
基于二维码的视觉导引车定位方法及视觉导引车.pdf

绮兰****文章

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于二维码的视觉导引车定位方法及视觉导引车.pdf
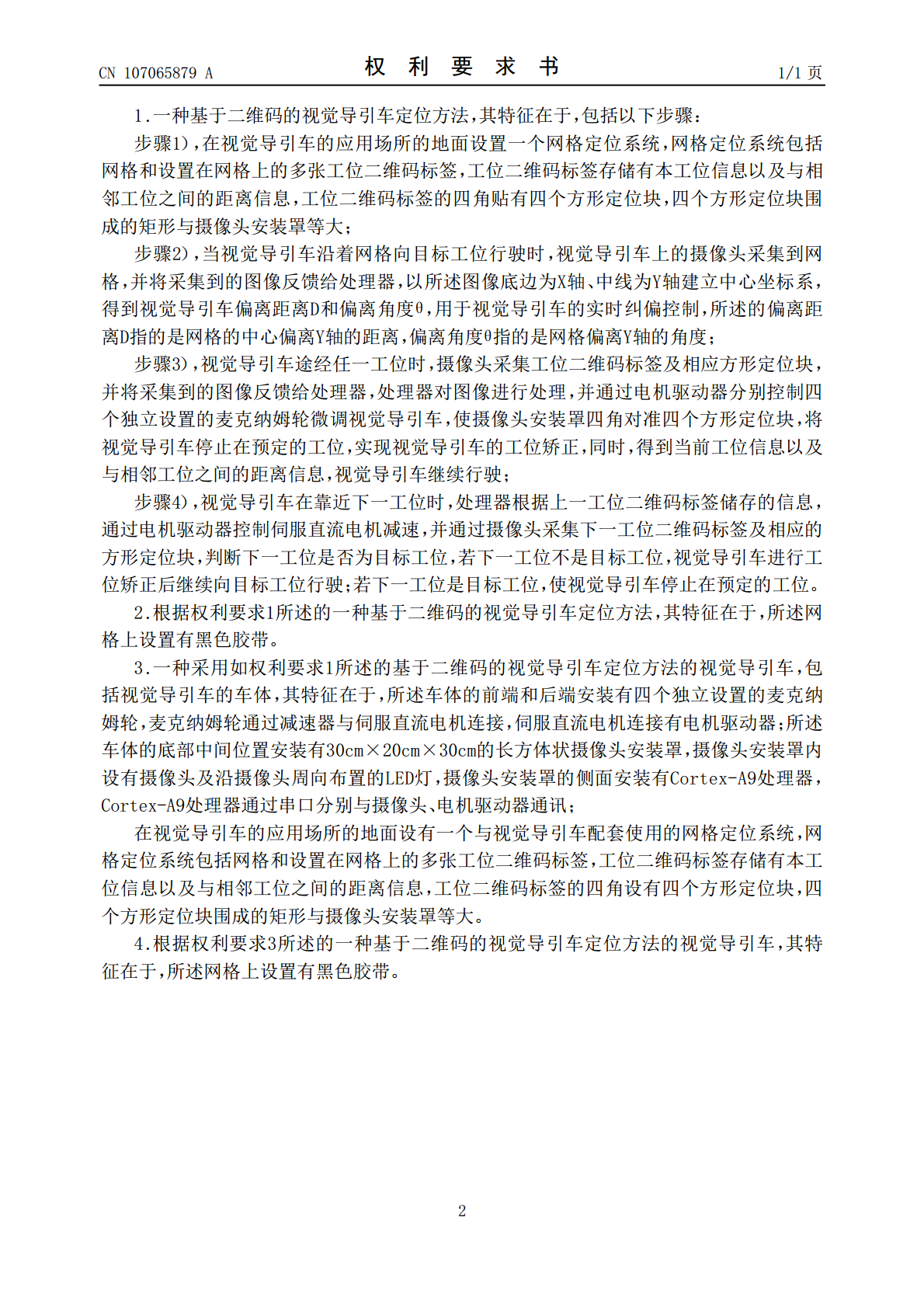
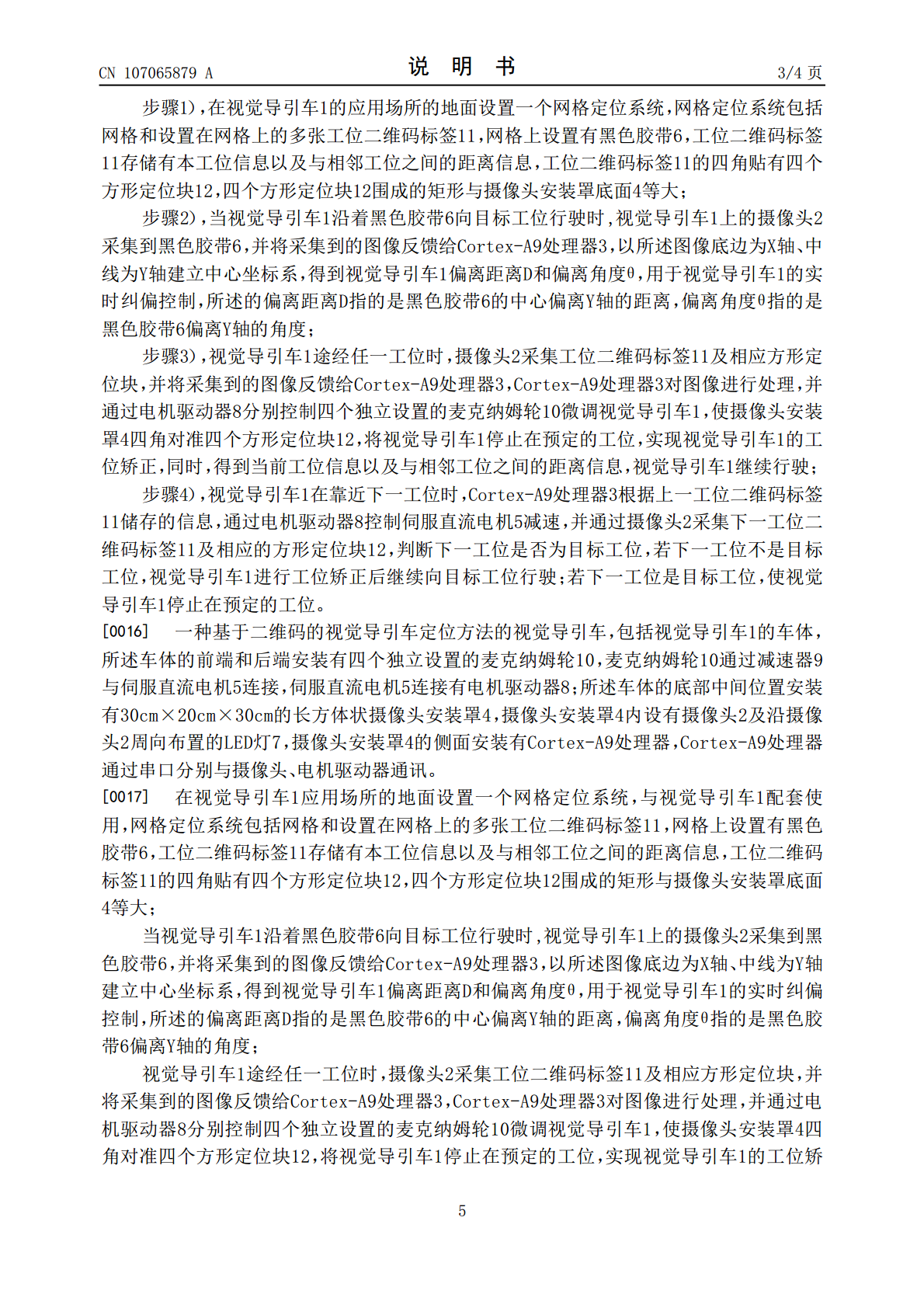
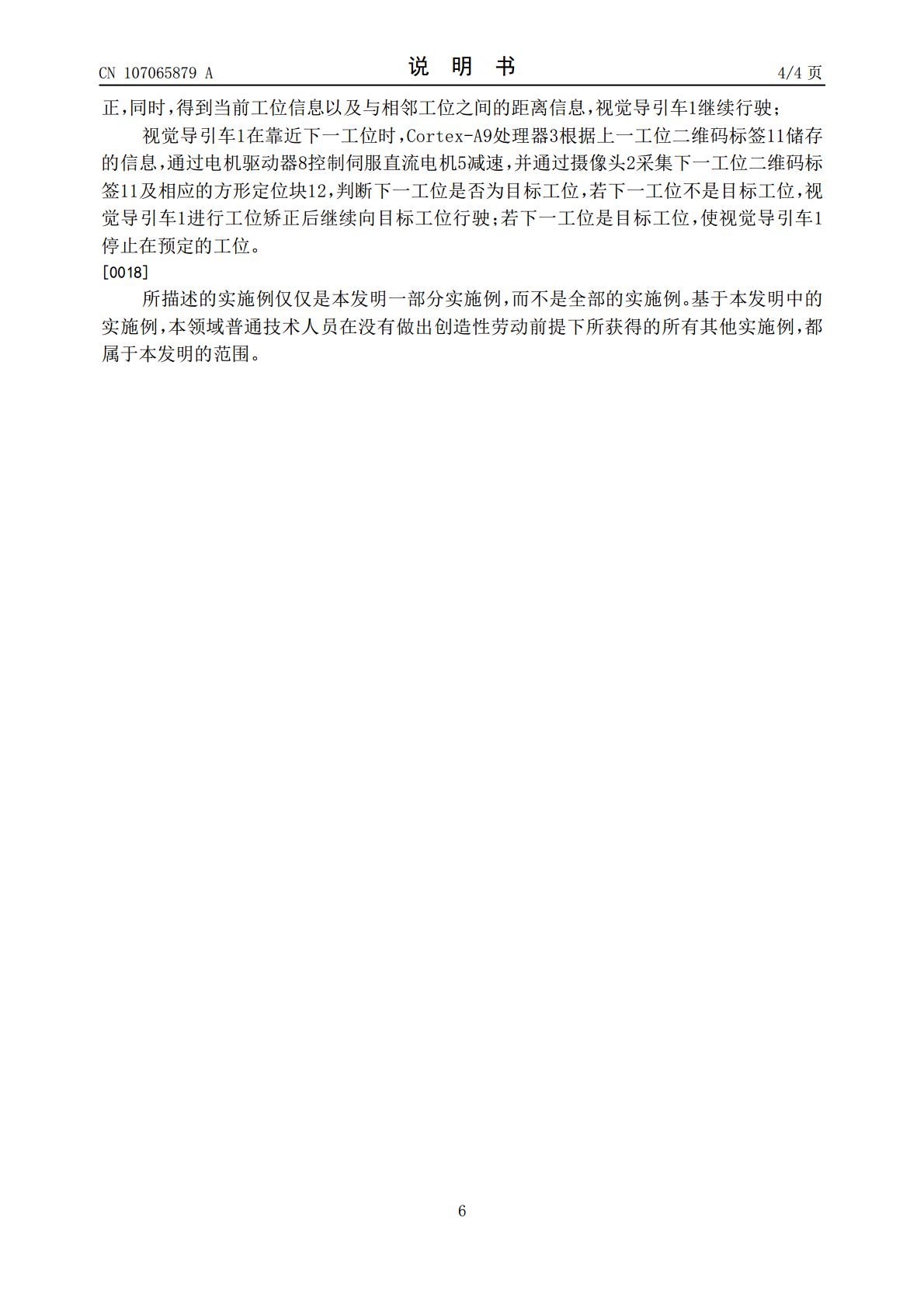
