
基于遗传算法优化神经网络结构的机器人姿态控制方法.pdf

是飞****文章

1/8

2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于遗传算法优化神经网络结构的机器人姿态控制方法.pdf
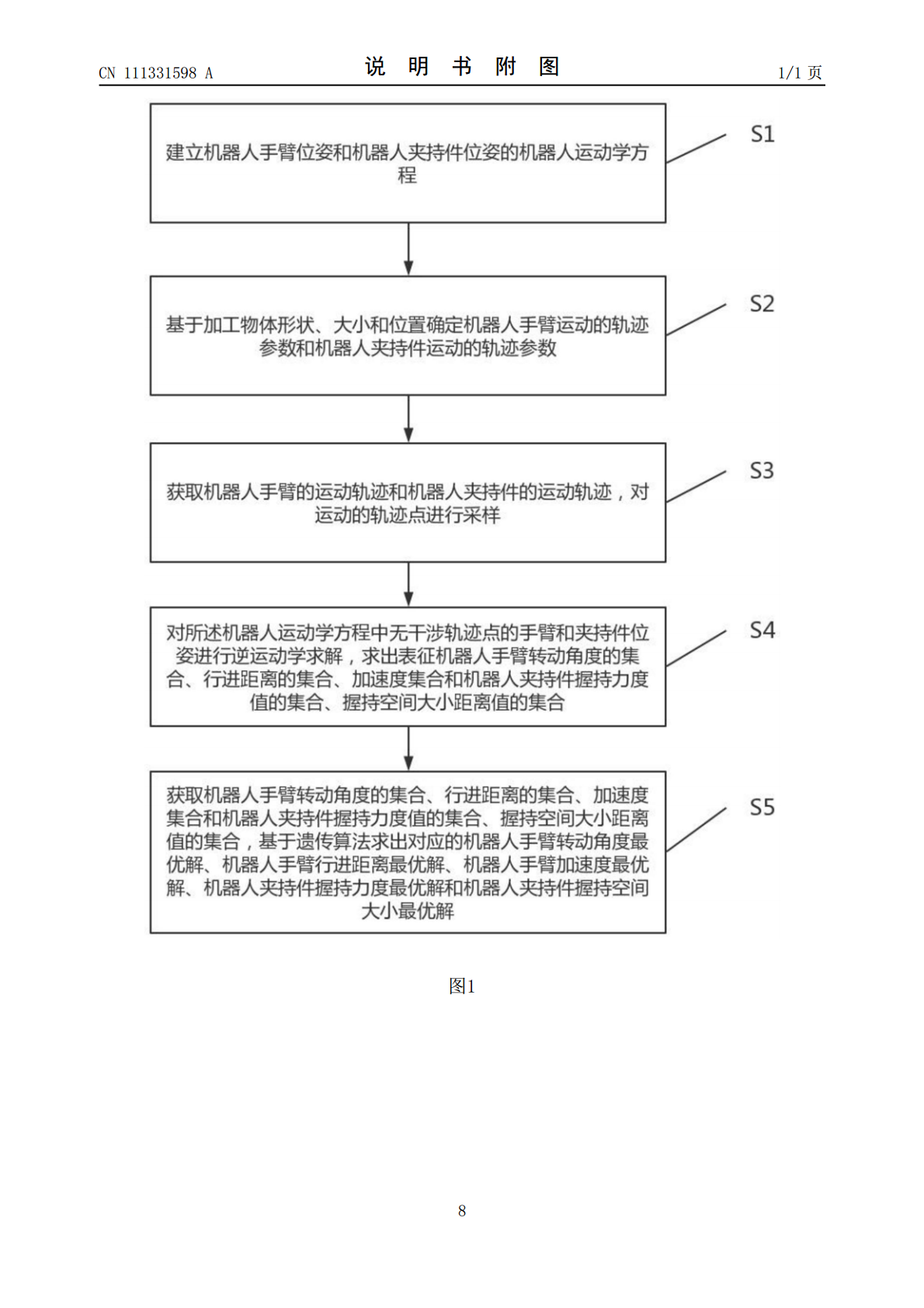
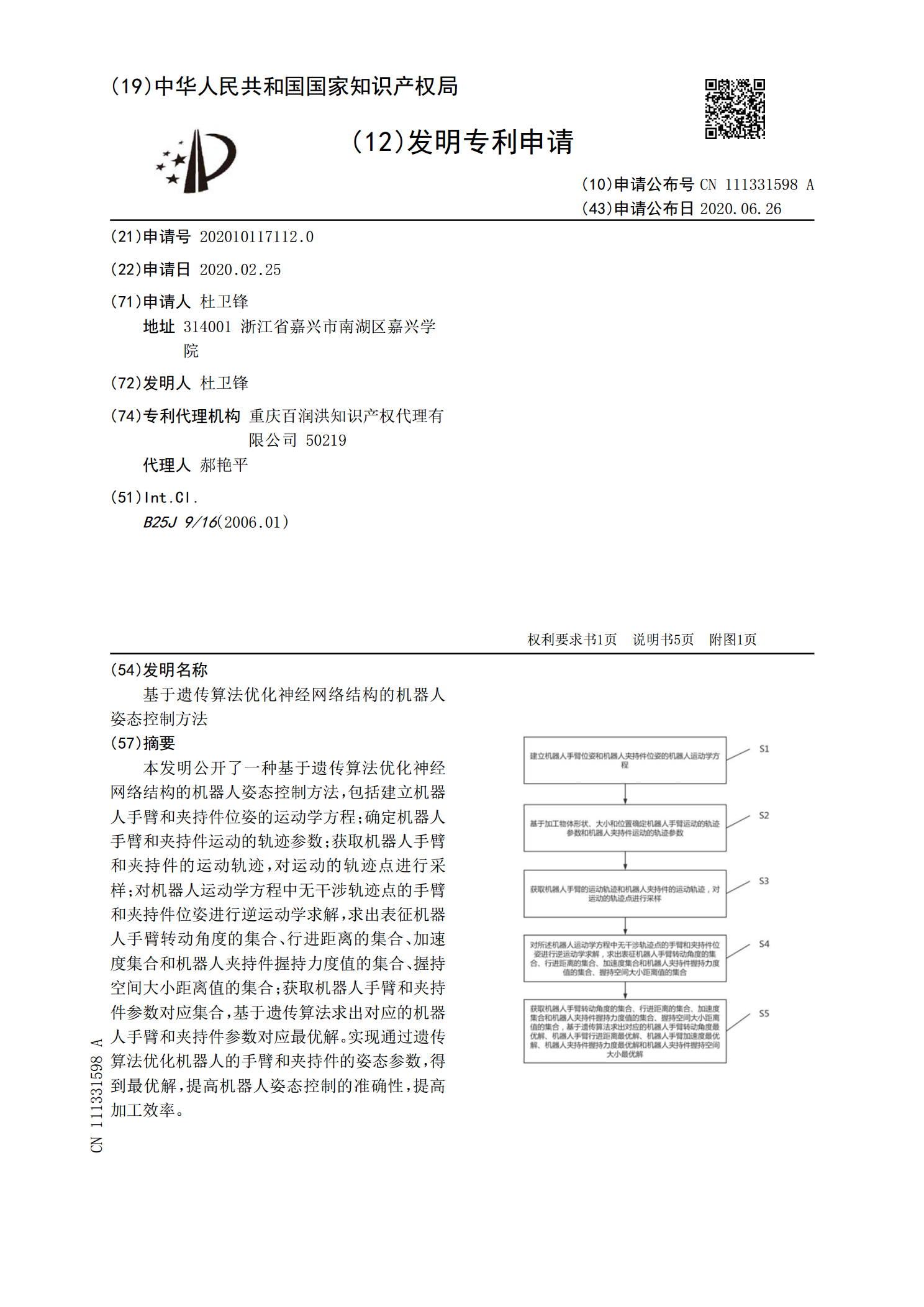
本发明公开了一种基于遗传算法优化神经网络结构的机器人姿态控制方法,包括建立机器人手臂和夹持件位姿的运动学方程;确定机器人手臂和夹持件运动的轨迹参数;获取机器人手臂和夹持件的运动轨迹,对运动的轨迹点进行采样;对机器人运动学方程中无干涉轨迹点的手臂和夹持件位姿进行逆运动学求解,求出表征机器人手臂转动角度的集合、行进距离的集合、加速度集合和机器人夹持件握持力度值的集合、握持空间大小距离值的集合;获取机器人手臂和夹持件参数对应集合,基于遗传算法求出对应的机器人手臂和夹持件参数对应最优解。实现通过遗传算法优化机器人
基于预测机制和遗传算法融合的深度神经网络结构优化方法.pdf
本发明公开了一种基于预测机制和遗传算法融合的深度神经网络结构优化方法,用于解决现有网络结构搜索方法搜索效率低的技术问题。技术方案是首先对深度网络结构进行编码表示,形成网络结构编码,随后随机生成网络结构编码,作为遗传算法的初代;接着,对初代中的个体进行选择、交叉、变异与预测过程,并仅对预期性能较高的个体对应的网络进行实际训练;最后,对所有个体表现进行评估,并进入下一轮的选择操作。算法结束后,选择适应度最佳的个体即为特定任务下的网络最优结构。通过在网络实际训练前对网络性能进行预测,可以降低搜索算法在低价值网络

