
一种导盲避障方法及导盲装置.pdf

是你****平呀


1/10

2/10

3/10
4/10
5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种导盲避障方法及导盲装置.pdf
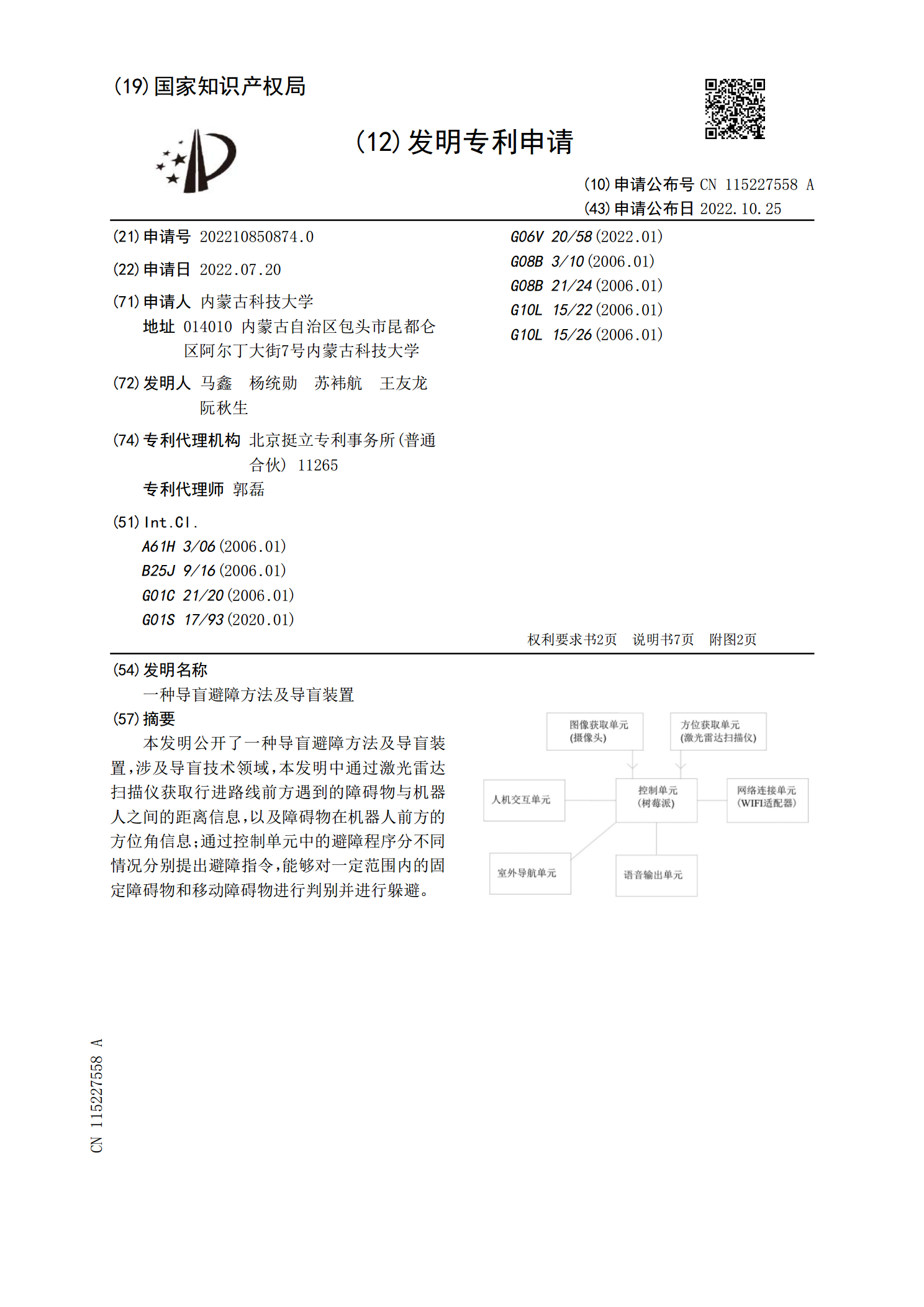
本发明公开了一种导盲避障方法及导盲装置,涉及导盲技术领域,本发明中通过激光雷达扫描仪获取行进路线前方遇到的障碍物与机器人之间的距离信息,以及障碍物在机器人前方的方位角信息;通过控制单元中的避障程序分不同情况分别提出避障指令,能够对一定范围内的固定障碍物和移动障碍物进行判别并进行躲避。

一种导盲避障的方法及装置.pdf
本发明公布一种导盲避障的方法及装置,应用于移动终端,包括:监测障碍物及其与当前位置之间的距离;根据所述障碍物与当前位置之间的距离,确定提示时间间隔;按照所述提示时间间隔,发出提醒。本发明可通过移动终端即可为盲人导盲避障,解决了相关技术中移动终端的导航功能不适用于盲人的问题。