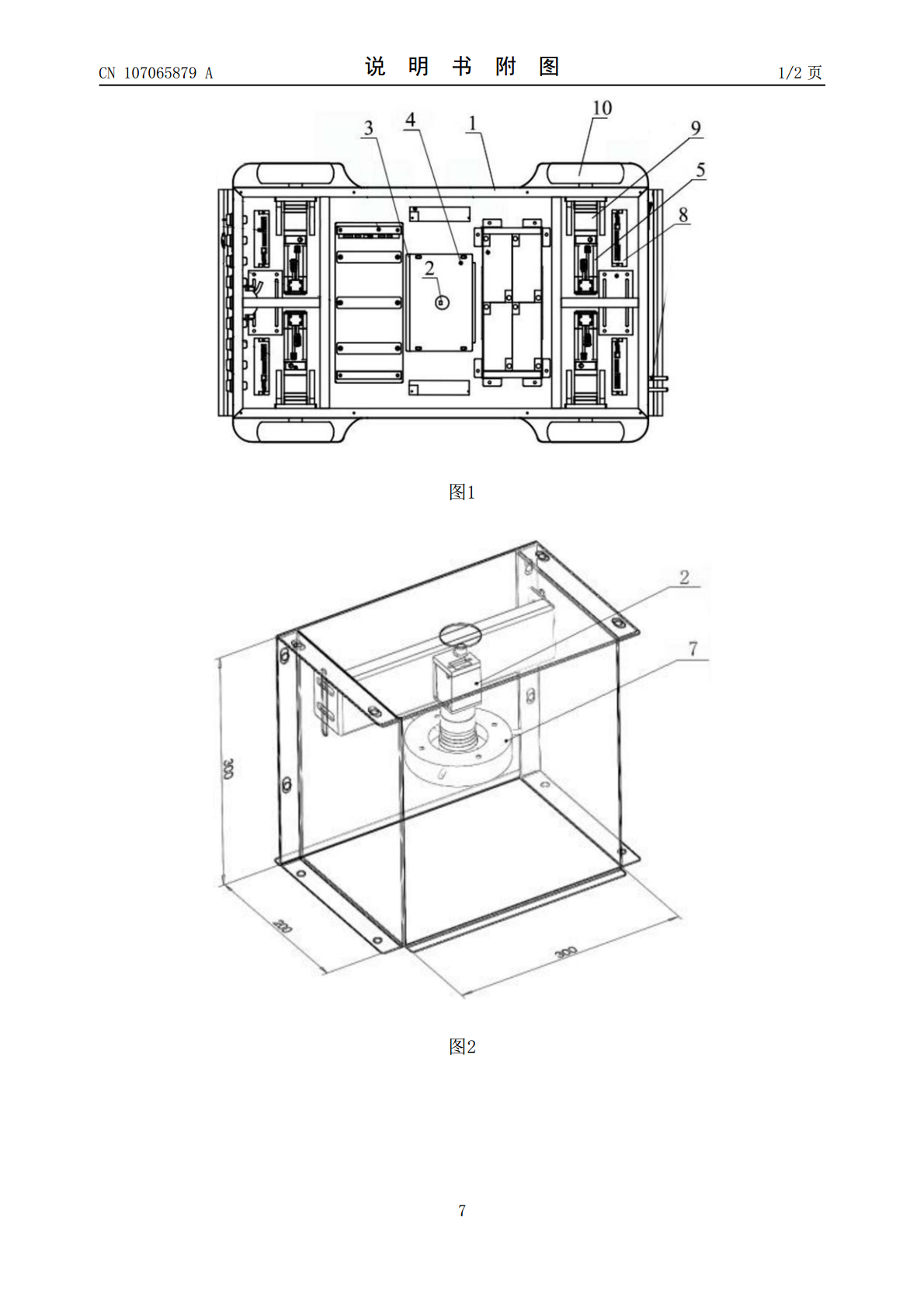
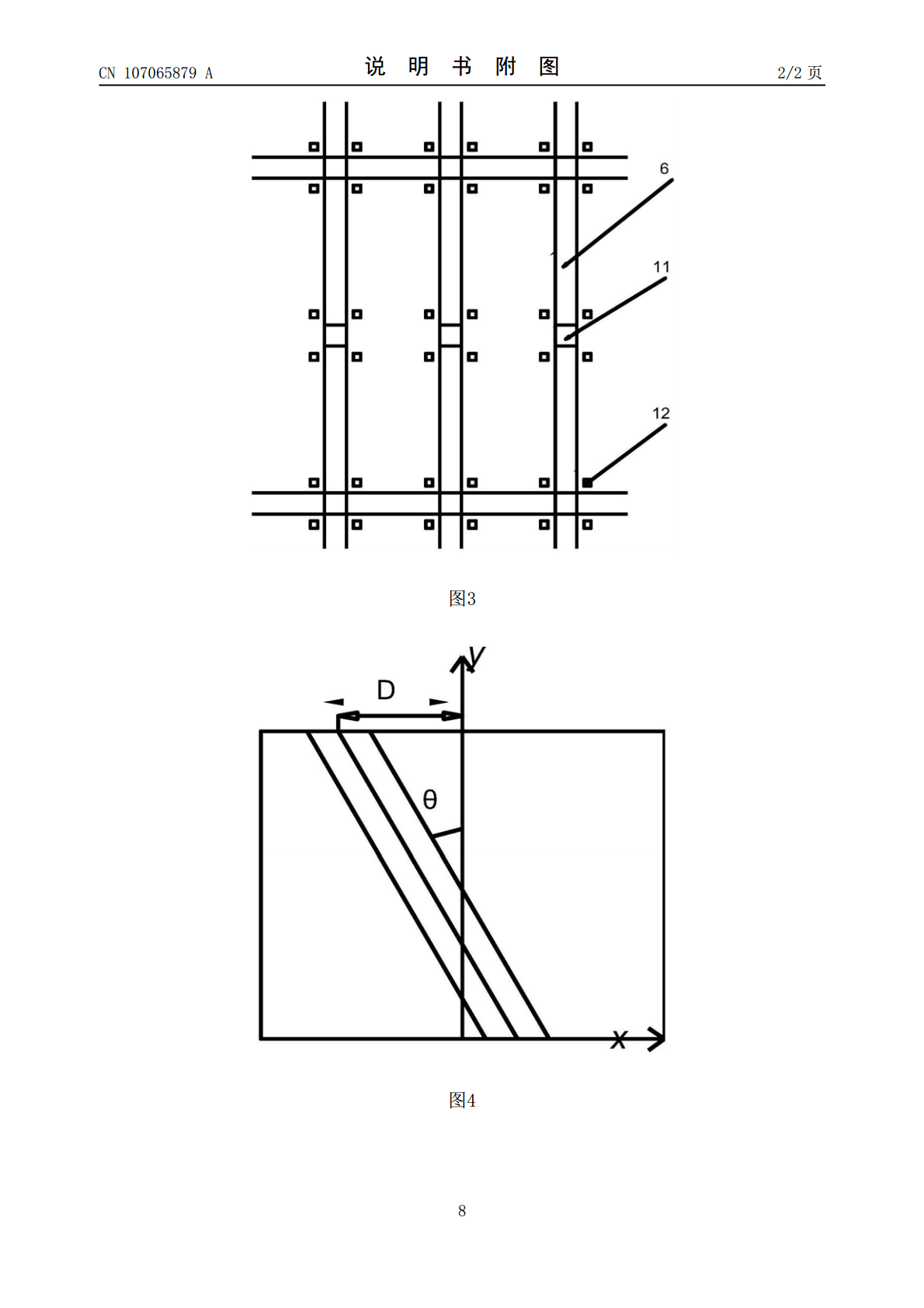
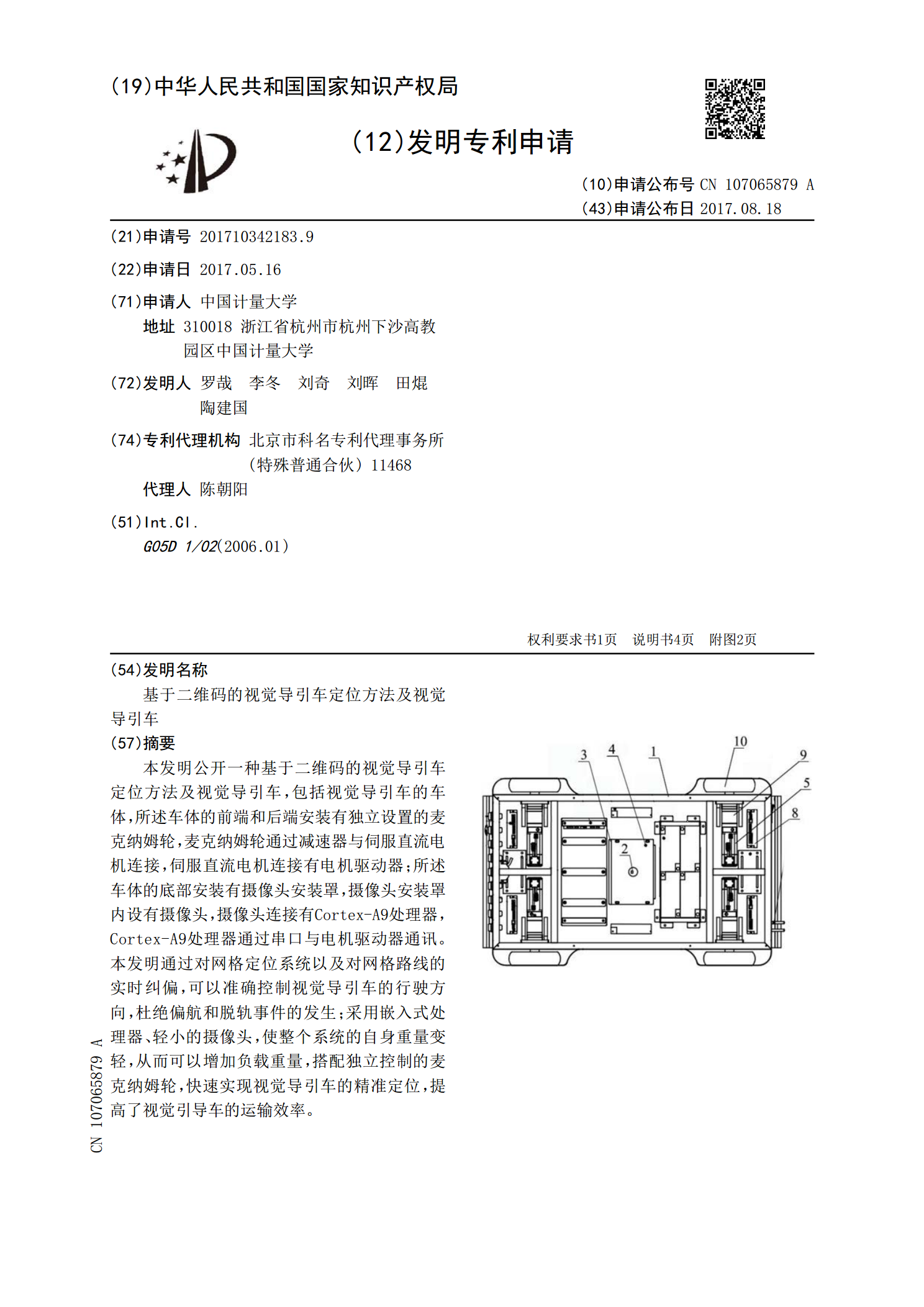
本发明公开一种基于二维码的视觉导引车定位方法及视觉导引车,包括视觉导引车的车体,所述车体的前端和后端安装有独立设置的麦克纳姆轮,麦克纳姆轮通过减速器与伺服直流电机连接,伺服直流电机连接有电机驱动器;所述车体的底部安装有摄像头安装罩,摄像头安装罩内设有摄像头,摄像头连接有Cortex‑A9处理器,Cortex‑A9处理器通过串口与电机驱动器通讯。