
机器人控制方法、装置以及数据处理方法、装置.pdf

雨巷****怡轩


1/10

2/10

3/10
4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共44页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
机器人控制方法、装置以及数据处理方法、装置.pdf
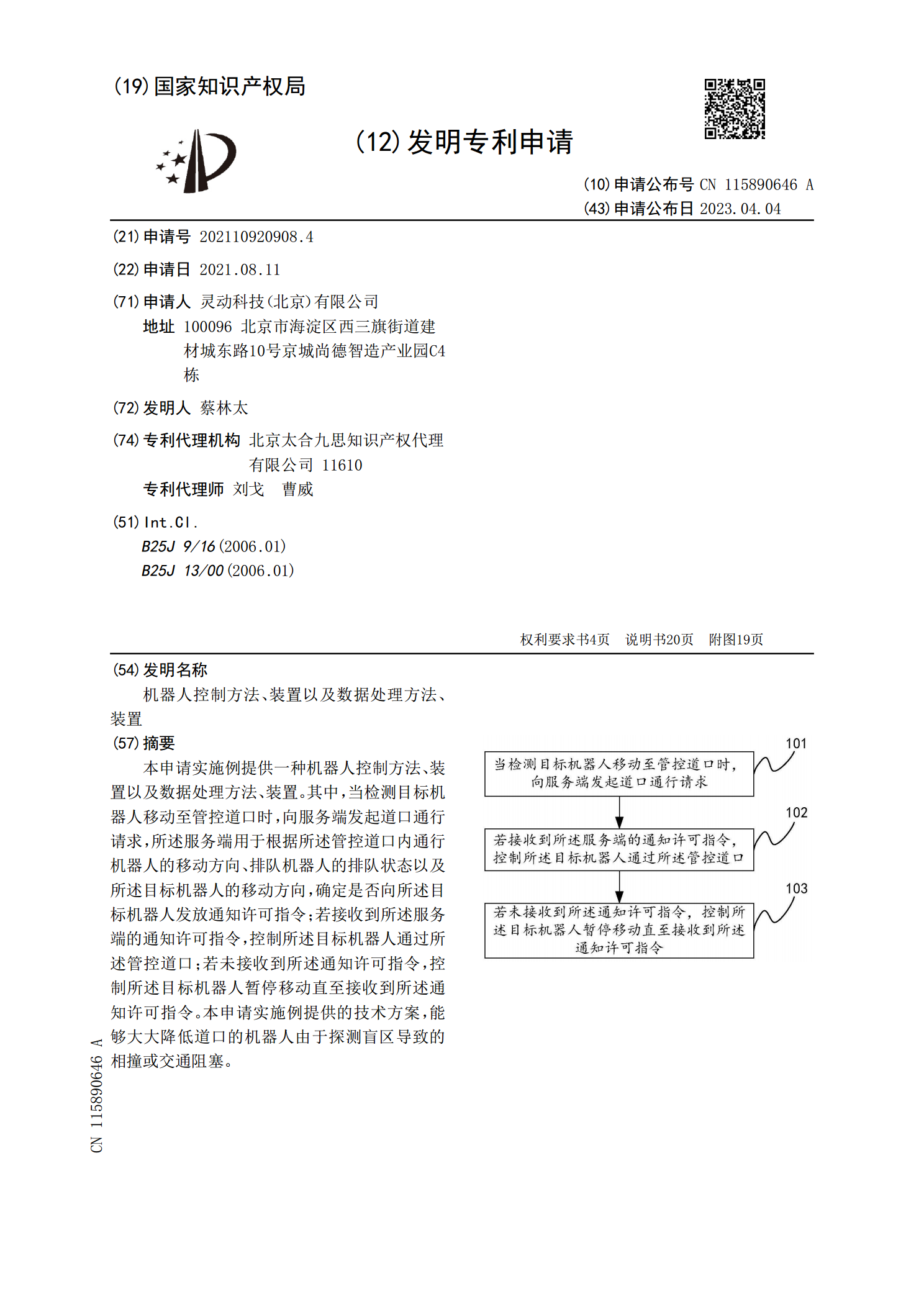
本申请实施例提供一种机器人控制方法、装置以及数据处理方法、装置。其中,当检测目标机器人移动至管控道口时,向服务端发起道口通行请求,所述服务端用于根据所述管控道口内通行机器人的移动方向、排队机器人的排队状态以及所述目标机器人的移动方向,确定是否向所述目标机器人发放通知许可指令;若接收到所述服务端的