基于改进遗传算法的神经网络结构优化研究的中期报告.docx
基于改进遗传算法的神经网络结构优化研究的中期报告一、研究背景神经网络是一种模拟人类神经网络的计算机系统,具有自我学习和自适应的能力,在许多领域都得到了广泛应用。神经网络的优化是神经网络研究的热点之一,而神经网络的结构优化是神经网络优化的关键问题之一。当前,针对神经网络结构优化的研究主要有进化算法、遗传算法、粒子群优化算法等。遗传算法是一种重要的优化方法,具有全局优化能力和容易并行化等优点,因此被广泛应用于神经网络结构优化。二、研究内容本研究旨在基于改进遗传算法,探究其在神经网络结构优化方面的应用,并进行相

基于遗传算法的神经网络优化方法.ppt
3.2基于遗传算法的神经网络优化方法概述概述3.2.2遗传算法简介3.2.2遗传算法简介3.2.2遗传算法简介遗传算法的流程图3.2.3遗传算法工具箱3.2.3遗传算法工具箱3.2.4用遗传算法优化神经网络权值的学习过程3.2.4用遗传算法优化神经网络权值的学习过程小结
一种基于改进遗传算法的指挥控制体系网络结构优化方法.pdf
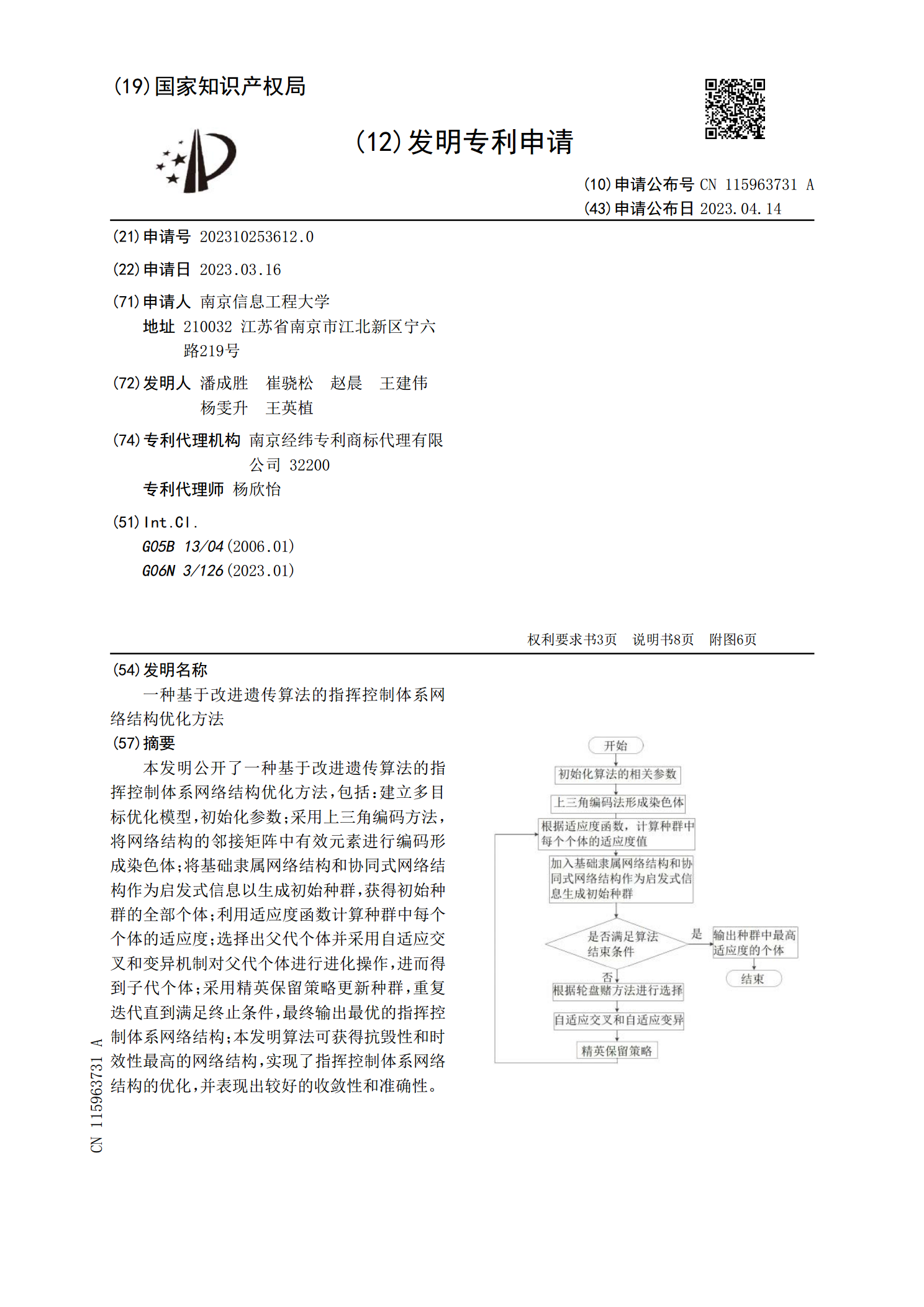
本发明公开了一种基于改进遗传算法的指挥控制体系网络结构优化方法,包括:建立多目标优化模型,初始化参数;采用上三角编码方法,将网络结构的邻接矩阵中有效元素进行编码形成染色体;将基础隶属网络结构和协同式网络结构作为启发式信息以生成初始种群,获得初始种群的全部个体;利用适应度函数计算种群中每个个体的适应度;选择出父代个体并采用自适应交叉和变异机制对父代个体进行进化操作,进而得到子代个体;采用精英保留策略更新种群,重复迭代直到满足终止条件,最终输出最优的指挥控制体系网络结构;本发明算法可获得抗毁性和时效性最高的网