
基于角跟踪环路的GNSS天线阵接收机盲波束形成方法.pdf

文宣****66

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于角跟踪环路的GNSS天线阵接收机盲波束形成方法.pdf
本申请涉及一种基于角跟踪环路的GNSS天线阵接收机盲波束形成方法。所述方法包括:将逆矩阵与数字基带阵列信号进行相乘处理,得到干扰抑制后的数字基带信号;构造本地复制伪码信号,将每个阵元对应的干扰抑制后的数字基带信号与本地复制伪码信号进行计算,得到相关累加值矢量;根据角跟踪环路方法和相关累加值矢量进行跟踪处理,利用得到的导航信号DOA参数构造阵列权矢量,对阵列权矢量进行加权处理,得到阵列加权输出信号。采用本方法能够增强导航信号方向的波束。
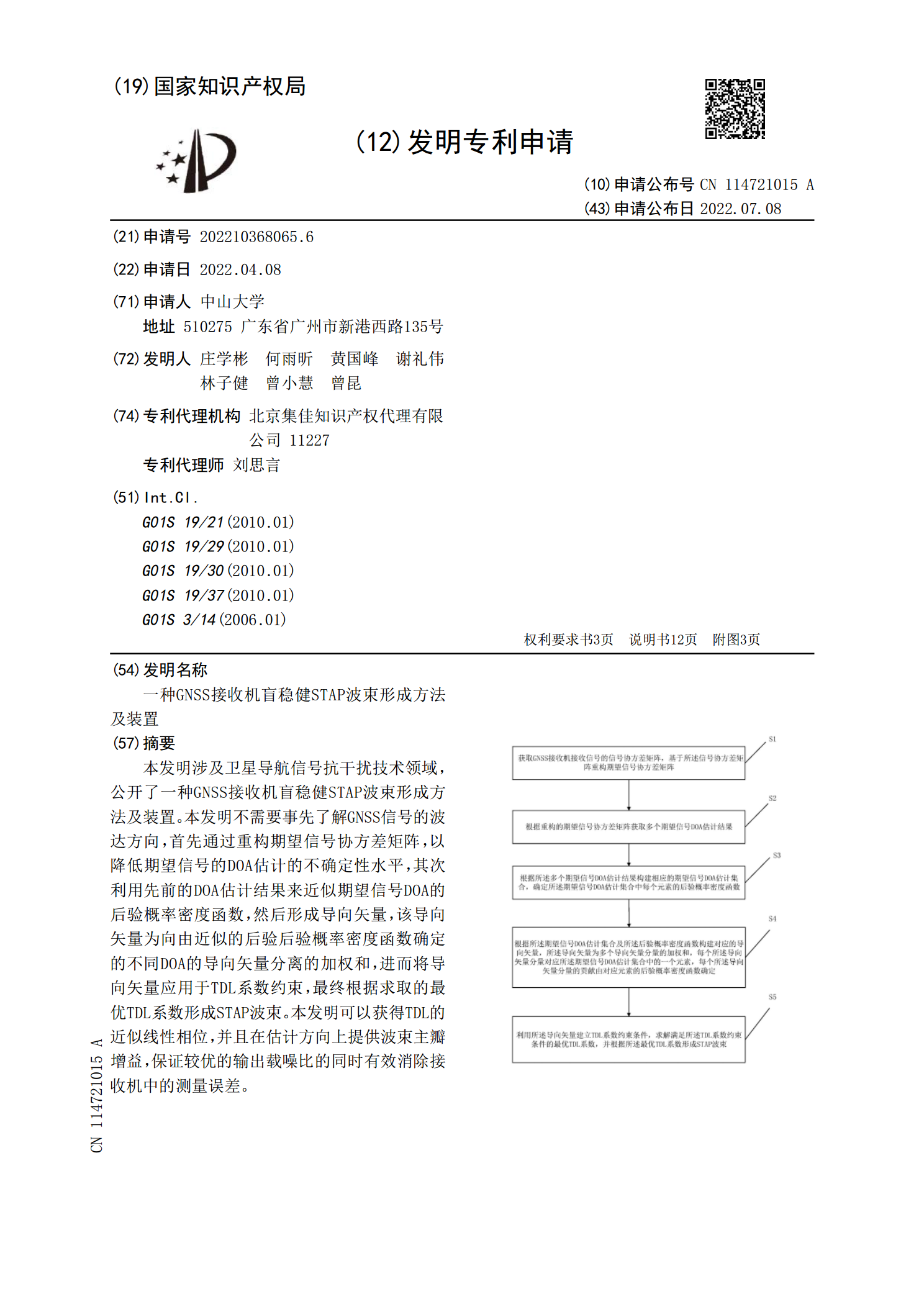
一种GNSS接收机盲稳健STAP波束形成方法及装置.pdf
本发明涉及卫星导航信号抗干扰技术领域,公开了一种GNSS接收机盲稳健STAP波束形成方法及装置。本发明不需要事先了解GNSS信号的波达方向,首先通过重构期望信号协方差矩阵,以降低期望信号的DOA估计的不确定性水平,其次利用先前的DOA估计结果来近似期望信号DOA的后验概率密度函数,然后形成导向矢量,该导向矢量为向由近似的后验后验概率密度函数确定的不同DOA的导向矢量分离的加权和,进而将导向矢量应用于TDL系数约束,最终根据求取的最优TDL系数形成STAP波束。本发明可以获得TDL的近似线性相位,并且在估计

