
喷胶轨迹信息确定方法及装置.pdf

猫巷****盟主

1/10
2/10
3/10

4/10

5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
喷胶轨迹信息确定方法及装置.pdf
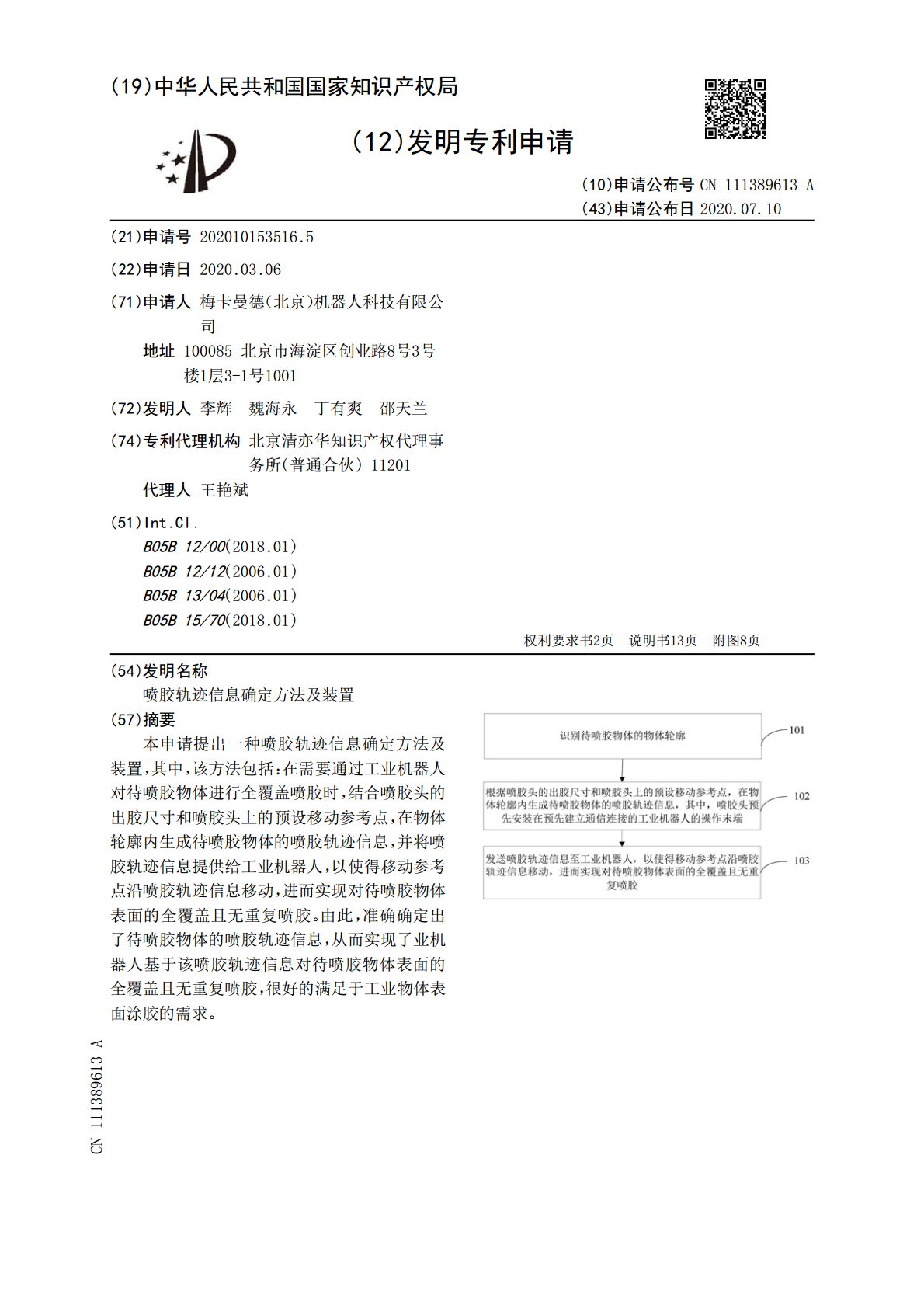
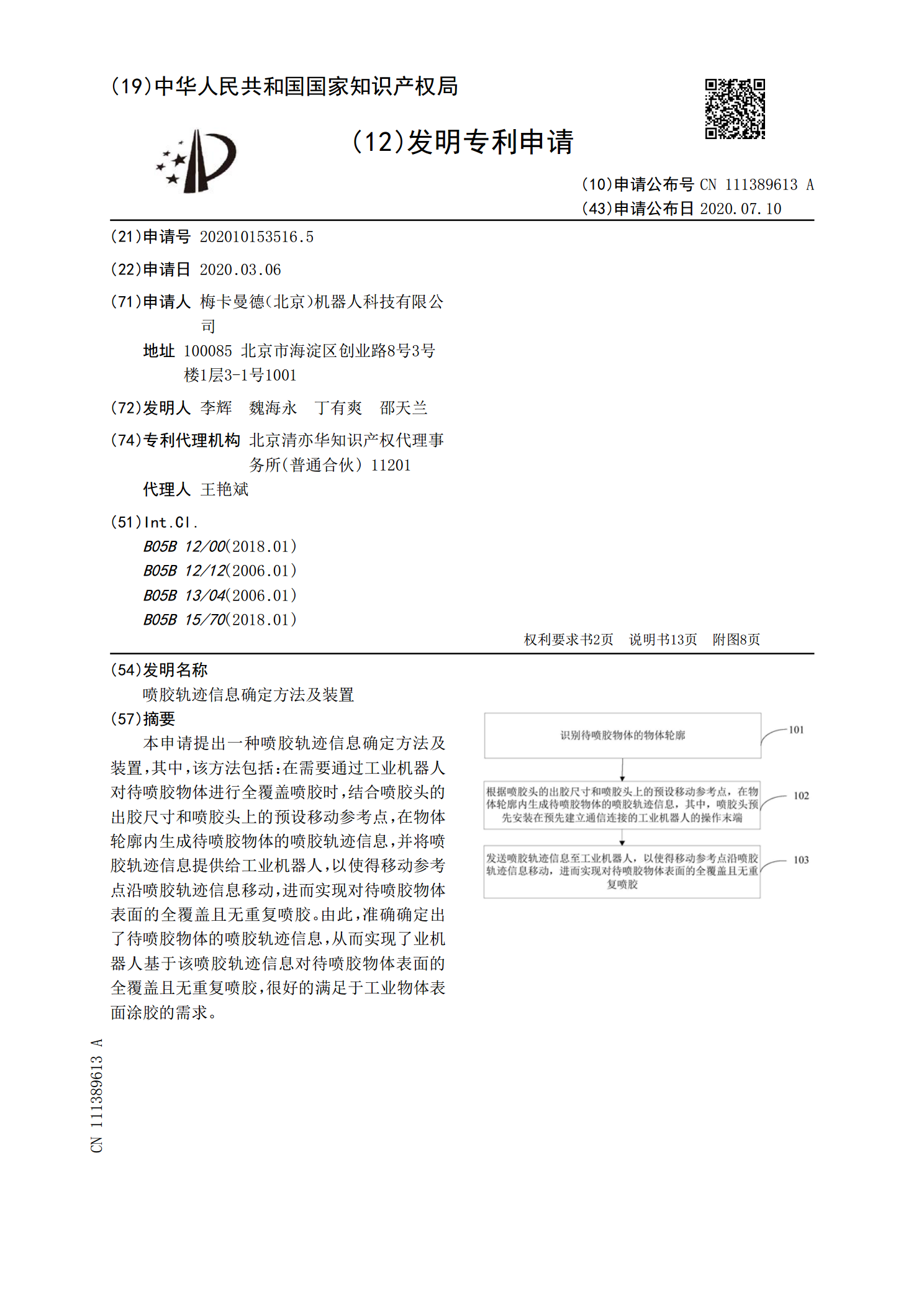
本申请提出一种喷胶轨迹信息确定方法及装置,其中,该方法包括:在需要通过工业机器人对待喷胶物体进行全覆盖喷胶时,结合喷胶头的出胶尺寸和喷胶头上的预设移动参考点,在物体轮廓内生成待喷胶物体的喷胶轨迹信息,并将喷胶轨迹信息提供给工业机器人,以使得移动参考点沿喷胶轨迹信息移动,进而实现对待喷胶物体表面的全覆盖且无重复喷胶。由此,准确确定出了待喷胶物体的喷胶轨迹信息,从而实现了业机器人基于该喷胶轨迹信息对待喷胶物体表面的全覆盖且无重复喷胶,很好的满足于工业物体表面涂胶的需求。