本发明通过对网格定位系统以及对网格路线的实时纠偏,可以准确控制视觉导引车的行驶方向,杜绝偏航和脱轨事件的发生;采用嵌入式处理器、轻小的摄像头,使整个系统的自身重量变

基于Labview的视觉导引机器车的系统设计.doc
本科生毕业论文(设计)题目基于Labview旳视觉导引机器车旳系统设计学院制造科学与工程学院专业机械设计制造及其自动化学生姓名马伟军学号年级2023级指导教师罗华教务处制表二Ο一Ο年六月十二日基于Labview旳视觉导引机器车旳系统设计专业:机械设计制造及其自动化学生:马伟军指导教师:罗华摘要:伴随自主识别途径旳车辆在机械,物流,交通等行业当中旳广泛应用。中国越来越多旳大学开始举行智能车旳竞赛。规定参赛人员运用提供旳零件以及控制芯片,设计一台可以自主识别道路并进行引导旳智能车,以最终旳速度快慢决胜败。本课
基于Labview的视觉导引机器车的系统设计.doc
本科生毕业论文(设计)题目基于Labview旳视觉导引机器车旳系统设计学院制造科学与工程学院专业机械设计制造及其自动化学生姓名马伟军学号年级2023级指导教师罗华教务处制表二Ο一Ο年六月十二日基于Labview旳视觉导引机器车旳系统设计专业:机械设计制造及其自动化学生:马伟军指导教师:罗华摘要:伴随自主识别途径旳车辆在机械,物流,交通等行业当中旳广泛应用。中国越来越多旳大学开始举行智能车旳竞赛。规定参赛人员运用提供旳零件以及控制芯片,设计一台可以自主识别道路并进行引导旳智能车,以最终旳速度快慢决胜败。本课

自动导引运输车定位方法、定位系统及自动导引运输系统.pdf
本发明公开一种自动导引运输车定位方法、定位系统及自动导引运输系统。