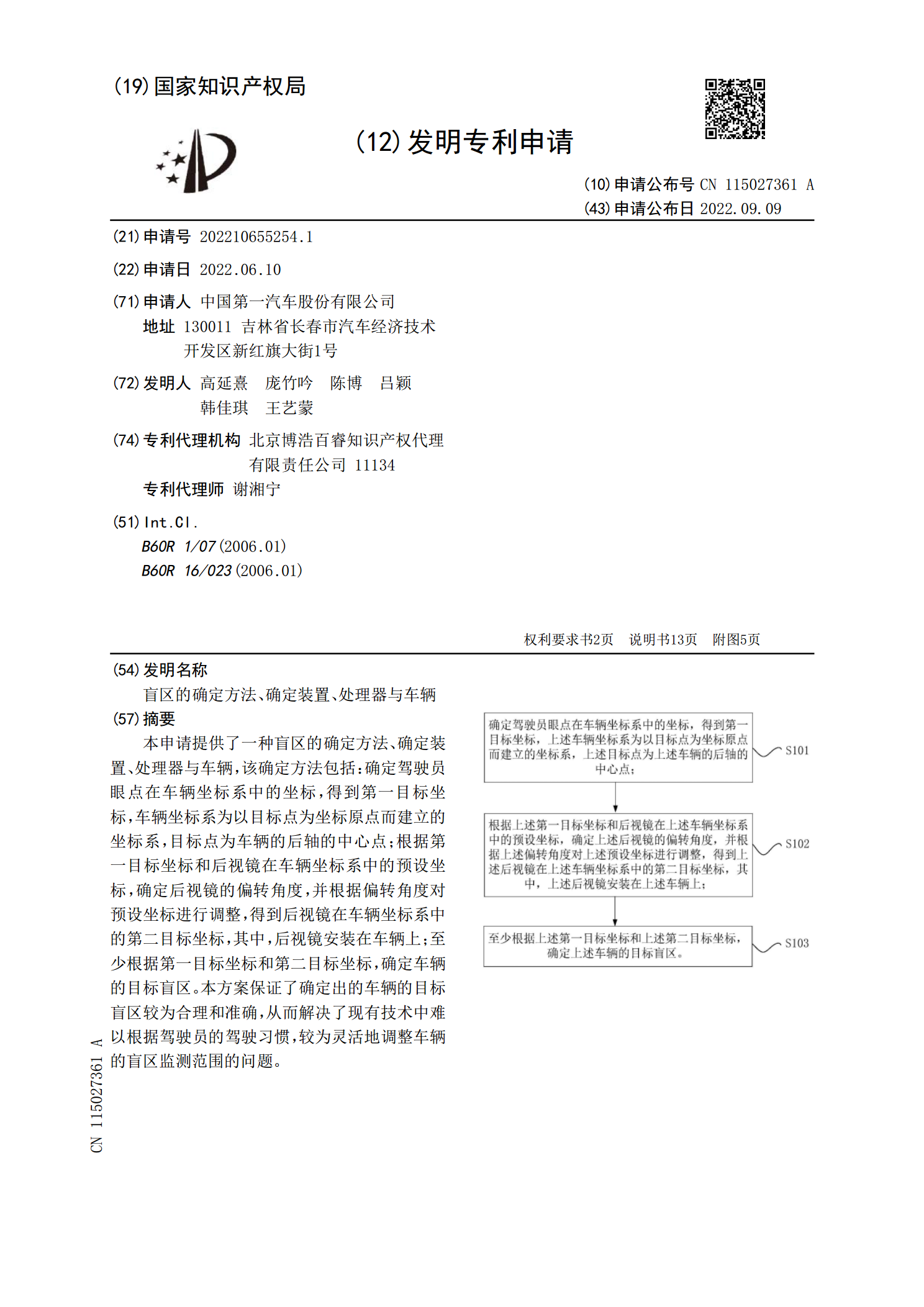
本申请提供了一种盲区的确定方法、确定装置、处理器与车辆,该确定方法包括:确定驾驶员眼点在车辆坐标系中的坐标,得到第一目标坐标,车辆坐标系为以目标点为坐标原点而建立的坐标系,目标点为车辆的后轴的中心点;根据第一目标坐标和后视镜在车辆坐标系中的预设坐标,确定后视镜的偏转角度,并根据偏转角度对预设坐标进行调整,得到后视镜在车辆坐标系中的第二目标坐标,其中,后视镜安装在车辆上;至少根据第一目标坐标和第二目标坐标,确定车辆的目标盲区。本方案保证了确定出的车辆的目标盲区较为合理和准确,从而解决了现有技术中难以根据驾驶
