
一种基于视频卫星影像的DSM生成方法.pdf

Th****s3

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于视频卫星影像的DSM生成方法.pdf
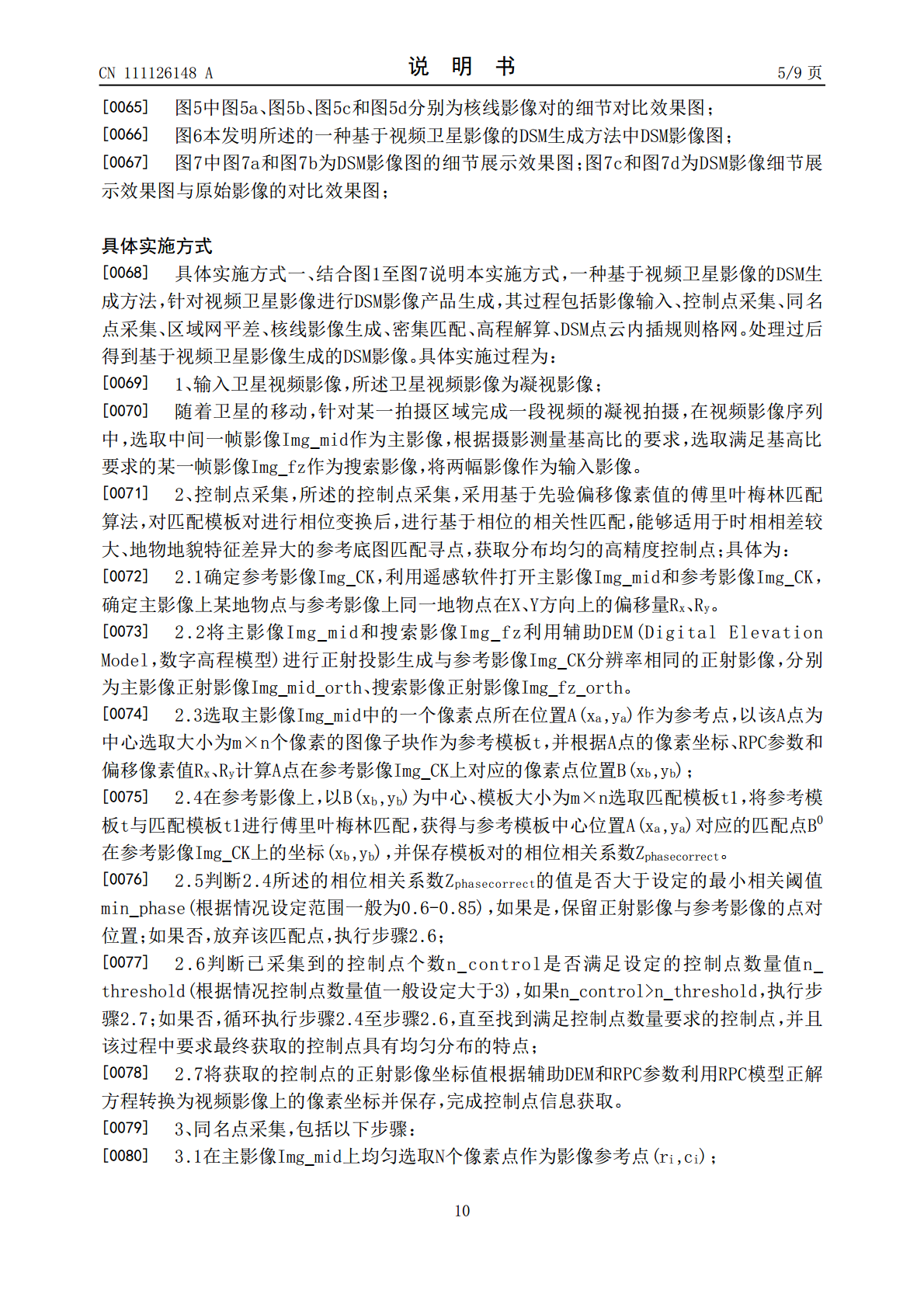
一种基于视频卫星影像的DSM生成方法,涉及卫星遥感影像处理技术领域,解决现有DSM生成方法存在实地采集数据区域困难、数据类型过于单一以及存在需要执行多次拍摄任务等问题,控制点提取通过傅里叶梅林算法适用于较大时相差异的参考底图提取控制信息;核线生成环节使用了基于投影高程面的方法,能够获取高精度的核线影像,将密集匹配的搜索从二维影像面精准的缩小到一维搜索行上,提高工作效率;密集匹配环境采用SGM的匹配方法,通过能量函数进行动态规划,获取连续性、整体性最好的视差关系图;本发明的视频卫星影像通过控制点采集、同名点

卫星影像制作DSM的方法研究.pptx
汇报人:CONTENTSDSM概述DSM定义DSM应用领域DSM制作方法卫星影像制作DSM的原理卫星影像获取影像预处理特征提取与匹配生成DSM卫星影像制作DSM的关键技术多尺度分割与特征融合影像匹配算法优化高程信息提取与优化DSM精度提升方法卫星影像制作DSM的实践案例案例选择与数据准备制作流程与实验设置实验结果与分析案例总结与展望卫星影像制作DSM的优缺点及未来发展方向优点分析缺点分析未来发展方向技术挑战与机遇汇报人:

改进半全局匹配的高分卫星影像DSM提取方法.docx
改进半全局匹配的高分卫星影像DSM提取方法标题:改进半全局匹配的高分辨率卫星影像DSM提取方法摘要:高分辨率卫星影像的数字表面模型(DSM)是许多地表分析和应用的重要输入数据。半全局匹配(SGBM)算法被广泛用于高分辨率卫星影像DSM提取中,但由于其在复杂地貌和纹理变化区域的性能不佳,需要进一步改进。本论文提出了一种改进的SGBM方法,结合了多尺度特征和多视图信息,以提高高分辨率卫星影像DSM提取的精度和鲁棒性。1.引言近年来,高分辨率卫星影像的获取和分析得到了广泛的研究和应用。其中,DSM数据在城市规划
卫星影像生成的高程.pdf
卫星影像生成的高程卫星影像生成的高程是通过卫星遥感技术获取地球表面的高程信息。这种技术利用卫星传感器获取地球表面的图像,并通过图像处理和数学模型来推导出地表的高程数据。卫星影像生成的高程数据在地理信息系统(GIS)、地形分析、城市规划、环境监测等领域具有广泛的应用。卫星影像生成的高程数据是通过多种技术和方法来获取的。其中最常用的方法是利用卫星搭载的雷达传感器进行测量。雷达传感器可以发射电磁波并接收其反射回来的信号,通过测量信号的时间延迟和频率变化来计算地表的高程。这种方法可以在任何天气条件下进行测量,并且

基于卫星影像和RPC原理的DEM生成研究.docx
基于卫星影像和RPC原理的DEM生成研究基于卫星影像和RPC原理的DEM生成研究摘要:数字高程模型(DigitalElevationModel,DEM)作为一种用来描述地表地形的数字化模型,在多个领域中得到了广泛的应用。本文以卫星影像为数据源,利用RPC(RationalPolynomialCoefficients)原理生成DEM,通过对卫星影像进行预处理、RPC标定、DEM生成等步骤的研究和实践,得出了一种高精度、高分辨率的DEM生成方法,具有较好的应用前景。关键词:卫星影像,RPC原理,DEM生成,预