本发明根据导航仪的最新采样时间和驱动轮传感器的最新采样时间的大小关系确定导航仪的期望位置。最终获得的导航仪位置的输出频率为驱动轮传感器采样频率与导航仪采样频率之和,由于驱动轮传感器的采样频率远高于导航仪的采样频率,因此,采用本发明提供的定位方法及定位系统能够有效提高AGV导航数据的更新频率,从而提高AGV控制算法频率,进而提高AGV整车控制精度,尤其在高速运动状态下,其优势尤其明显。本发明提供的自动导引运输系统,预测器的输出频率高,能够有效

基于组合导航的自动导引车的定位研究的开题报告.docx
基于组合导航的自动导引车的定位研究的开题报告一、选题背景随着社会的不断发展,人们的生活水平逐步提高,出行方式也变得更加多样化。汽车作为人们日常出行的主要工具之一,在发展过程中也经历了较大的变革,其中一项重要的技术就是自动驾驶技术。在自动驾驶技术中,车辆的定位精度是至关重要的,而基于组合导航的自动导引车可以有效提升车辆的定位精度,从而提高了自动驾驶的效果和安全性。二、选题意义1.提高自动驾驶的稳定性。基于组合导航的自动导引车可以通过组合GPS、IMU、激光雷达等多个传感器,实现更加精准的定位和导航。在不同的