盲区超车监测装置、确定驾驶意图的方法、装置及车辆.pdf
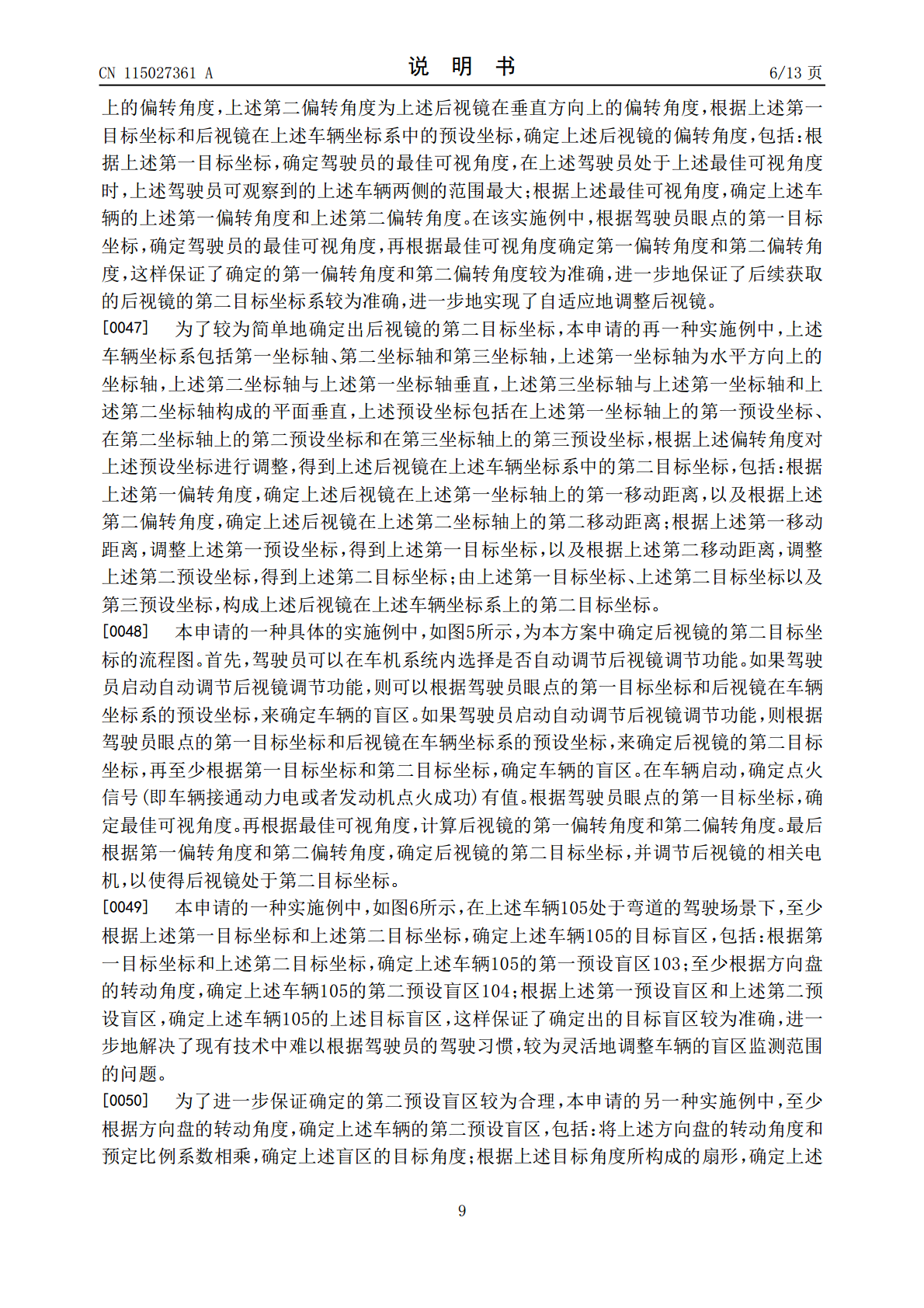
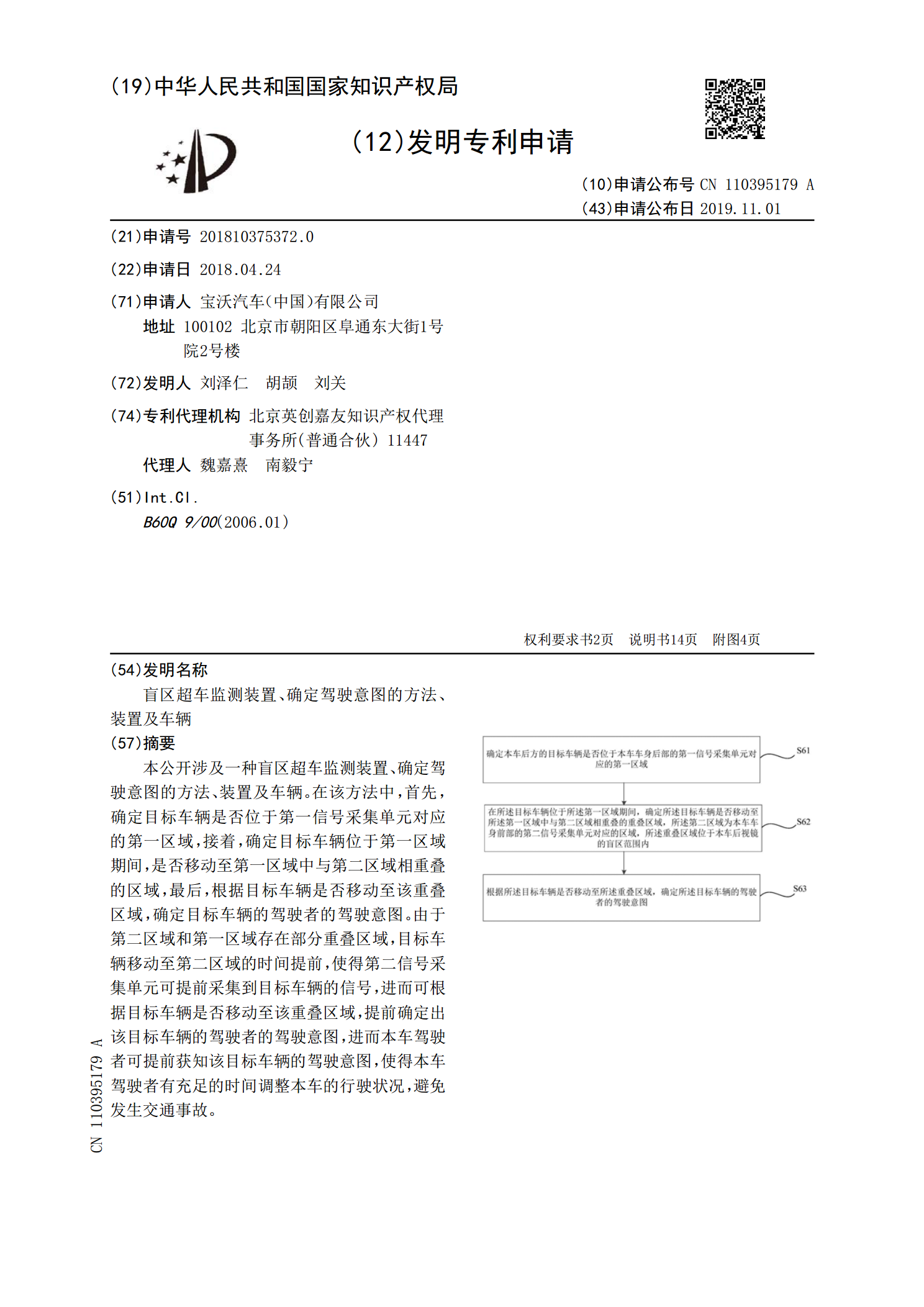
本公开涉及一种盲区超车监测装置、确定驾驶意图的方法、装置及车辆。在该方法中,首先,确定目标车辆是否位于第一信号采集单元对应的第一区域,接着,确定目标车辆位于第一区域期间,是否移动至第一区域中与第二区域相重叠的区域,最后,根据目标车辆是否移动至该重叠区域,确定目标车辆的驾驶者的驾驶意图。由于第二区域和第一区域存在部分重叠区域,目标车辆移动至第二区域的时间提前,使得第二信号采集单元可提前采集到目标车辆的信号