
一种轮履结合辅助搬运爬楼梯机器人.pdf

努力****元恺

1/8
2/8
3/8

4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种轮履结合辅助搬运爬楼梯机器人.pdf
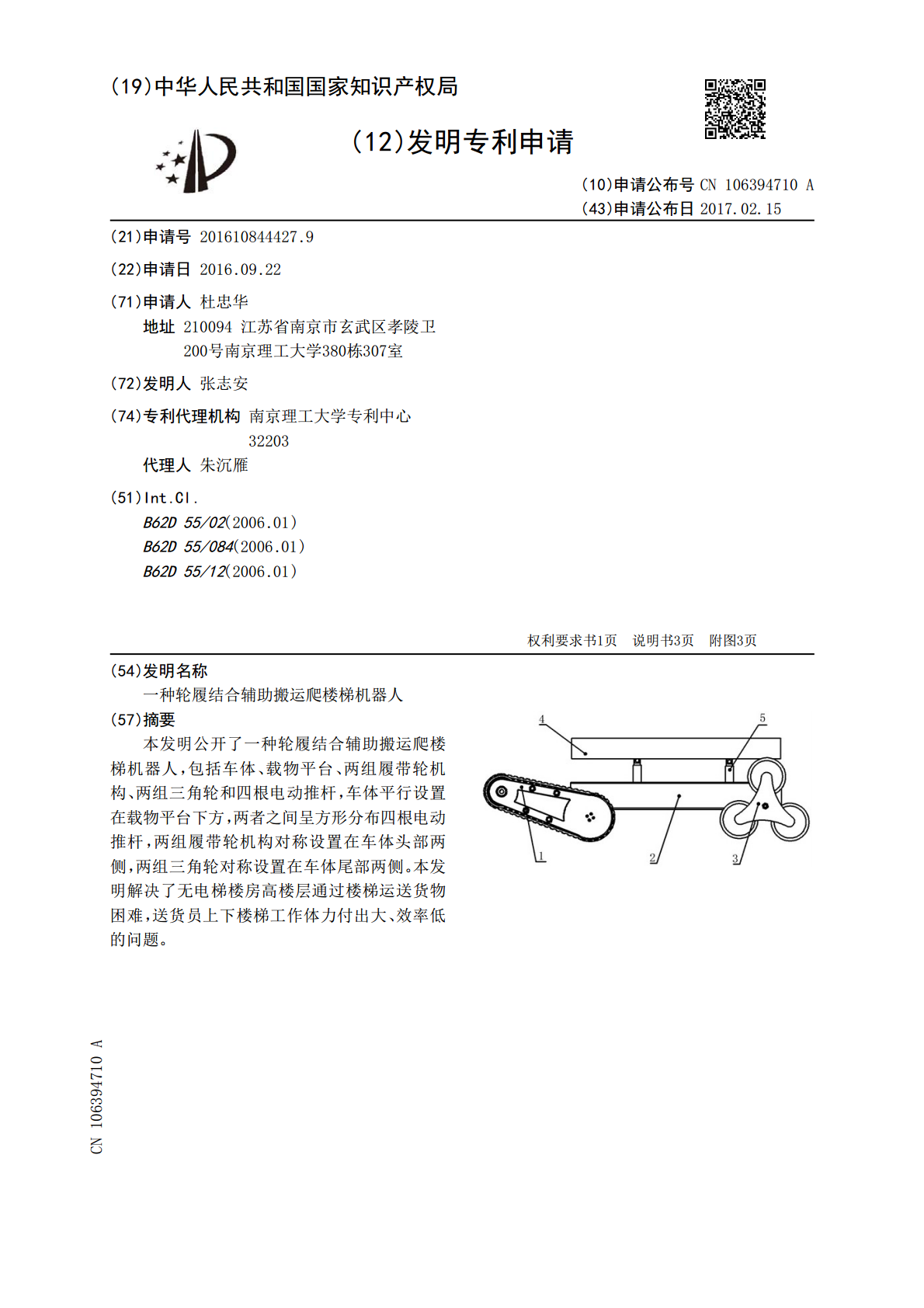
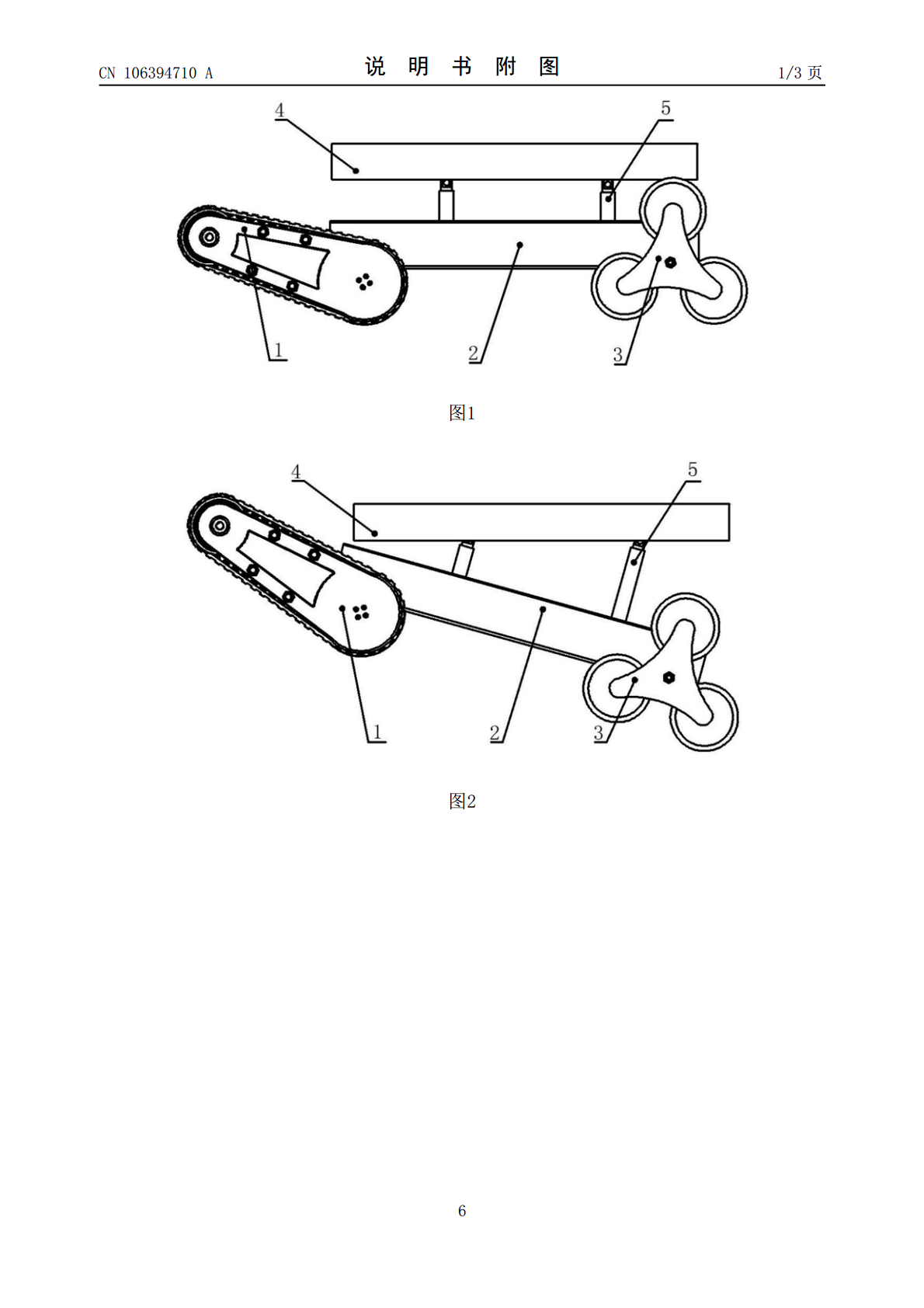
