
支持移动网络接入的支付终端.pdf

书生****写意

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
支持移动网络接入的支付终端.pdf
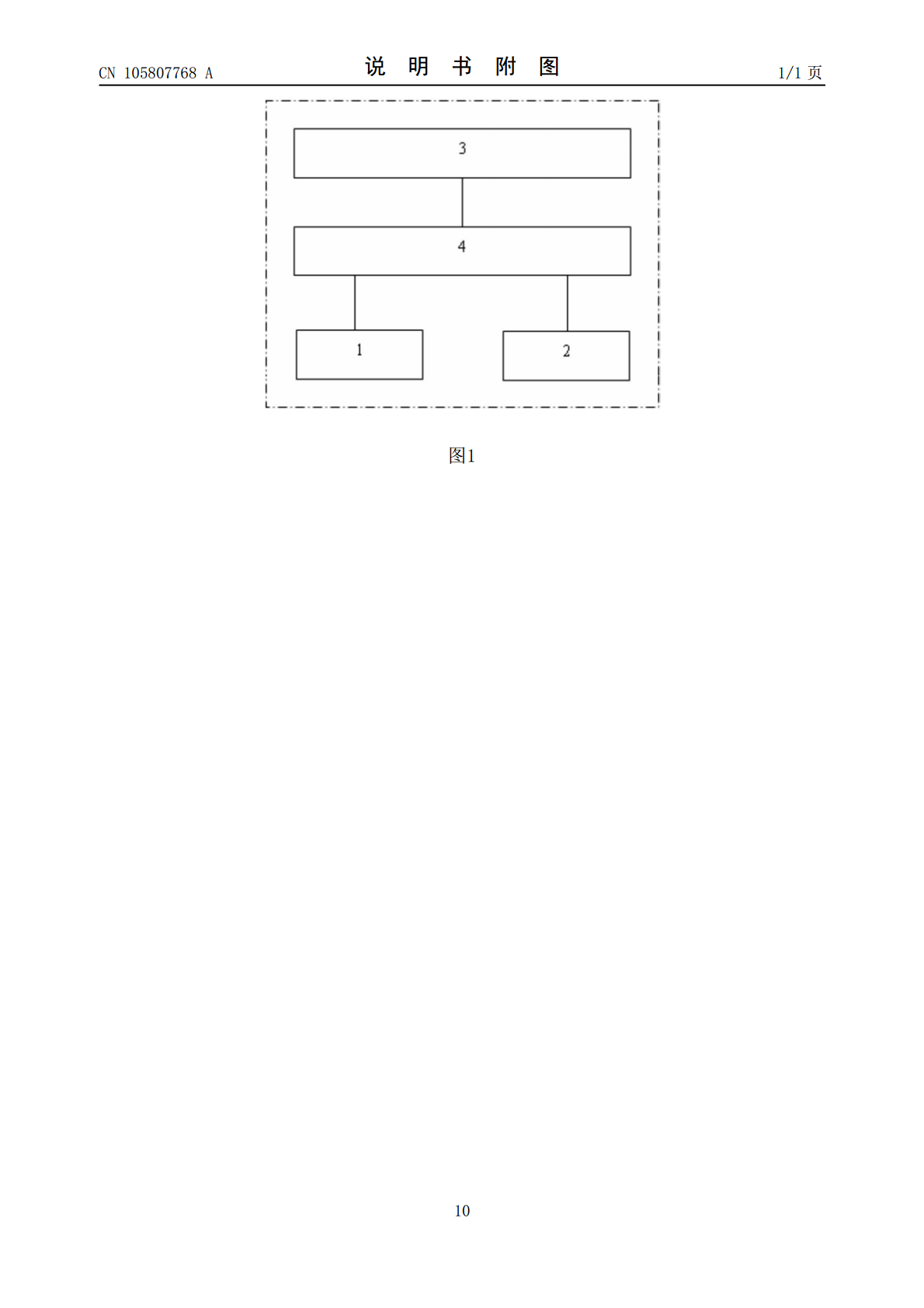
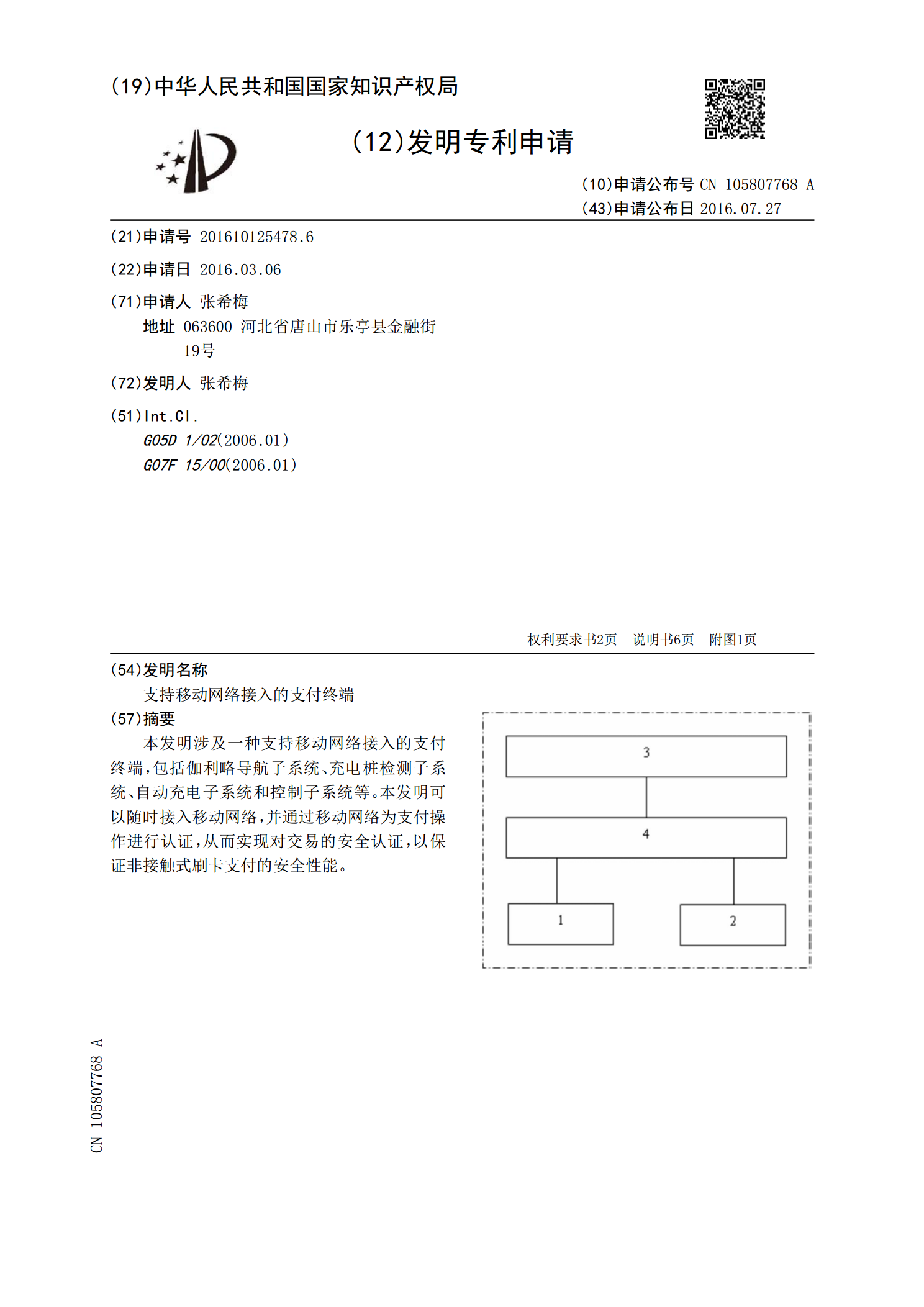
本发明涉及一种支持移动网络接入的支付终端,包括伽利略导航子系统、充电桩检测子系统、自动充电子系统和控制子系统等。