,进而可根据目标车辆是否移动至该重叠区域,提前确定出该目标车辆的驾驶者的驾驶意图,进而本车驾驶者可提前获
确定信号盲区的方法、确定用户位置的方法及装置.pdf
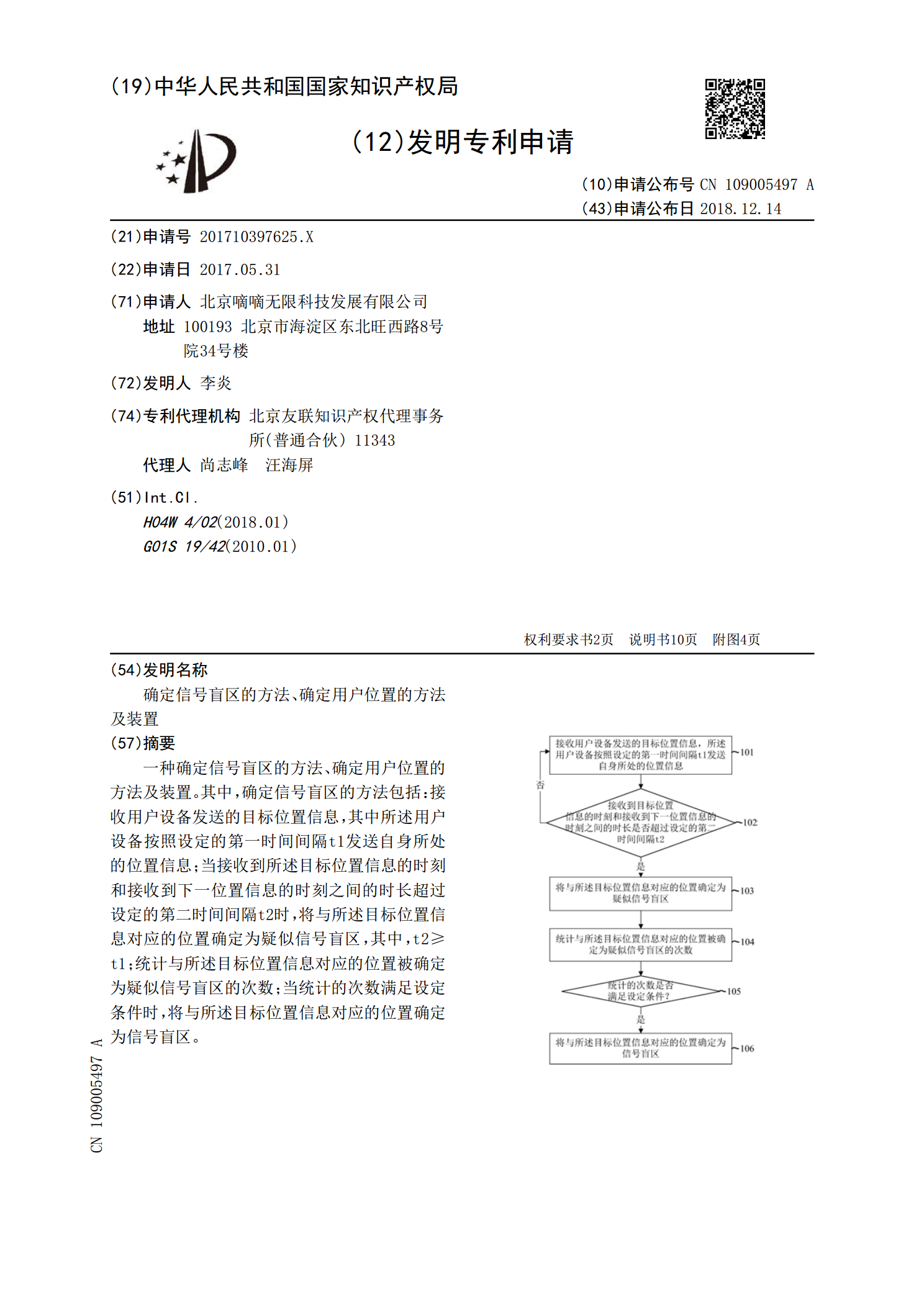
一种确定信号盲区的方法、确定用户位置的方法及装置。其中,确定信号盲区的方法包括:接收用户设备发送的目标位置信息,其中所述用户设备按照设定的第一时间间隔t1发送自身所处的位置信息;当接收到所述目标位置信息的时刻和接收到下一位置信息的时刻之间的时长超过设定的第二时间间隔t2时,将与所述目标位置信息对应的位置确定为疑似信号盲区,其中,t2≥t1;统计与所述目标位置信息对应的