
一种基于人工鱼群算法的多UUV协同探测阵型优化方法.pdf

梦影****主a


1/10

2/10
3/10

4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于人工鱼群算法的多UUV协同探测阵型优化方法.pdf
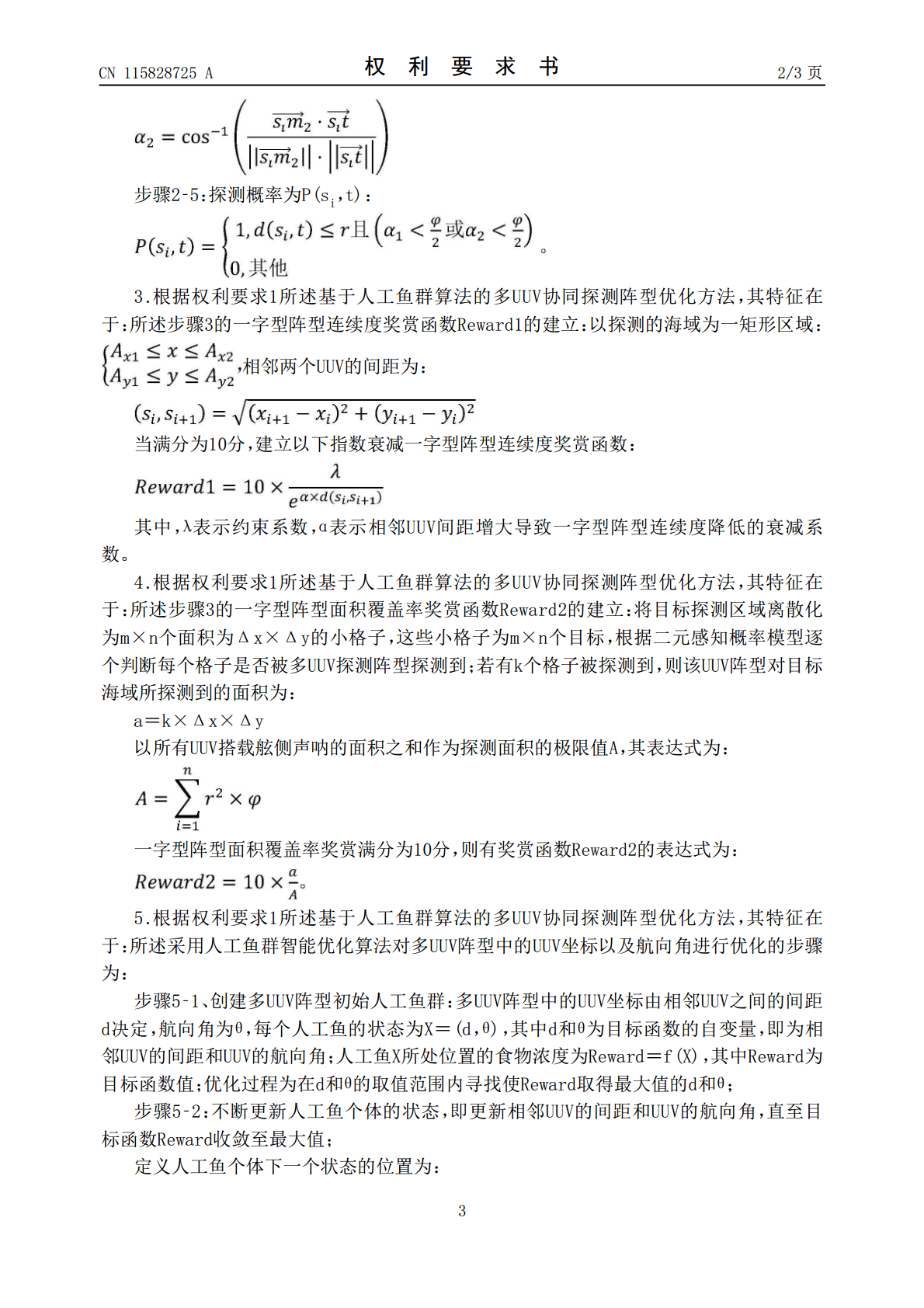
本发明涉及一种基于人工鱼群算法的多UUV协同探测阵型优化方法,建立一字型多UUV封控阵型,从舷侧声呐模型出发,通过改变相邻UUV之间的间距以及每个UUV的航向角,减小相邻UUV覆盖面积的交叠以及各UUV的探测盲区;通过建立二元感知模型,判断目标是否可以被探测;通过建立UUV阵型优化准则,提出封控阵型连续度与阵型覆盖面积加权奖赏机制,得到优化目标函数;最后,使用人工鱼群算法对目标函数进行参数优化,得到奖赏最大时的UUV间距以及航向角。本发明可快速获得探测效果更好的编队阵型,避免了计算复杂多元非线性函数极值的

面向协同探测的多UUV阵型构建与优化方法研究的任务书.docx
面向协同探测的多UUV阵型构建与优化方法研究的任务书一、课题背景近年来,随着水下机器人技术的飞速发展,多艘水下机器人(UUV)的协同探测对于海洋资源的勘探、深海探测等方面的研究具有重要的意义。在水中,水下机器人的通讯通道较为复杂,仅有有限的可以利用地面基站进行控制和数据传输,因此面向协同探测的多UUV阵型构建与优化是一项非常重要的任务。二、任务目标研究面向协同探测的多UUV阵型构建与优化方法,旨在提高UUV协同探测的效率,实现多UUV之间的通信协作,完成以下目标:1.基于水下通信模型,构建UUV的控制与数
基于混合优化算法的多UUV协同侦察任务分配方法研究.pptx
汇报人:/目录01混合优化算法的定义和原理混合优化算法的应用领域混合优化算法的优缺点02UUV侦察任务的特点和要求多UUV协同侦察任务分配的挑战任务分配问题的数学模型03混合优化算法的选择与设计任务分配问题的混合优化算法实现算法参数的调整与优化04实验数据集的选择与准备实验结果与分析与其他算法的比较与评估05基于混合优化算法的多UUV协同侦察任务分配方法的优势与局限性对未来研究的建议与展望汇报人:

基于人工鱼群算法的空洞探测.docx
基于人工鱼群算法的空洞探测一、引言空洞是指物理空间中的一些孤立或密度少的区域。在网络拓扑结构中,空洞是指网络拓扑结构中孤立的、或者连通性较差的网络节点。空洞在网络通信和信息传输中会导致数据包的丢失,从而影响网络的通信质量和性能。因此,准确地探测和有效地处理空洞问题对于网络性能的优化和改进是非常必要的。二、人工鱼群算法人工鱼群算法(ArtificialFishSwarmAlgorithm,AFSA)是一种基于群体智能的优化算法,主要模拟了鱼群在水中的行为和交互规律。人工鱼群算法具有自组织、自适应、并行性好、

基于M估计的多UUV协同定位算法.docx
基于M估计的多UUV协同定位算法标题:基于M估计的多UUV协同定位算法摘要:多无人水下航行器(UUV)协同定位是水下探测、救援和科学研究的关键技术之一。在水下环境中,由于信号传播受限和水下传感器的特性,UUV的位置估计通常存在误差。本文提出了一种基于M估计的多UUV协同定位算法,通过合理选择目标函数,通过迭代优化方法来提高位置估计准确性。实验结果表明,相比于传统的定位算法,该算法具有更好的定位精度和鲁棒性。1.引言无人水下航行器的协同定位技术是提高水下任务自主性和效率的关键技术之一。传统的UUV定位算法通