
检测跌倒的容器的系统和方法.pdf

慧颖****23


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共43页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

检测跌倒的容器的系统和方法.pdf
本申请涉及检测跌倒的容器的系统和方法。方法、系统、计算机程序产品、设备和电路配置为利用不同的传感器检测适合于自动化评估设备的引入区上游或者靠近引入区的跌倒的容器,所述不同的传感器包括至少一个下部传感器和至少一个上部传感器,所述至少一个上部传感器被定位成以对应于直立容器的顶部部分的高度投射光信号,从而允许检测不同的方向和位置跌倒的容器的增加的可靠性。可以使用与所述第一下部传感器纵向间隔开的可选择的第二下部传感器,并且所述下部传感器可以横穿容器的行进路径传送不交叉的光信号。
跌倒检测系统和方法.pdf
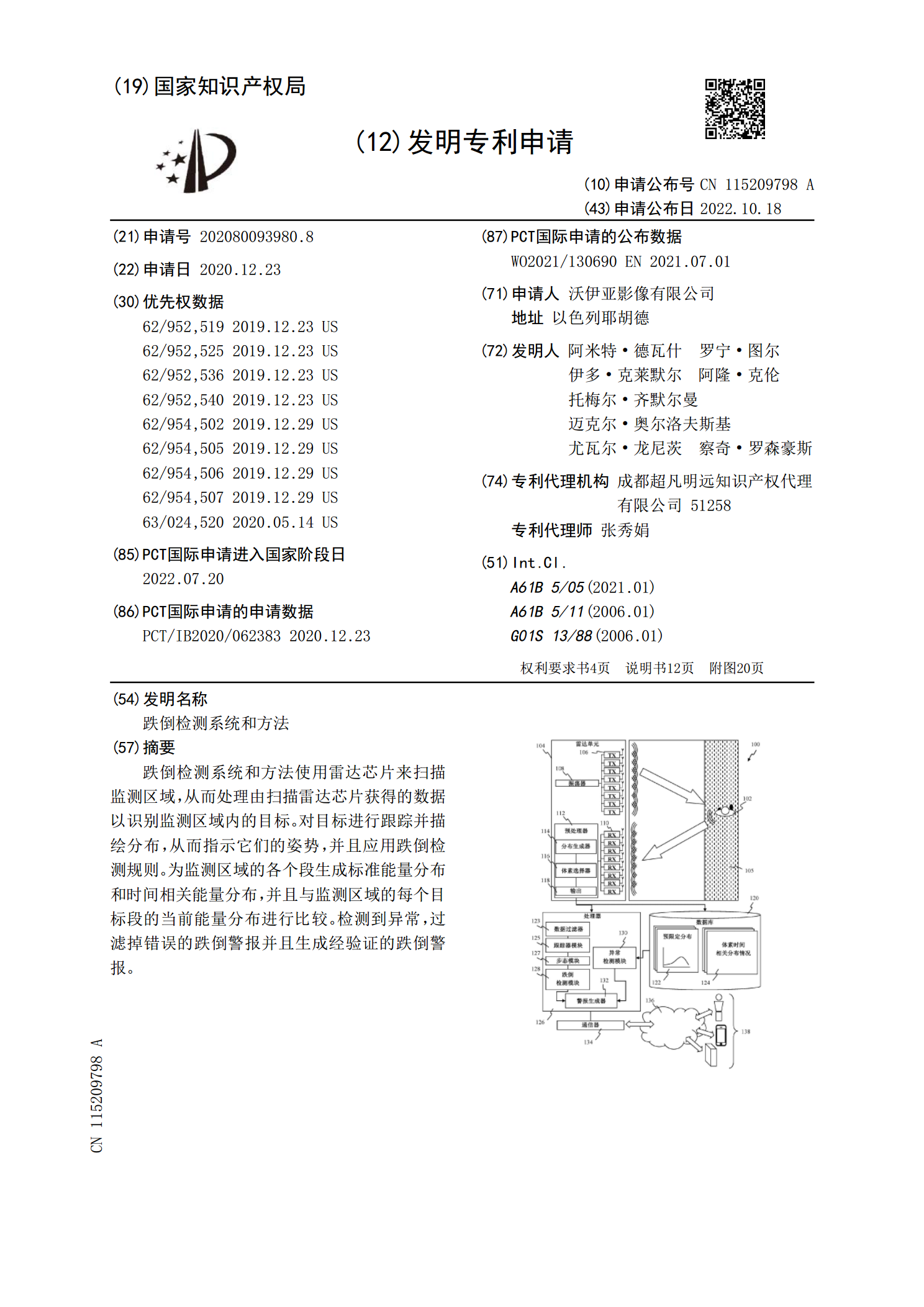
跌倒检测系统和方法使用雷达芯片来扫描监测区域,从而处理由扫描雷达芯片获得的数据以识别监测区域内的目标。对目标进行跟踪并描绘分布,从而指示它们的姿势,并且应用跌倒检测规则。为监测区域的各个段生成标准能量分布和时间相关能量分布,并且与监测区域的每个目标段的当前能量分布进行比较。检测到异常,过滤掉错误的跌倒警报并且生成经验证的跌倒警报。
用于行人跌倒检测的方法、系统和存储介质.pdf
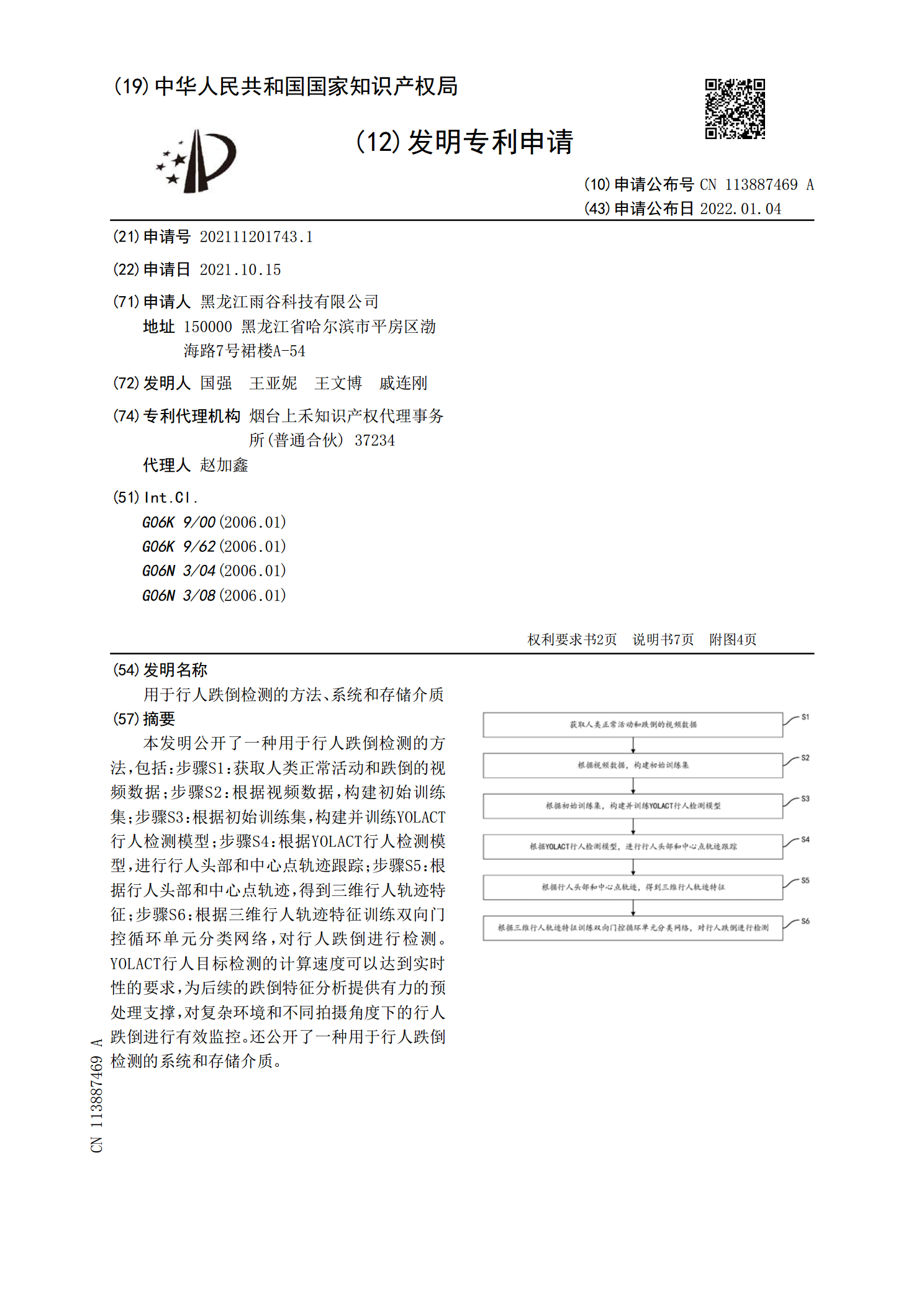