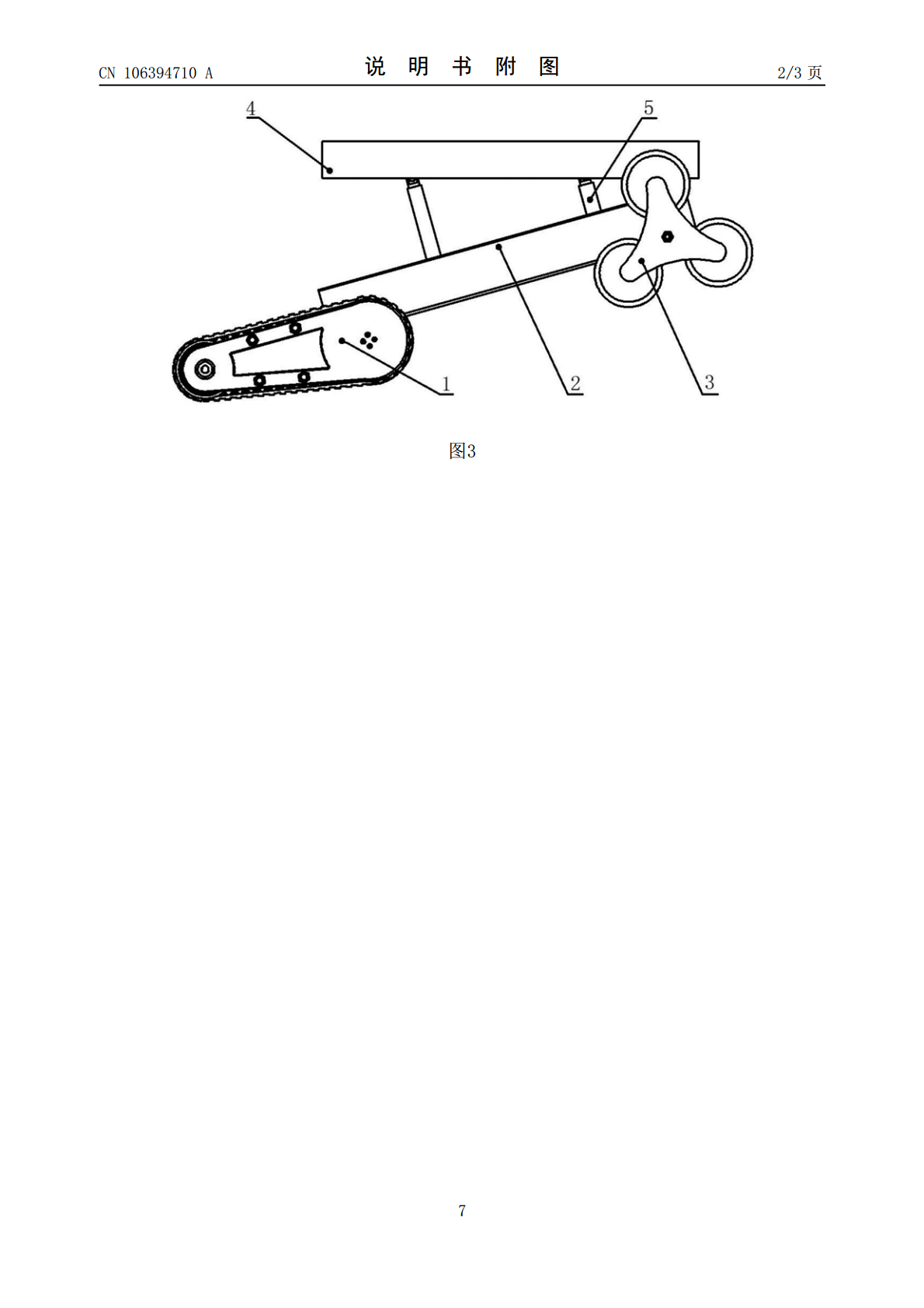
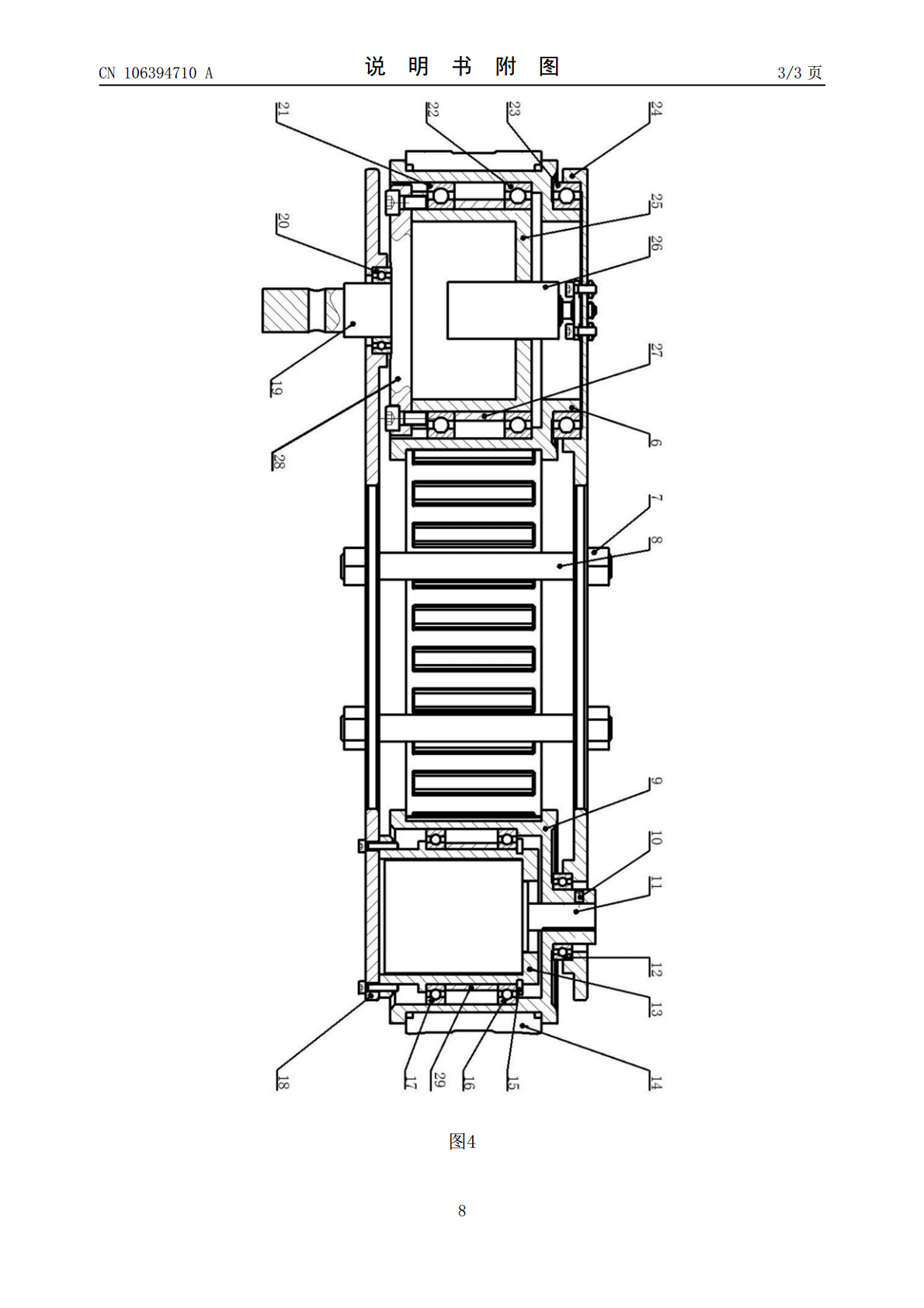
本发明公开了一种轮履结合辅助搬运爬楼梯机器人,包括车体、载物平台、两组履带轮机构、两组三角轮和四根电动推杆,车体平行设置在载物平台下方,两者之间呈方形分布四根电动推杆,两组履带轮机构对称设置在车体头部两侧,两组三角轮对称设置在车体尾部两侧。本发明解决了无电梯楼房高楼层通过楼梯运送货物困难,送货员上下楼梯工作体力付出大、效率低的问题。