一种卫星导航接收机盲波束形成方法.pdf
一种卫星导航接收机盲波束形成方法,属于阵列信号处理技术领域。该方法首先利用子空间投影方法将接收信号中的干扰进行抑制,然后利用多个传统的波束形成器对接收机阵列天线上方的整个半球面进行均匀指向覆盖,进一步增强接收的卫星信号,然后优先选取卫星信号载噪比高的一路波束进行卫星信号后续的跟踪。本发明不需要了解卫星信号的波达方向信息即可在卫星信号来向形成增益,在接收机捕获门限一定的情况下提高了接收的卫星信号的载噪比,从而提高了传统多波束接收机在冷启动阶段对卫星信号的捕获能力。
基于相控阵雷达的多波束低角跟踪方法.pptx
汇报人:目录PARTONEPARTTWO相控阵雷达工作原理相控阵雷达波束形成原理相控阵雷达多波束形成原理PARTTHREE多波束低角跟踪方法概述多波束低角跟踪方法实现流程多波束低角跟踪方法优势PARTFOUR系统总体设计硬件设计软件设计系统测试与验证PARTFIVE军事应用民用应用技术发展前景PARTSIX技术挑战解决方案技术发展趋势THANKYOU
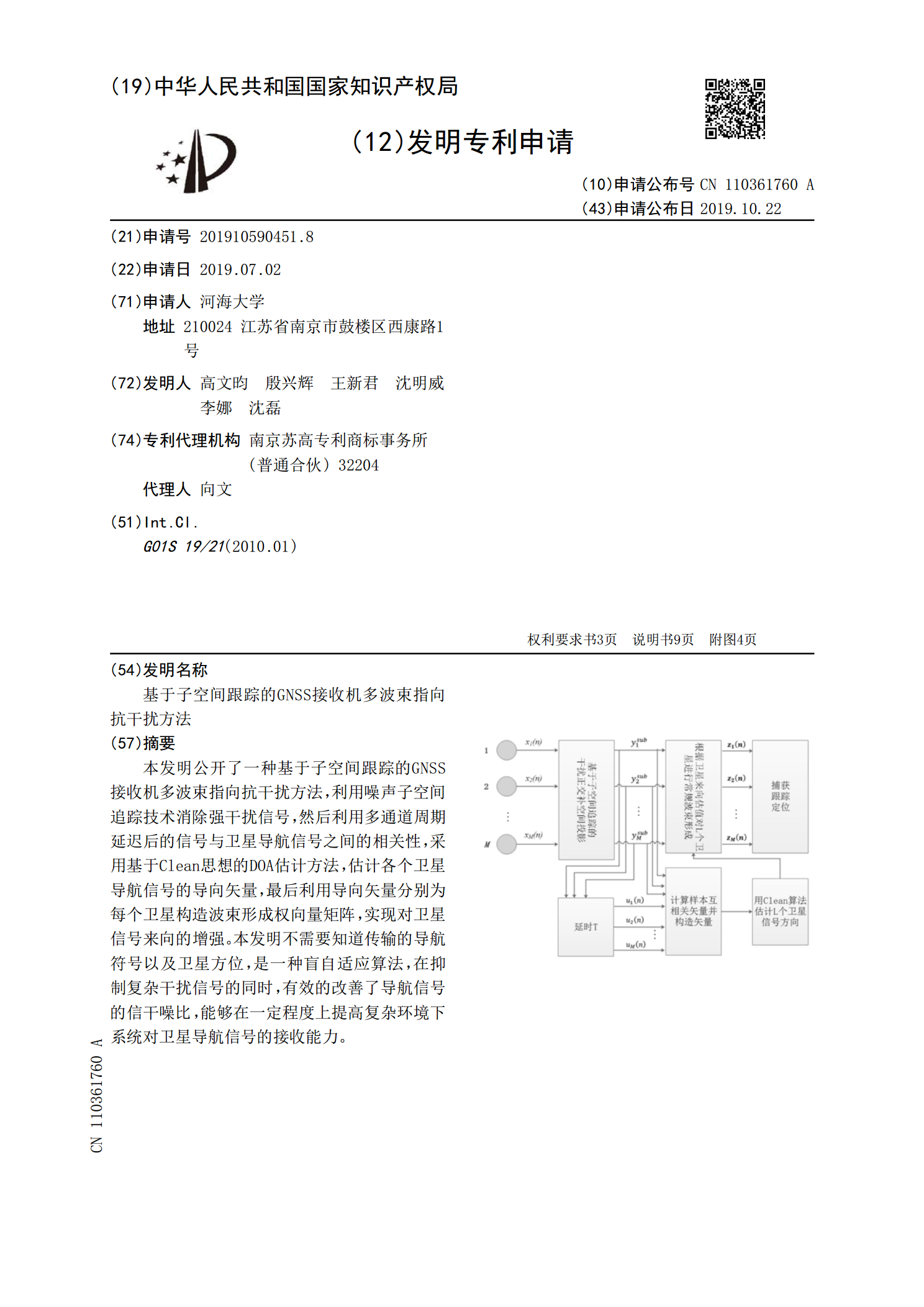
基于子空间跟踪的GNSS接收机多波束指向抗干扰方法.pdf
本发明公开了一种基于子空间跟踪的GNSS接收机多波束指向抗干扰方法,利用噪声子空间追踪技术消除强干扰信号,然后利用多通道周期延迟后的信号与卫星导航信号之间的相关性,采用基于Clean思想的DOA估计方法,估计各个卫星导航信号的导向矢量,最后利用导向矢量分别为每个卫星构造波束形成权向量矩阵,实现对卫星信号来向的增强。本发明不需要知道传输的导航符号以及卫星方位,是一种盲自适应算法,在抑制复杂干扰信号的同时,有效的改善了导航信号的信干噪比,能够在一定程度上提高复杂环境下系统对卫星导航信号的接收能力。