本发明可以随时接入移动网络,并通过移动网络为支付操作进行认证,从而实现对交易的安全认证,以保证非接触式刷卡支付的安全性能。
支持移动网络接入的支付终端及支付方法.pdf
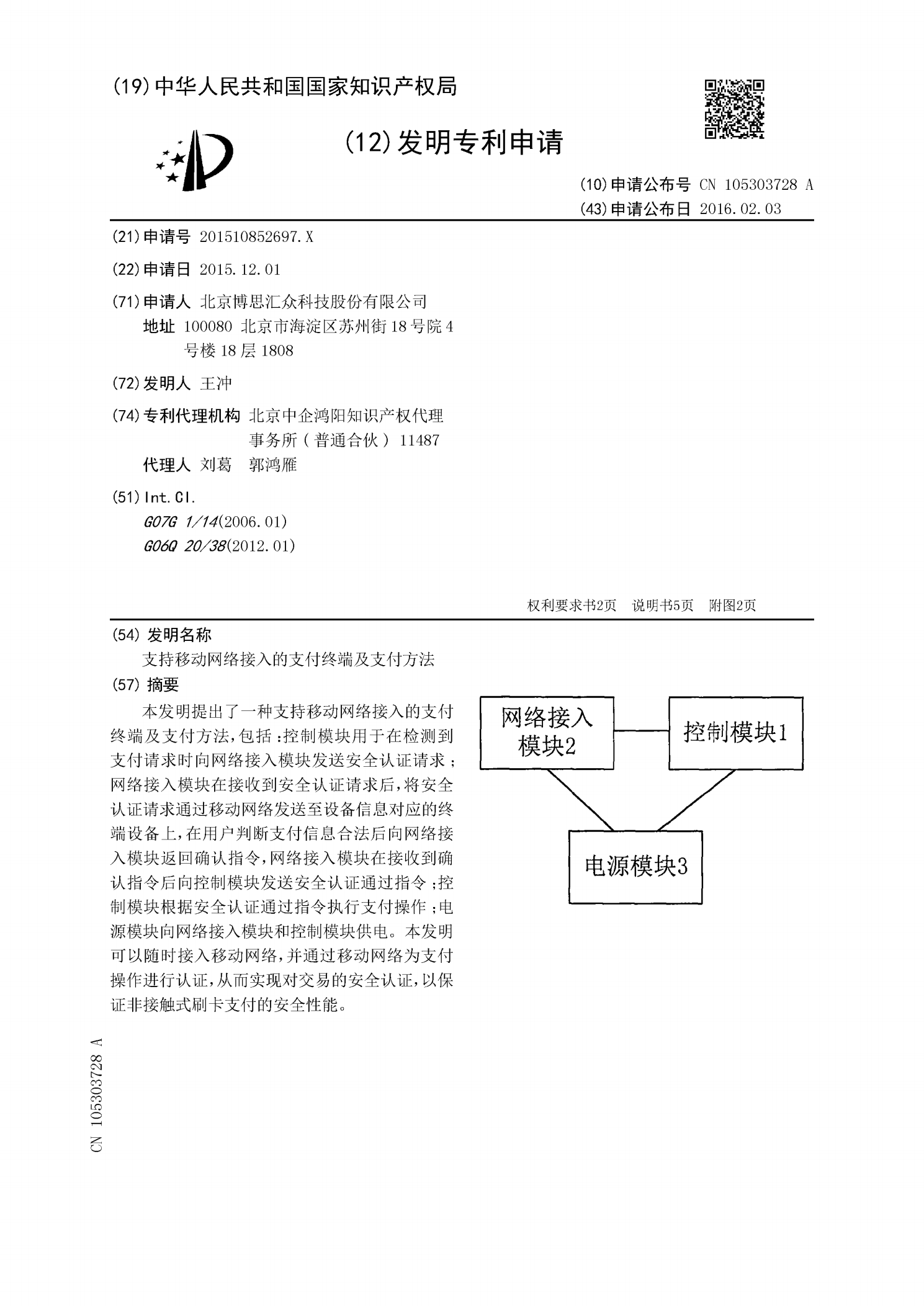
本发明提出了一种支持移动网络接入的支付终端及支付方法,包括:控制模块用于在检测到支付请求时向网络接入模块发送安全认证请求;网络接入模块在接收到安全认证请求后,将安全认证请求通过移动网络发送至设备信息对应的终端设备上,在用户判断支付信息合法后向网络接入模块返回