本发明公开了一种用于行人跌倒检测的方法,包括:步骤S1:获取人类正常活动和跌倒的视频数据;步骤S2:根据视频数据,构建初始训练集;步骤S3:根据初始训练集,构建并训练YOLACT行人检测模型;步骤S4:根据YOLACT行人检测模型,进行行人头部和中心点轨迹跟踪;步骤S5:根据行人头部和中心点轨迹,得到三维行人轨迹特征;步骤S6:根据三维行人轨迹特征训练双向门控循环单元分类网络,对行人跌倒进行检测。YOLACT行人目标检测的计算速度可以达到实时性的要求,为后续的跌倒特征分析提供有力的预处理支撑,对复杂环境和

跌倒监测和预防系统及方法.pdf
(19)中华人民共和国国家知识产权局(12)发明专利说明书(10)申请公布号CN102048521A(43)申请公布日2011.05.11(21)申请号CN200910221324.7(22)申请日2009.11.03(71)申请人香港理工大学地址中国香港九龙红磡(72)发明人郑永平赵文伟周永进张忠伟利达兴何俊峰(74)专利代理机构深圳市顺天达专利商标代理有限公司代理人郭伟刚(51)Int.CIA61B5/00权利要求说明书说明书幅图(54)发明名称跌倒监测和预防系统及方法(57)摘要一种跌倒监测和预防系

发明授权-2019113716756-隐私保护跌倒检测方法和系统.pdf
(19)中华人民共和国国家知识产权局(12)发明专利(10)授权公告号CN111383421B(45)授权公告日2021.12.17(21)申请号201911371675.6(74)专利代理机构深圳中细软知识产权代理有(22)申请日2019.12.27限公司44528代理人仉玉新(65)同一申请的已公布的文献号申请公布号CN111383421A(51)Int.Cl.G08B21/04(2006.01)(43)申请公布日2020.07.07G06K9/00(2006.01)(30)优先权数据(56)对比文件