
一种基于地磁场和信号强度的定位跟随方法.pdf

俊英****22

1/6
2/6

3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于地磁场和信号强度的定位跟随方法.pdf
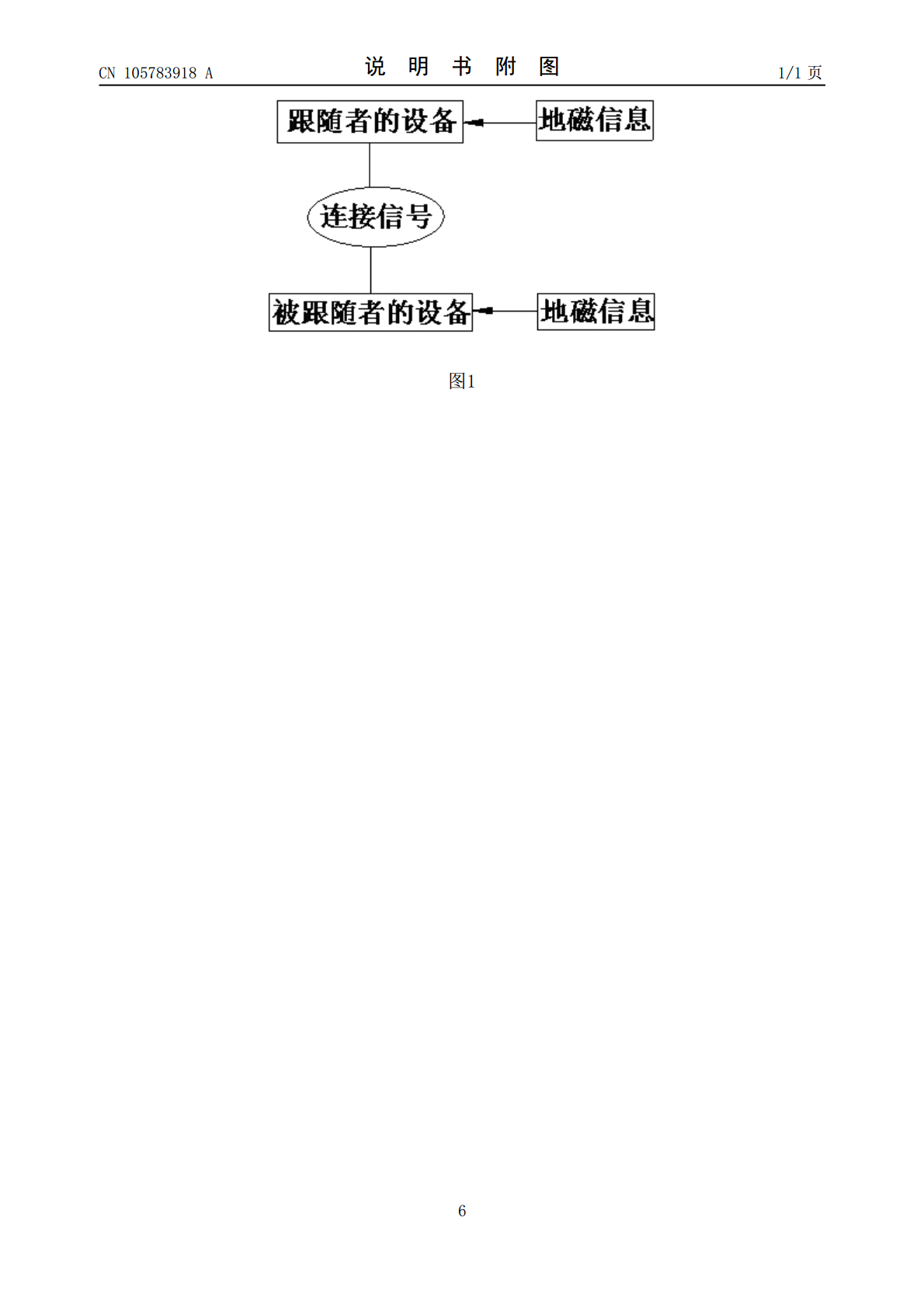
本发明涉及机器人导航技术领域,尤其是指一种基于地磁场和信号强度的定位跟随方法:该方法包括以下步骤:(1)跟随者的设备与被跟随者的设备分别收集地磁信息,被跟随者的设备将收集到的地磁信息传送到跟随者的设备;(2)跟随者的设备分别处理自身收集到的地磁信息以及被跟随者传送来的地磁信息,然后将处理后的跟随者的地磁信息和被跟随者的地磁信息进行比对,从而计算出跟随者的前进方向;(3)被跟随者根据与跟随者之间的连接信号的强弱计算出自身与跟随者的距离,结合设定的时间,从而计算出跟随者的前进速度;(4)跟随者根据步骤(2)和