辅助爬楼梯搬运装置.pdf
本发明公开了一种辅助爬楼梯搬运装置,包括机架,所述机架上设有安装箱和拉杆,所述安装箱内安装有电机,所述电机连接主动曲柄,所述主动曲柄转动连接推杆,所述推杆上设置有滑槽,所述滑槽内卡设有圆柱杆,所述机架底部设置有滑轮。本发明结构简单,可用装置运输物品,搬运省力方便,提高了效率,可实现多种速度的上下楼搬运,适用性好。

一种智能爬楼梯行李搬运辅助设备.pdf
本发明公开了一种智能爬楼梯行李搬运辅助设备,包括楼梯架,以及沿所述楼梯架倾斜方向安装在楼梯架侧壁上的环形导轨;所述楼梯架的侧壁上在环形导轨两端的内侧分别安装有主动链轮和从动链轮,所述主动链轮和从动链轮之间安装有传动链条,所述楼梯架的内侧壁上安装有用于驱动主动链轮转动的蜗轮蜗杆减速机;所述环形导轨上滑动连接有由所述传动链条驱动的滑块组件,所述滑块组件上安装有吊盘组件,所述吊盘组件上安装有用于放置行李物品的行李架组件;该智能爬楼梯行李搬运辅助设备结构简单,用于辅助人们上下楼梯搬运行李,可实现搬运过程自动化进行
