
基于VR技术的远程移动终端三维显控系统和方法.pdf

康佳****文库


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于VR技术的远程移动终端三维显控系统和方法.pdf
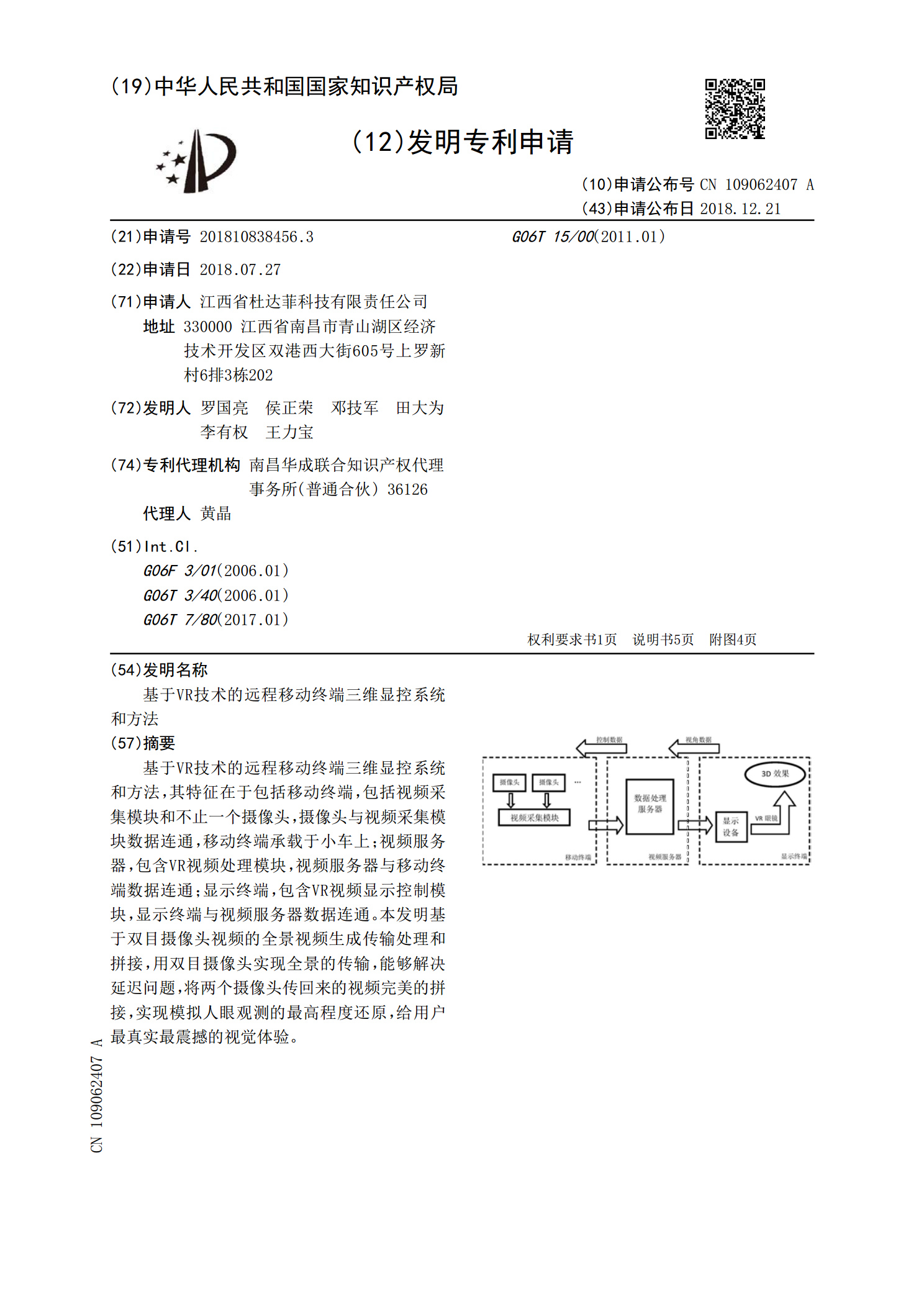
基于VR技术的远程移动终端三维显控系统和方法,其特征在于包括移动终端,包括视频采集模块和不止一个摄像头,摄像头与视频采集模块数据连通,移动终端承载于小车上;视频服务器,包含VR视频处理模块,视频服务器与移动终端数据连通;显示终端,包含VR视频显示控制模块,显示终端与视频服务器数据连通。本发明基于双目摄像头视频的全景视频生成传输处理和拼接,用双目摄像头实现全景的传输,能够解决延迟问题,将两个摄像头传回来的视频完美的拼接,实现模拟人眼观测的最高程度还原,给用户最真实最震撼的视觉体验。

一种基于移动终端的交互式远程跟踪管控方法和系统.pdf
本申请涉及一种基于移动终端的交互式远程跟踪管控方法和系统,涉及海关报关的技术领域。方法包括接收订单信息,并调出与订单信息相对应的单据填写入口;获取工作人员的位置信息和接收涉及报关手续的单据信息;根据涉及报关手续的单据信息后生成电子报关清单;发送或上传报关清单至海关服务器;接收报关清单的审核结果并存储。用于对接收的订单进行记录。本申请具有提高货代公司的管理效率的效果。

基于虚实融合的VR远程火灾勘验系统和方法.pdf
本发明公开了一种基于虚实融合的VR远程火灾勘验系统和方法。所述系统包括:三维模型模块,用于构建火灾现场的三维模型;实时全景预览模块,用于构建实时VR全景火灾现场与地图导航,并基于远程勘察者的实时眼动数据进行实时渲染;物证标注模块,用于对物品进行自动标注,生成多个标注信息,然后将所述标注信息呈现给所述远程勘察者,并接收所述远程勘察者的修订操作,以对所述标注信息进行保留和/或修改;远程交互模块,用于建立多个所述远程勘察者之间和/或所述远程勘察者与现场勘察者之间的实时信息交互。本发明提供的系统和方法的运行效率高

用于远程控制移动终端的方法、装置、移动终端及系统.pdf
本发明涉及一种用于远程控制移动终端的方法、装置、移动终端及系统。所述方法包括:S11、建立与远程移动终端的远程桌面连接;S12、按照时间顺序渲染从远程移动终端接收的连续的屏幕截图,形成动态的远程桌面;S13、采集在所述远程桌面上进行的本地操作信息,所述本地操作信息至少包括操作指令和该操作发生的屏幕坐标;S14、将采集的本地操作信息发送至远程移动终端。本发明的用于远程控制移动终端的方法及装置通过网络传送连续的屏幕截图形成动态的远程桌面,实时呈现流畅的动态效果,使得远程控制更加便捷,过程更加可视化,操作更加直

一种基于VR的技术安全管控系统和方法.pdf
本发明涉及一种基于VR的技术安全管控系统和方法,该系统包括控制器,与控制器连接的获取单元、显示单元、存储单元、输入单元、验收文本导出单元。本发明基于VR建立模型,最终使得虚拟设备符合全部制度,能够有效管控现场执行标准、制度,具备极强的便捷性及通用性,广泛适用于电力系统。本发明能够解决员工对制度不熟悉、新下发技术标准在基层落实、传达不到位,员工对制度理解偏差造成的设备“带病”投入运行的问题,高效省时,间接提高检修质量。