通知许可指令,控制所述目标机器人通过所述管控道口;若未接收到所述通知许可指令,控制所述目标机器人暂停移动直至接收到所述通知许可指令。本申请实施例提供的技术方案,能够大大降低道口的机器人由于探测盲区导致的相撞或交通阻
存储控制方法及装置、数据处理方法及装置以及存储介质.pdf
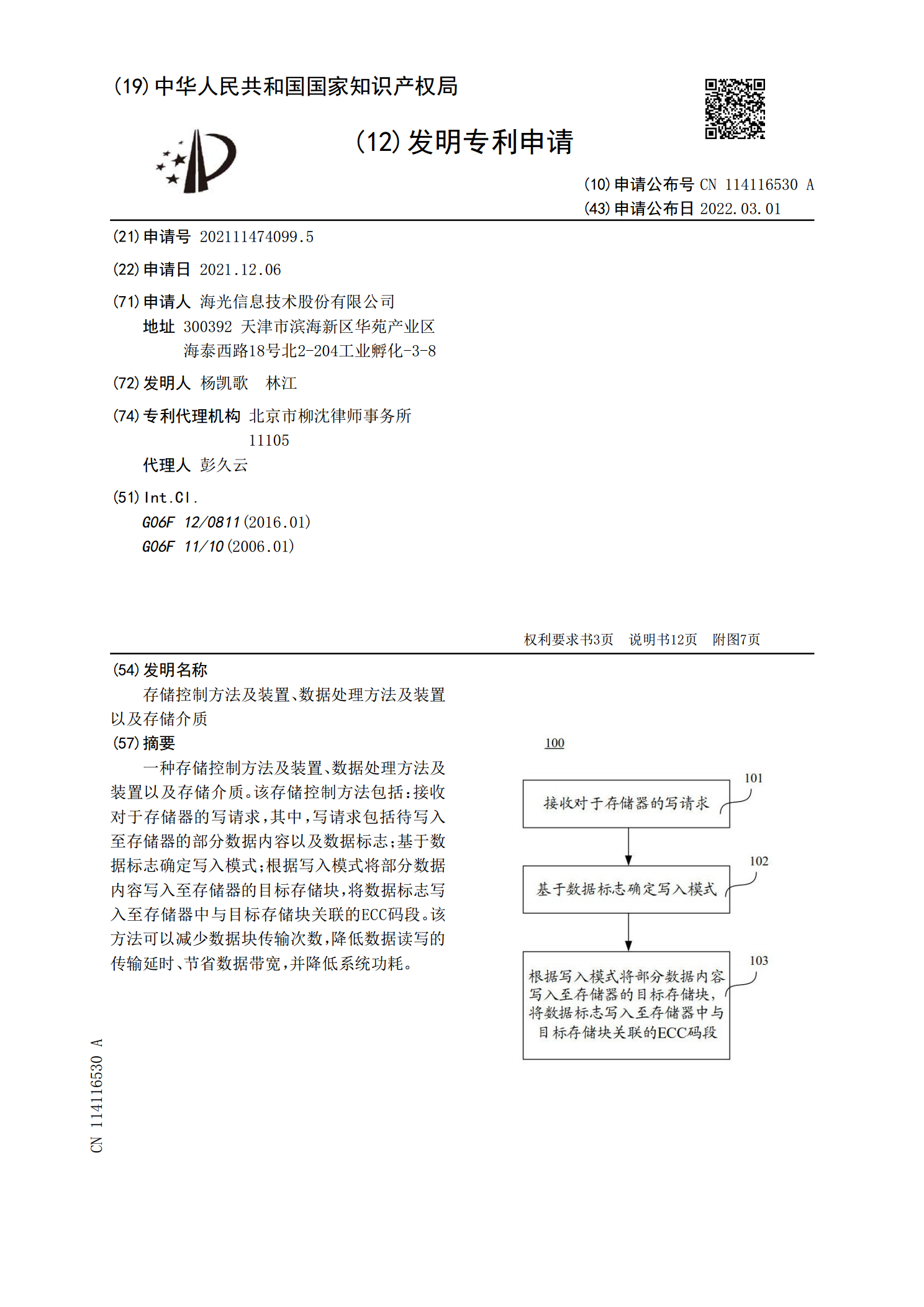
一种存储控制方法及装置、数据处理方法及装置以及存储介质。该存储控制方法包括:接收对于存储器的写请求,其中,写请求包括待写入至存储器的部分数据内容以及数据标志;基于数据标志确定写入模式;根据写入模式将部分数据内容写入至存储器的目标存储块,将数据标志写入至存储器中与目标存储块关联的ECC码段。该方法可以减少数据块传输次数,降低数据读写的传输延时、节省数据带宽,并降低系统功耗。