确认指令,网络接入模块在接收到确认指令后向控制模块发送安全认证通过指令;控制模块根据安全认证通过指令执行支付操作;电源模块向网络接入模块和控制模块供电。本发明可以随时接入移动网络,并通过移动网络为支付操作进行认证,从而实现对交易的安全认证,以保证非接触
移动终端接入方法及移动终端.pdf
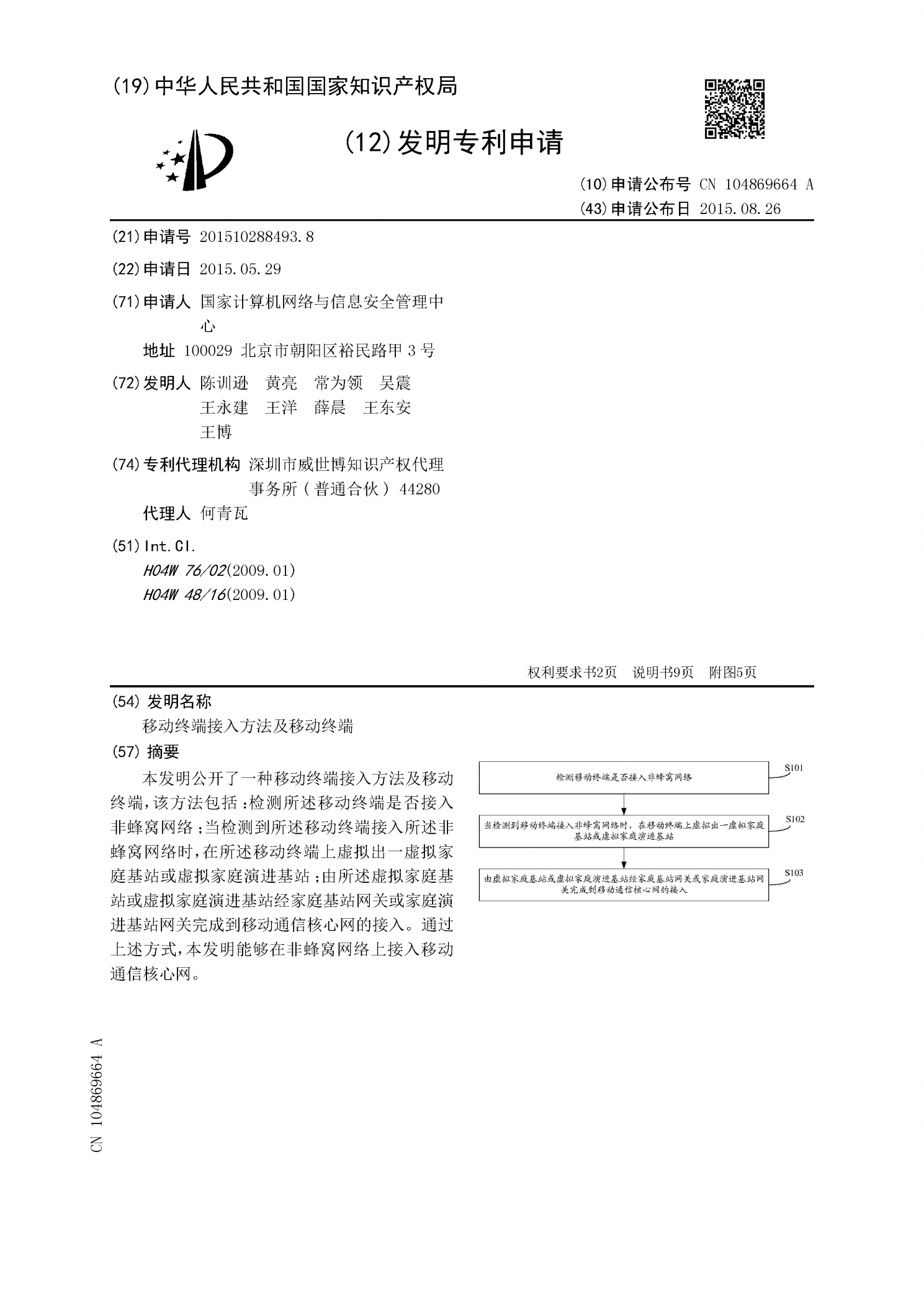
本发明公开了一种移动终端接入方法及移动终端,该方法包括:检测所述移动终端是否接入非蜂窝网络;当检测到所述移动终端接入所述非蜂