位置被确定为疑似信号盲区的次数;当统计的次数满足设定条件时,将与所述目标位置信息对应的位置确定为信号盲区。
地层压力的确定方法、确定装置、处理器和确定系统.pdf
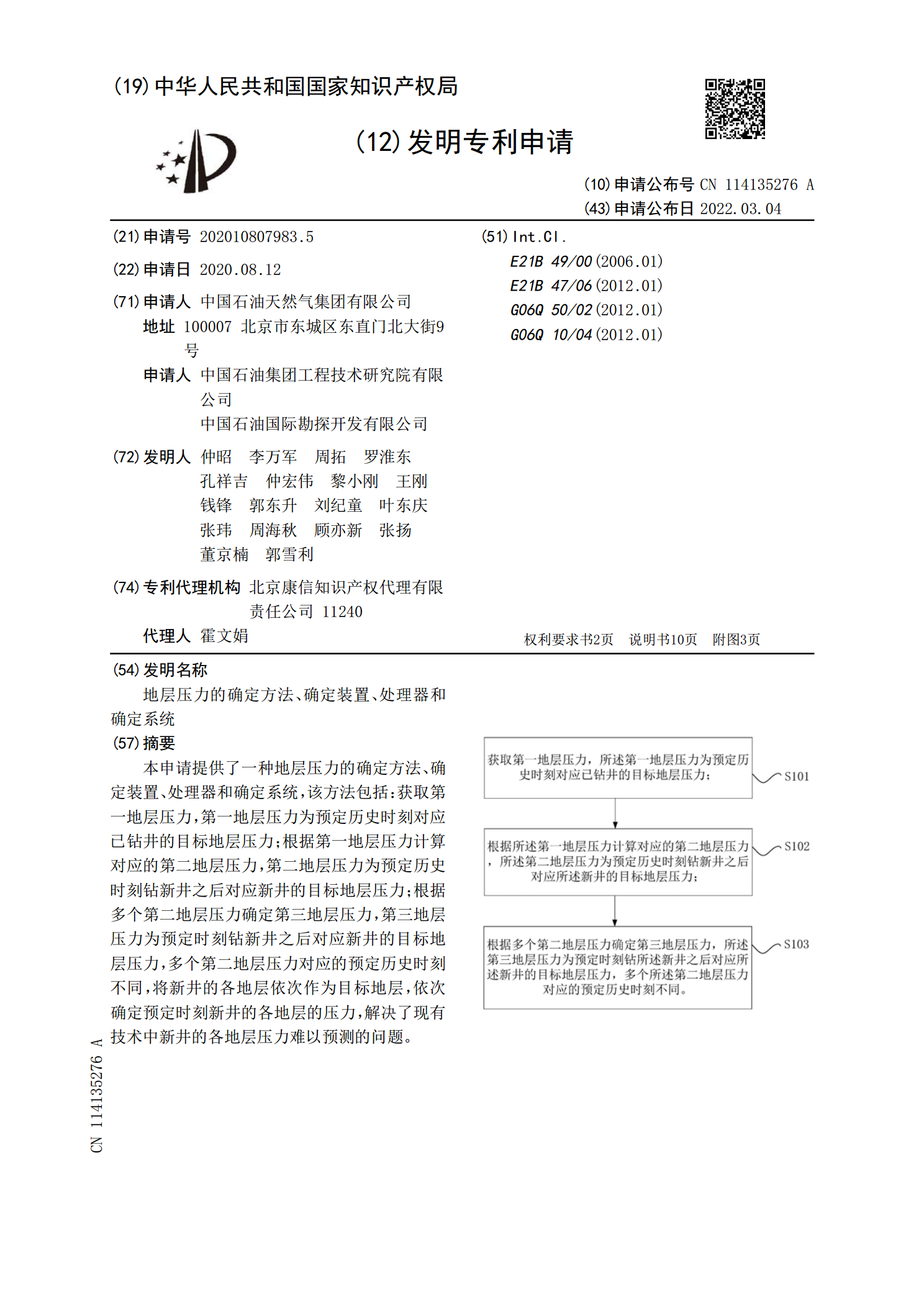
本申请提供了一种地层压力的确定方法、确定装置、处理器和确定系统,该方法包括:获取第一地层压力,第一地层压力为预定历史时刻对应已钻井的目标地层压力;根据第一地层压力计算对应的第二地层压力,第二地层压力为预定历史时刻钻新井之后对应新井的目标地层压力;根据多个第二地层压力确定第三地层压力,第三地层压力为预定时刻钻新井之后对应新井的目标地层压力,多个第二地层压力对应的预定历史时刻不同,将新井的各地层依次作为目标地层,依次确定预定时刻新井的各地层的压力,解决了现有技术中新井的各地层压力难以预测的问题。

危险盲区的确定方法、装置及无人车.pdf
本公开提供了一种危险盲区的确定方法、装置、电子设备、存储介质及程序产品,涉及人工智能领域,具体涉及自动驾驶、智能交通等技术领域。具体实现方案为:获取表征目标车辆所处场景的场景数据和表征目标车辆周围的障碍物的障碍物数据;根据障碍物数据,构建障碍物造成的目标车辆的盲区;根据场景数据,确定场景中对目标车辆构成危险的危险点;根据盲区和危险点的相对关系,确定盲区是否为危险盲区。本公开可以过滤掉非危险盲区,提高了危险盲区的确定准确度和有效性。