一种智能搬运辅助机器人.pdf
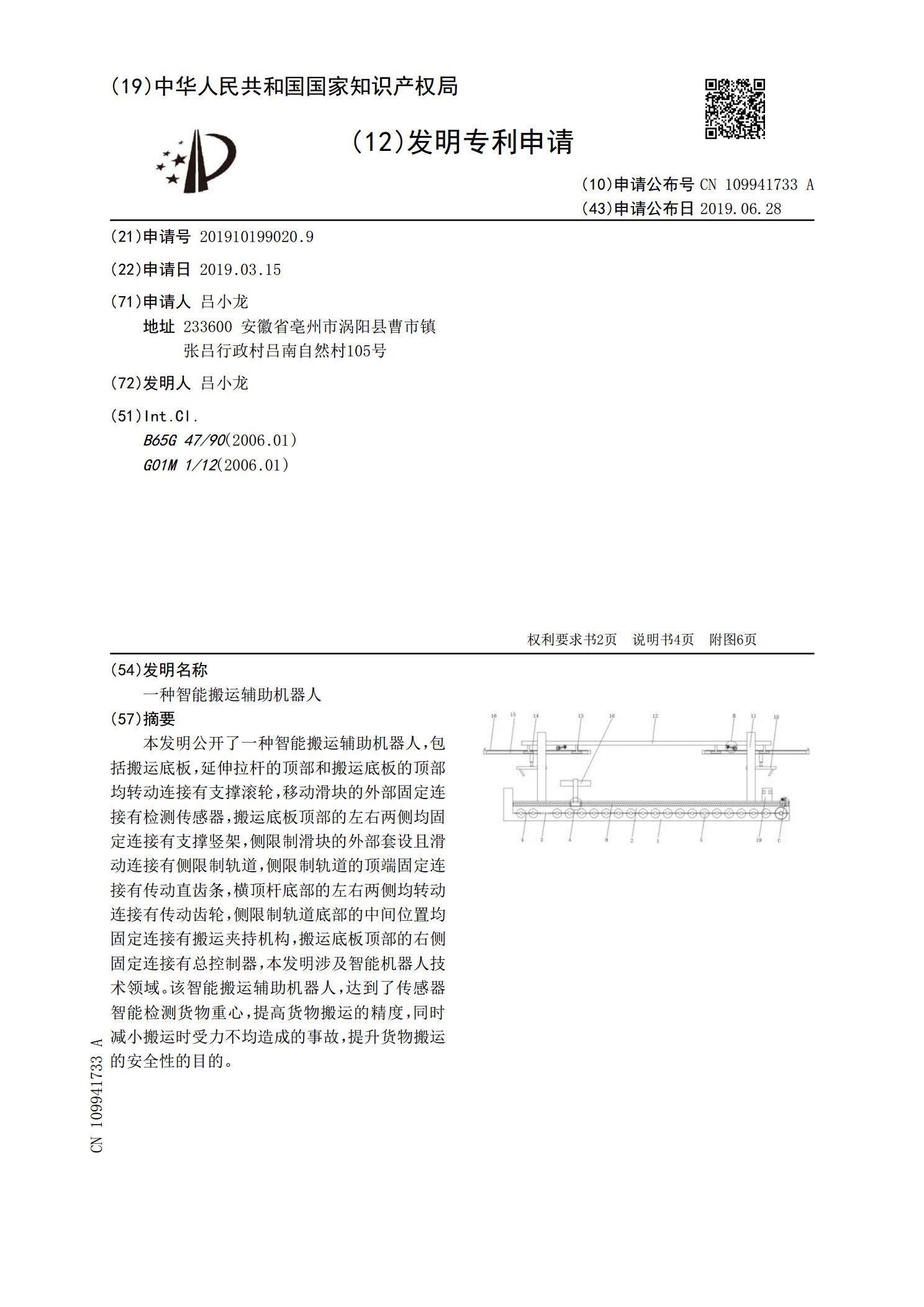
本发明公开了一种智能搬运辅助机器人,包括搬运底板,延伸拉杆的顶部和搬运底板的顶部均转动连接有支撑滚轮,移动滑块的外部固定连接有检测传感器,搬运底板顶部的左右两侧均固定连接有支撑竖架,侧限制滑块的外部套设且滑动连接有侧限制轨道,侧限制轨道的顶端固定连接有传动直齿条