窝网络时,在所述移动终端上虚拟出一虚拟家庭基站或虚拟家庭演进基站;由所述虚拟家庭基站或虚拟家庭演进基站经家庭基站网关或家庭演进基站网关完成到移动通信核心网的接入。通过上述方式,本发明能够在非蜂窝网络上接入移动通信核心网。
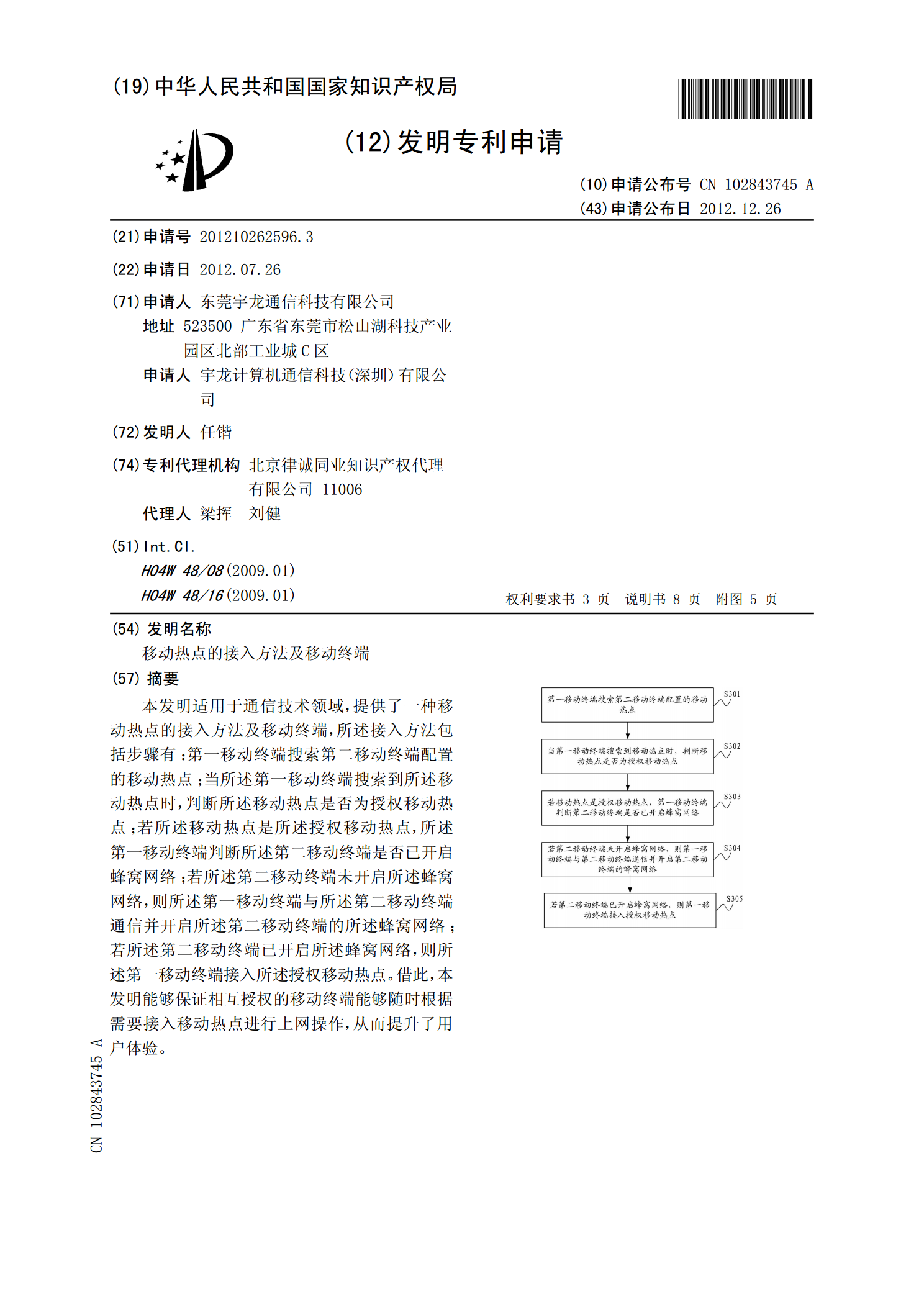
移动热点的接入方法及移动终端.pdf
本发明适用于通信技术领域,提供了一种移动热点的接入方法及移动终端,所述接入方法包括步骤有:第一移动终端搜索第二移动终端配置的移动热点;当所述第一移动终端搜