一种基于信号强度的定位方法、系统和智能服装.pdf
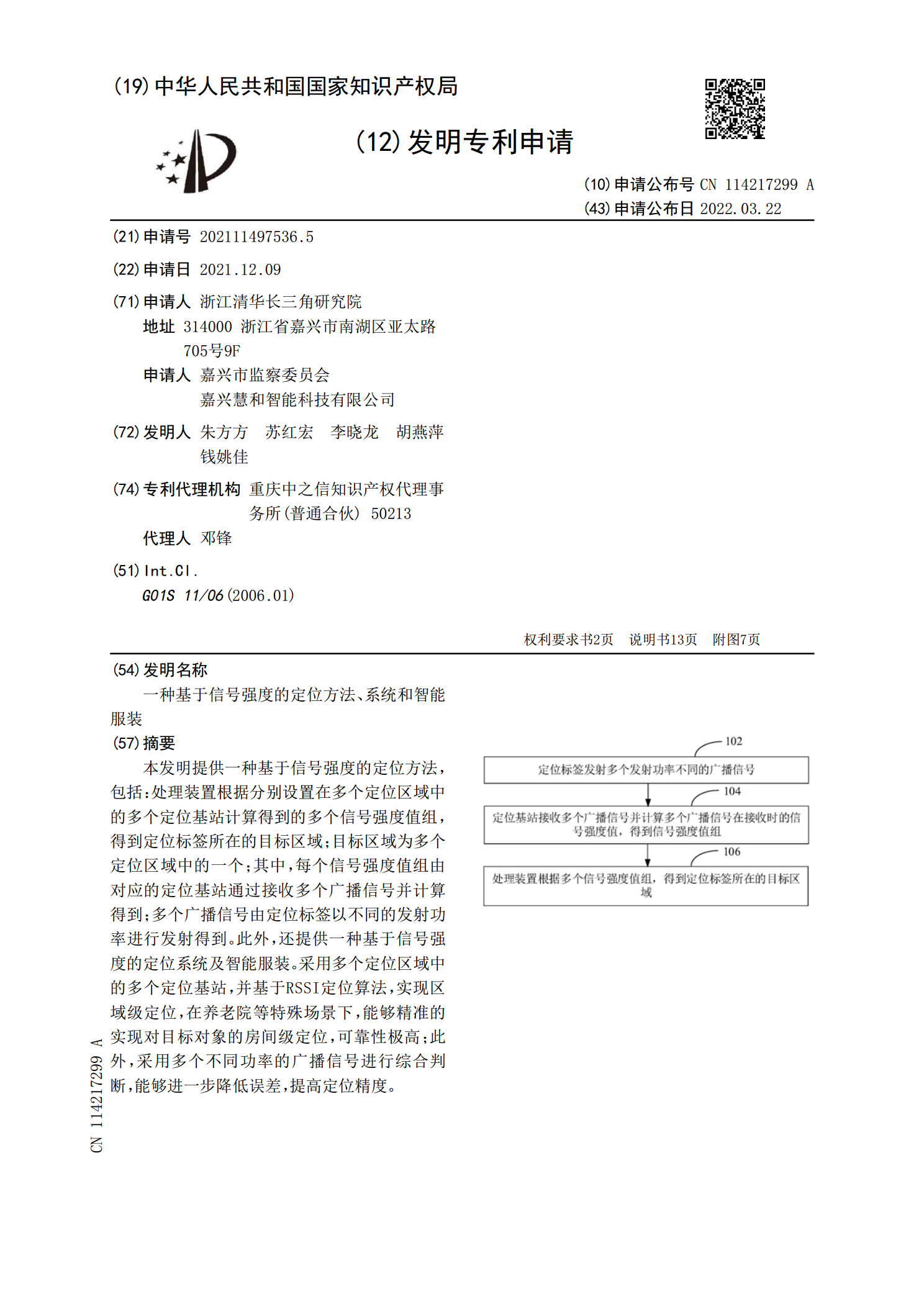
本发明提供一种基于信号强度的定位方法,包括:处理装置根据分别设置在多个定位区域中的多个定位基站计算得到的多个信号强度值组,得到定位标签所在的目标区域;目标区域为多个定位区域中的一个;其中,每个信号强度值组由对应的定位基站通过接收多个广播信号并计算得到;多个广播信号由定位标签以不同的发射功率进行发射得到。此外,还提供一种基于信号强度的定位系统及智能服装。采用多个定位区域中的多个定位基站,并基于RSSI定位算法,实现区域级定位,在养老院等特殊场景下,能够精准的实现对目标对象的房间级定位,可靠性极高;此外,采用

基于GPS和GSM的车辆智能定位与跟随研究.docx