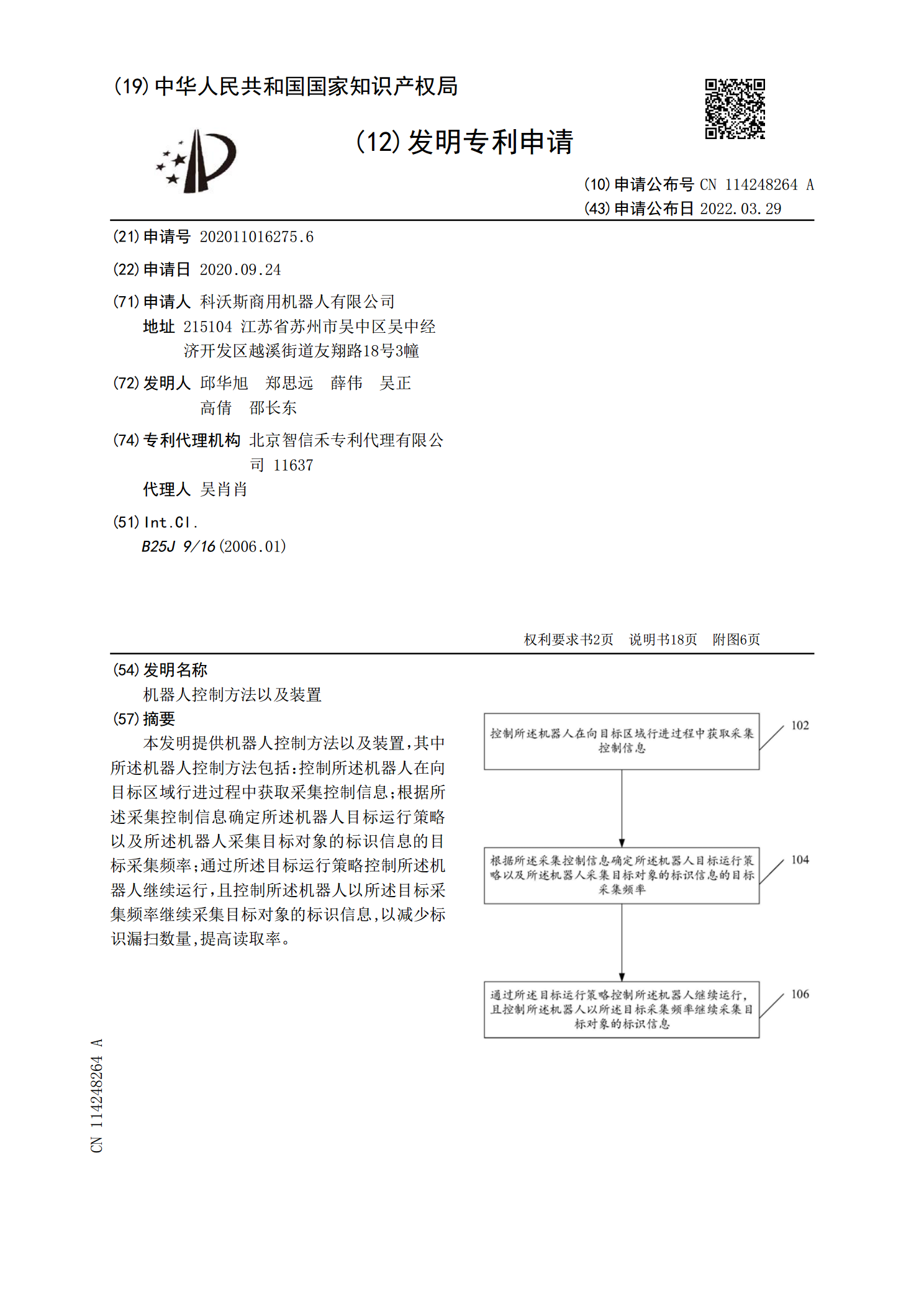
机器人控制方法以及装置.pdf
本发明提供机器人控制方法以及装置,其中所述机器人控制方法包括:控制所述机器人在向目标区域行进过程中获取采集控制信息;根据所述采集控制信息确定所述机器人目标运行策略以及所述机器人采集目标对象的标识信息的目标采集频率;通过所述目标运行策略控制所述机器人继续运行,且控制所述机器人以所述目标采集频率继续采集目标对象的标识信息,以减少标识漏扫数量,提高读取率。

数据处理方法以及装置.pdf
本说明书实施例提供数据处理方法以及装置,其中数据处理方法应用于第一处理端,包括:确定若干个目标对象和目标对象各自对应的多个处理算子,其中,目标对象携带针对多个处理算子的执行序列,每个处理算子对应一个数据队列,处理算子为对目标对象的特征向量进行降维处理的算子;在对目标对象执行任一处理算子的情况下,冻