索到所述移动热点时,判断所述移动热点是否为授权移动热点;若所述移动热点是所述授权移动热点,所述第一移动终端判断所述第二移动终端是否已开启蜂窝网络;若所述第二移动终端未开启所述蜂窝网络,则所述第一移动终端与所述第二移动终端通信并开启所述第二移动终端的所述蜂窝网络;若所述第二移动终端已开启所述蜂窝网络,则所述第一移动终端接入所述授权移动热点。借此,本发明能够
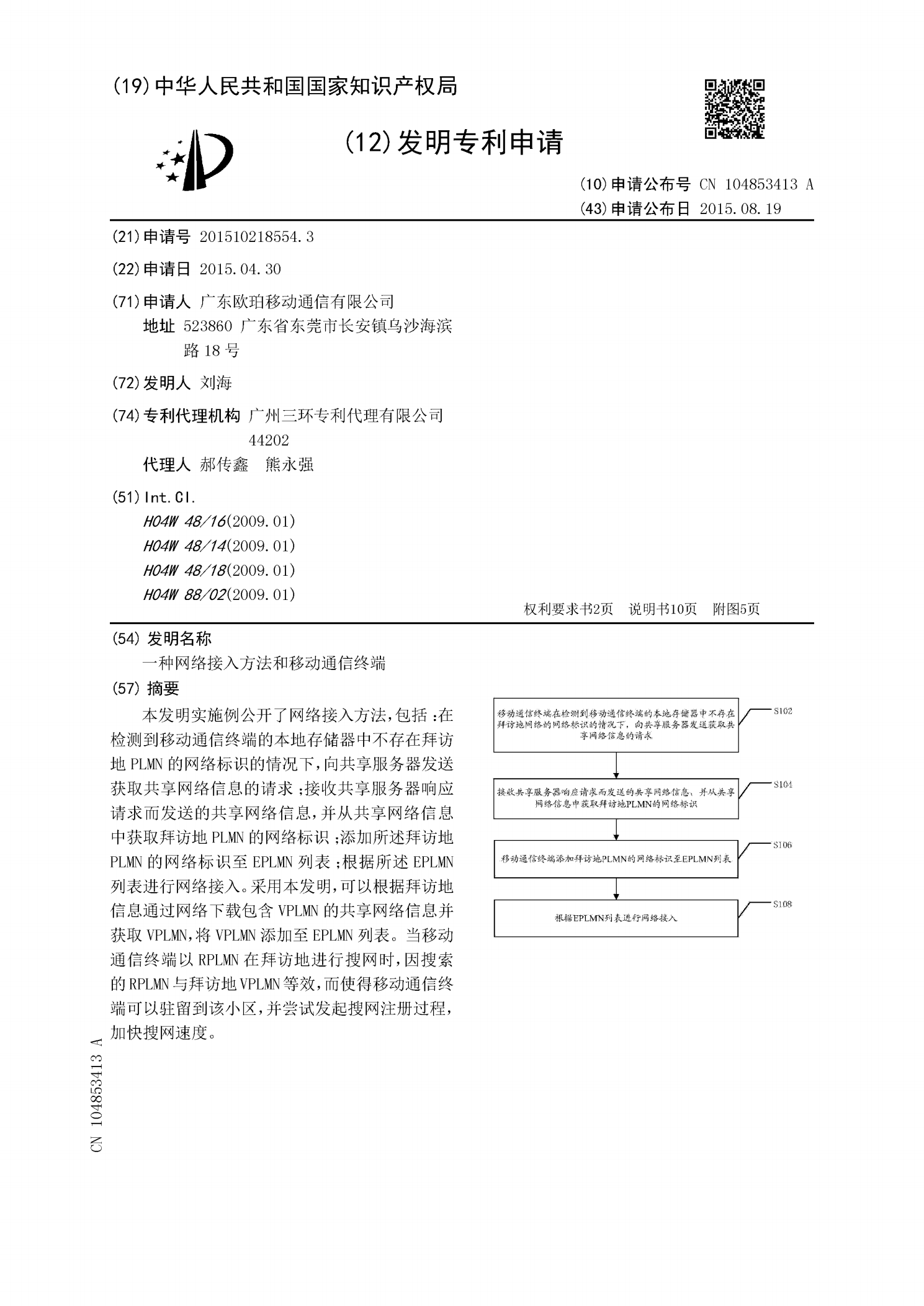
一种网络接入方法和移动通信终端.pdf
本发明实施例公开了网络接入方法,包括:在检测到移动通信终端的本地存储器中不存在拜访地PLMN的网络标识的情况下,向共享服务器发送获取共享网络信息的请求;接收共享服务器响应请求而发送的共享网络信息,并从共享网络信息中获取拜访地PLMN的网络标识;添加所述拜访地PLMN的网络标识至EPLMN列表;根据所述EPLMN列表进行网络接入。采用本发明,可以根据拜访地信息通过网络下载包含VPLMN的共享网络信息并获取VPLMN,将VPLMN添加至EPLMN列表。当移动通信终端以RPLMN在拜访地进行搜网时,因搜索的RP