一种引导盲人避障的导盲拐及其避障方法.pdf
本发明公开了一种引导盲人避障的导盲拐及其避障方法,导盲拐本体上设有微处理器模块、震动模块、语音模块、电源模块和两个超声波测距模块,其中两个超声波测距模块在同一水平高度、发射方向均为导盲拐的正前方,当导盲拐测量范围内存在障碍物时,微处理器模块根据两个超声波测距模块所测量的数据、结合两个超声波测距模块的距离计算出障碍物相对盲人正前方的偏离方向、偏离角度和偏离距离,对盲人同时进行语音和震动提示。本发明可以准确判断出障碍物的位置,并通过震动方式的提醒加强了安全保障,智能便捷。
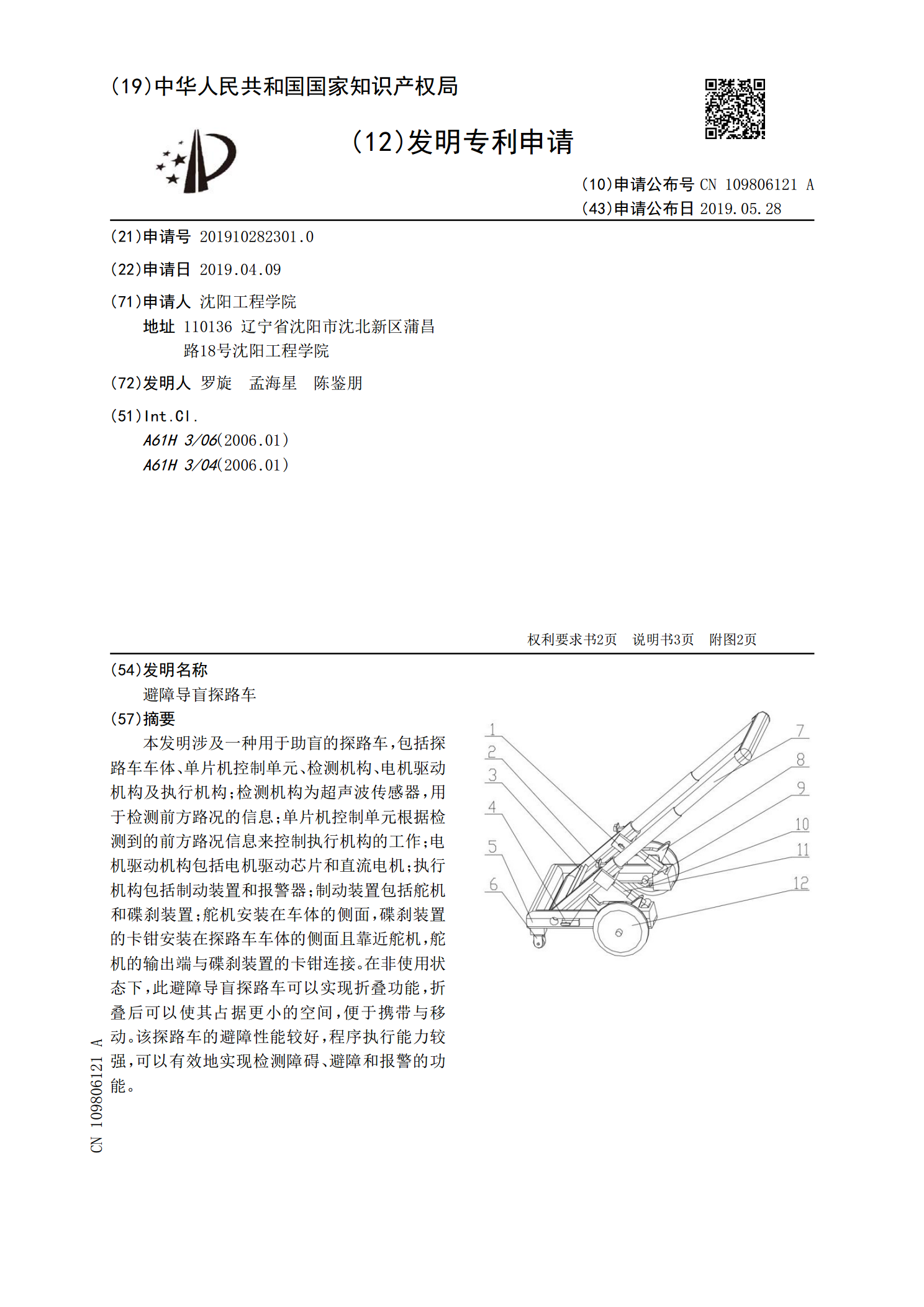
避障导盲探路车.pdf
本发明涉及一种用于助盲的探路车,包括探路车车体、单片机控制单元、检测机构、电机驱动机构及执行机构;检测机构为超声波传感器,用于检测前方路况的信息;单片机控制单元根据检测到的前方路况信息来控制执行机构的工作;电机驱动机构包括电机驱动芯片和直流电机;执行机构包括制动装置和报警器;制动装置包括舵机和碟刹装置;舵机安装在车体的侧面,碟刹装置的卡钳安装在探路车车体的侧面且靠近舵机,舵机的输出端与碟刹装置的卡钳连接。在非使用状态下,此避障导盲探路车可以实现折叠功能,折叠后可以使其占据更小的空间,便于携带与移动。该探路
盲人自动避障导盲杆.pdf
本发明公开了盲人自动避障导盲杆,包括车体,所述车体的下端处设有转向装置,该转向装置与车体配合连接;所述转向装置上设有多个滚轮;所述车体的上端处设有控制器,该控制器与车体配合连接,该控制器与转向装置电性连接;所述车体的一侧设有金属杆与车体通过连接轴配合连接;所述金属杆内设有电池组,该电池组的一侧设有定位装置,该定位装置与电池组电性连接;本发明使用方便,更安全,实用性好。