基于GPS和GSM的车辆智能定位与跟随研究标题:基于GPS和GSM的车辆智能定位与跟随研究摘要:随着社会的不断发展和技术的快速进步,车辆定位与跟随系统在交通管理、车辆导航和物流运输等领域中的应用需求越来越重要。本文基于GPS和GSM技术,研究了一种车辆智能定位与跟随系统的方法。通过分析GPS和GSM的原理及特点,设计了系统的硬件框架和软件算法,并进行了实验验证。实验结果表明,该系统能够精确地定位车辆的位置并实现车辆的智能跟随,具有良好的实用性和效果。一、引言车辆定位与跟随技术在交通管理、车辆导航和物流运输
基于WiFi信号强度和生成对抗网络的室内定位方法.pdf
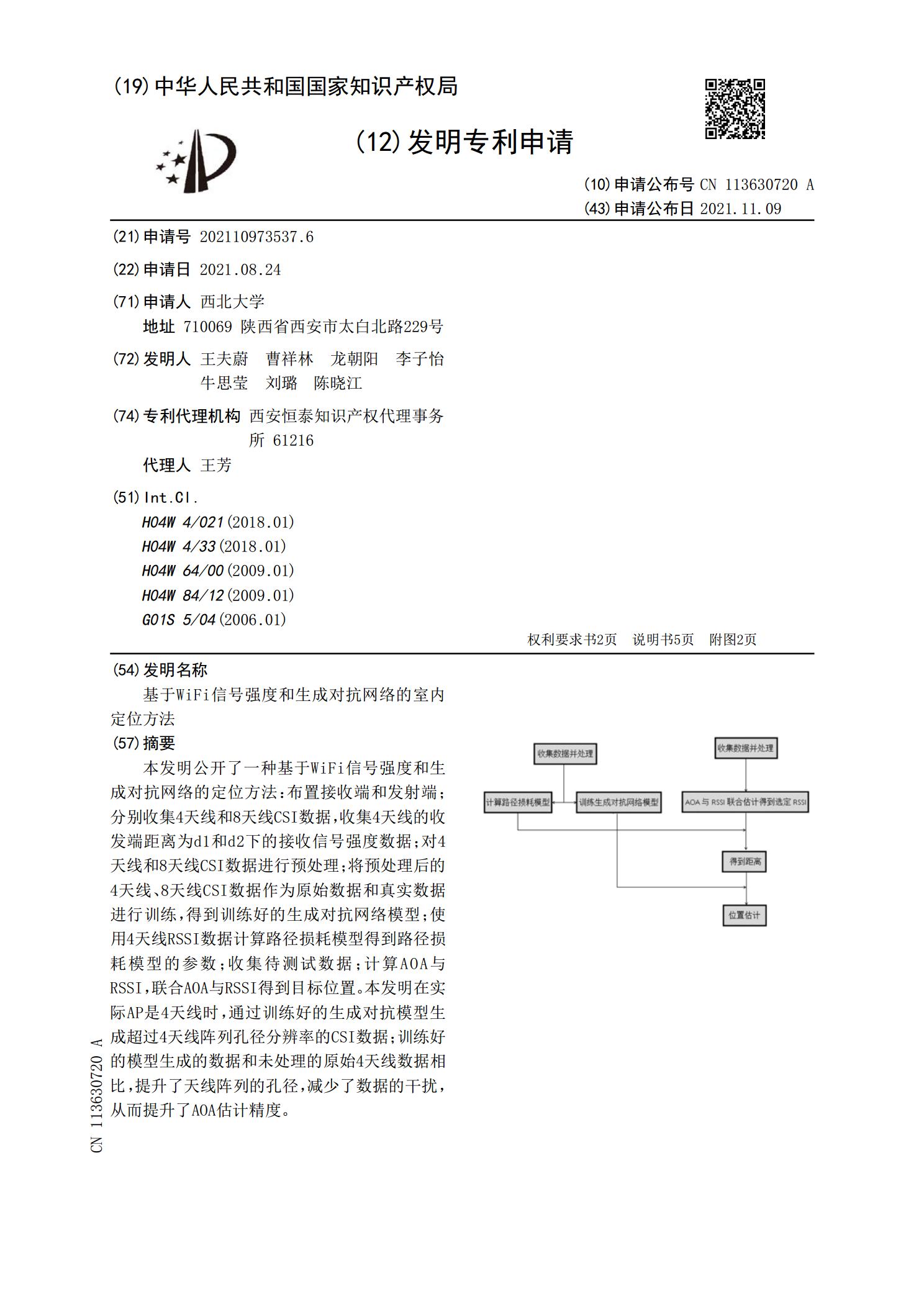
本发明公开了一种基于WiFi信号强度和生成对抗网络的定位方法:布置接收端和发射端;分别收集4天线和8天线CSI数据,收集4天线的收发端距离为d1和d2下的接收信号强度数据;对4天线和8天线CSI数据进行预处理;将预处理后的4天线、8天线CSI数据作为原始数据和真实数据进行训练,得到训练好的生成对抗网络模型;使用4天线RSSI数据计算路径损耗模型得到路径损耗模型的参数;收集待测试数据;计算AOA与RSSI,联合AOA与RSSI得到目标位置。本发明在实际AP是4天线时,通过训练好的生成对抗模型生成超过4天线阵

基于信号强度的定位技术分析.docx
基于信号强度的定位技术分析基于信号强度的定位技术分析摘要:随着无线通信的普及和发展,利用基于信号强度的定位技术成为了室内和室外定位的主要方法之一。本文将对基于信号强度的定位技术进行分析,包括其原理、应用及存在的问题。一、引言随着移动互联网的快速发展,人们对于位置服务的需求越来越高。定位技术的精确性和效率直接关系到人们的生活和工作质量。基于信号强度的定位技术通过测量接收到的信号强度来确定定位的位置,广泛应用于室内导航、商场推广、无线传感器网络等领域。二、基于信号强度的定位技术原理基于信号强度的定位技术利用无