
基于多尺度傅里叶梅林变换的图像匹配方法.pdf

代瑶****zy


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于多尺度傅里叶梅林变换的图像匹配方法.pdf
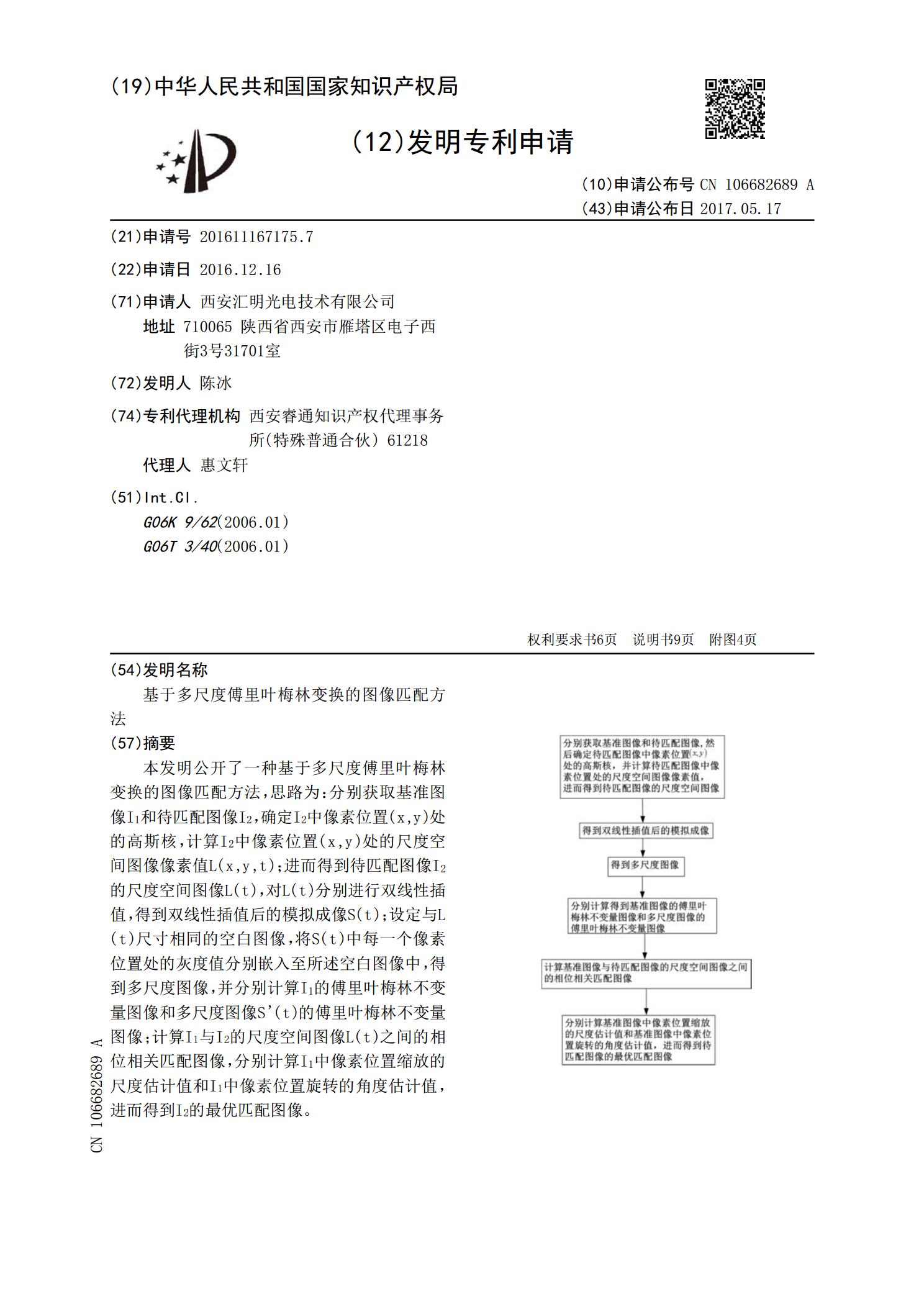
本发明公开了一种基于多尺度傅里叶梅林变换的图像匹配方法,思路为:分别获取基准图像I

基于傅里叶梅林变换的图像几何匹配方法.pdf
本发明公开了一种基于傅里叶梅林变换的图像几何匹配方法,解决了待匹配图像和参考图像间旋转角度较大时匹配精度差,时间长的问题。匹配过程包括:用傅里叶梅林变换求待匹配图像和参考图像间的旋转角;对旋转角矫正,得到初步匹配图像;提取上述两幅图像显著图的特征点;对特征点关联;求解仿射变换模型;用该模型变换初步匹配图像,用双线性插值法对变换后图像插值,得到最终匹配图像。本发明能有效处理待匹配图像与参考图像间旋转角度差较小的情况,且可处理两图像间旋转角较大的情况,匹配时间远小于SIFT算法的匹配时间。本发明精度高、匹配效

基于图像特征的傅里叶梅林变换在图像配准中的应用.docx
基于图像特征的傅里叶梅林变换在图像配准中的应用傅里叶梅林变换(FFT)在图像处理领域中具有广泛的应用,其中最重要的是在图像配准领域。在本文中,我们将介绍傅里叶变换的基本原理以及在图像配准中的应用。傅里叶梅林变换(FFT)是一种常见的信号处理技术。它通过将信号分解为不同的频率来将信号从时域转换到频域。在图像处理中,我们可以将图像看作是由许多不同频率的信号叠加而成的,而傅里叶变换可以将这些不同的频率信号分离开来,提供有关图像的频域信息。在图像配准中,我们通常使用自适应块匹配(ABM)算法来寻找两幅图像之间的对

一种基于傅里叶-梅林变换的目标跟踪方法.pdf
本发明提出一种基于傅里叶‑梅林变换的目标跟踪方法,属于计算机视觉与数字图像处理领域;解决目标跟踪技术中所跟踪的目标发生旋转和尺度变化的问题;具体步骤为:读入待跟踪视频帧序列,在第一帧标记选择要跟踪的目标,对搜索区域进行特征提取,搜索检测区域由笛卡尔坐标系转化到对数极坐标系,目标在笛卡尔坐标系下旋转和尺度变换,进而转换为对数极坐标系下平移变换,利用傅里叶‑梅林变换获得跟踪目标旋转角度和尺度变换大小;对所跟踪的目标模版进行插值更新;本发明可以实现高鲁棒性和长时间实时跟踪,当目标发生旋转或者尺度变化时,能够及时

一种基于傅里叶-梅林变换的货物定位方法.pdf
本发明公开了一种基于傅里叶‑梅林变换的货物定位方法,包括:步骤一,建立绝对坐标系,设置标定点,识别标定点定位货架的位置信息;步骤二,安装摄像头在避光处;步骤三,建立图像特征库,实时提取拍摄的货物的特定帧图像作为相应货物位置的特征图像,通过货架的位置信息,获得仿射变换矩阵,再仿射变换得到新的特征图像,记为货物特征图像库;步骤四,获取当前取物结构位置拍摄的货物图像,基于傅里叶‑梅林变换的图像配准,计算货物与取物机构的位姿关系;步骤五,对特征图形库进行更新,并跳转到步骤四进行后续的图像配准工作;本方法实现多种货