结目标对象,并将目标对象添加至任一处理算子对应的数据队列;从任一数据队列中提取多个目标对象,并将多个目标对象发送至第二处理端,使第二处理端对多个目标对象并发执行任一数据队列对应的处理算子;接收第二处理端反馈的处理
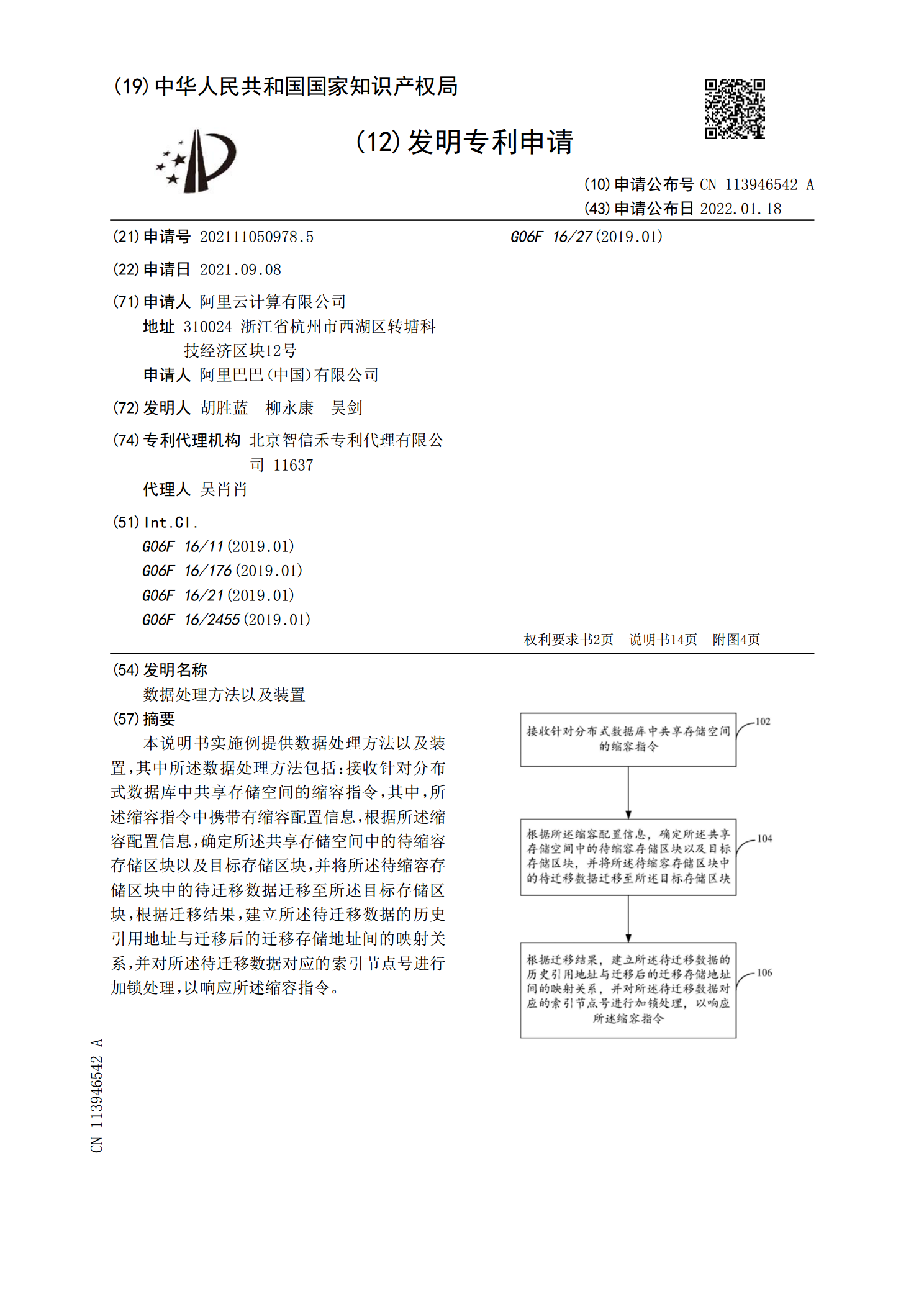
数据处理方法以及装置.pdf
本说明书实施例提供数据处理方法以及装置,其中所述数据处理方法包括:接收针对分布式数据库中共享存储空间的缩容指令,其中,所述缩容指令中携带有缩容配置信息,根据所述缩容配置信息,确定所述共享存储空间中的待缩容存储区块以及目标存储区块,并将所述待缩容存储区块中的待迁移数据迁移至所述目标存储区块,根据迁移结果,建立所述待迁移数据的历史引用地址与迁移后的迁移存储地址间的映射关系,并对所述待迁移数据对应的索引节点号进行加锁处理,以响应所述缩容指令。