,横顶杆底部的左右两侧均转动连接有传动齿轮,侧限制轨道底部的中间位置均固定连接有搬运夹持机构,搬运底板顶部的右侧固定连接有总控制器,本发明涉及智能机器人技术领域。该智能搬运辅助机器人,达到了传感器智能检测货物重心,提高货物搬运的精度,同时减小搬运时
一种辅助式搬运机器人.pdf
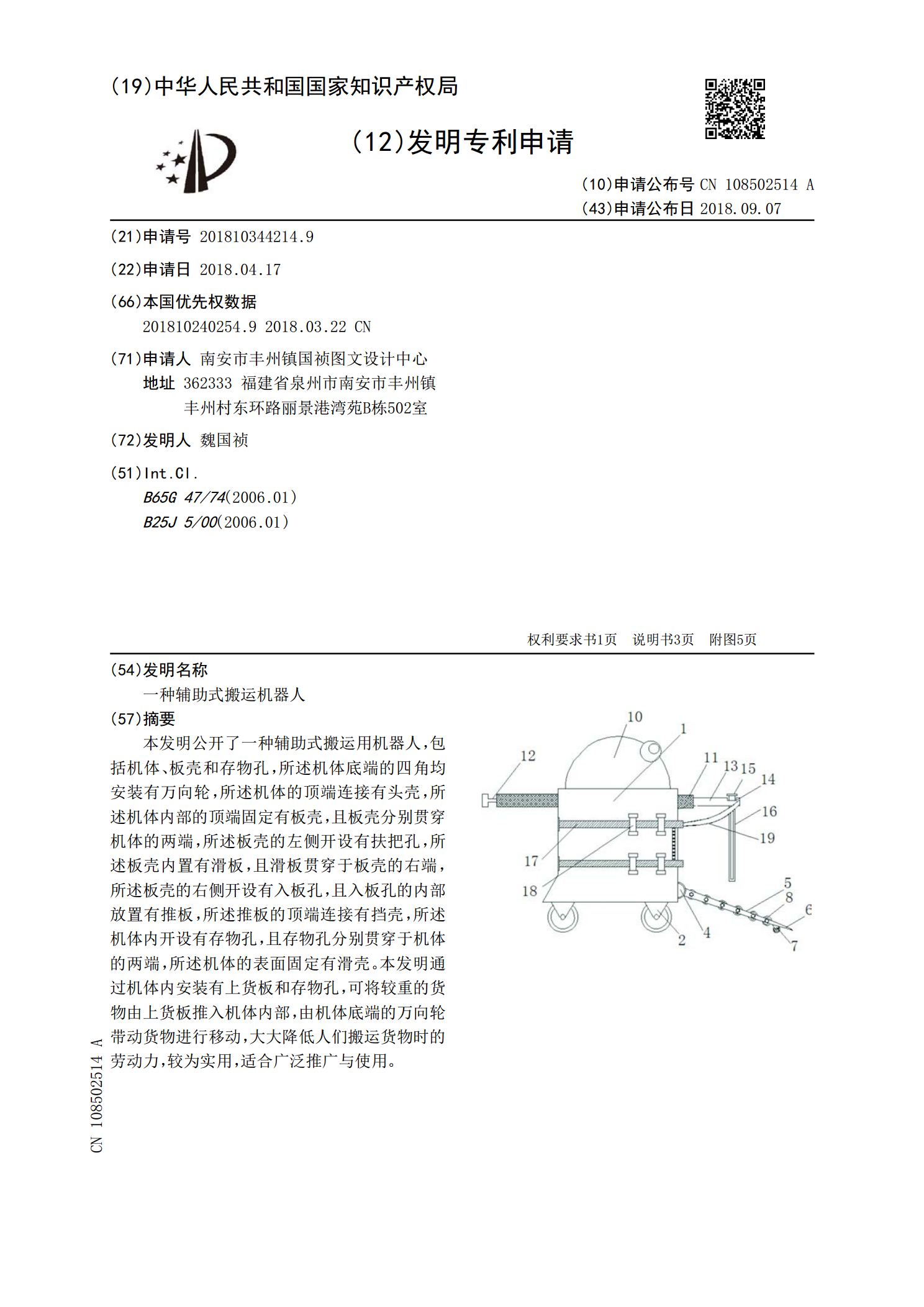
本发明公开了一种辅助式搬运用机器人,包括机体、板壳和存物孔,所述机体底端的四角均安装有万向轮,所述机体的顶端连接有头壳,所述机体内部的顶端固定有板壳,且板壳分别贯穿机体的两端,所述板壳的左侧开设有扶把孔,所述板壳内置有滑板,且滑板贯穿于板壳的右端,所述板壳的右侧开设有入板孔,且入板孔的内部放置有推板,所述推板的顶端连接有挡壳,所述机体内开设有存物孔,且存物孔分别贯穿于机体的两端,所述机体的表面固定有滑壳。本发明通过机体内安装有上货板和存物孔,可将较重的货物由上货板推入机体内部,由机体底端的万向轮带动货物进