喷胶装置及喷胶方法.pdf
本发明公开了一种喷胶装置,包括凸轮,凸轮连接滑杆开关的左端,滑杆开关的右侧连接压缩弹簧;在凸轮和压缩弹簧的共同作用下,控制滑杆开关的往复直线运动;滑杆开关活动设置于胶缸内;胶缸的上部设置有上通道,胶缸的下部设置有下通道;滑杆开关活动设置于上通道与下通道之间;滑杆开关在往复直线运动的过程中,当其连接孔正对上通道和下通道时,连接孔将上通道与下通道接通,实现喷胶;当滑杆开关运动一段行程,其连接孔错开上通道和下通道,断开上通道与下通道,则停止喷胶。本发明用简单的直线机构代替复杂的旋转机构,由于直线运动的行程非常小
喷胶装置及喷胶方法.pdf
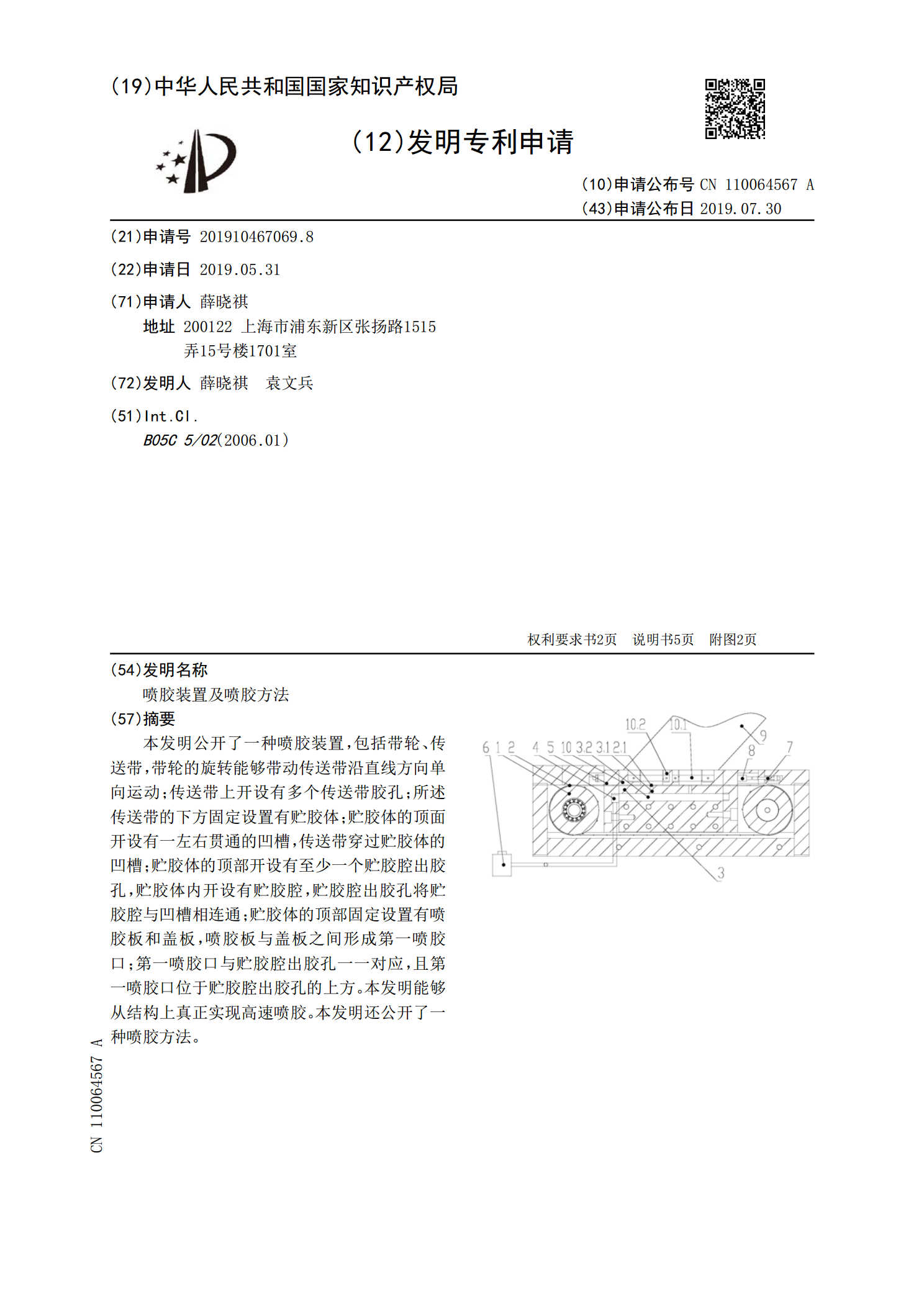
本发明公开了一种喷胶装置,包括带轮、传送带,带轮的旋转能够带动传送带沿直线方向单向运动;传送带上开设有多个传送带胶孔;所述传送带的下方固定设置有贮胶体;贮胶体的顶面开设有一左右贯通的凹槽,传送带穿过贮胶体的凹槽;贮胶体的顶部开设有至少一个贮胶腔出胶孔,贮胶体内开设有贮胶腔,贮胶腔出胶孔将贮胶腔与凹槽相连通;贮胶体的顶部固定设置有喷胶板和盖板,喷胶板与盖板之间形成第一喷胶口;第一喷胶口与贮胶腔出胶孔一一对应,且第一喷胶口位于贮胶腔出胶孔的上方。本发明能够从结构上真正实现高速喷胶。本发明还公开了一种喷胶方法。
喷胶头、自动喷胶装置及其喷胶方法.pdf
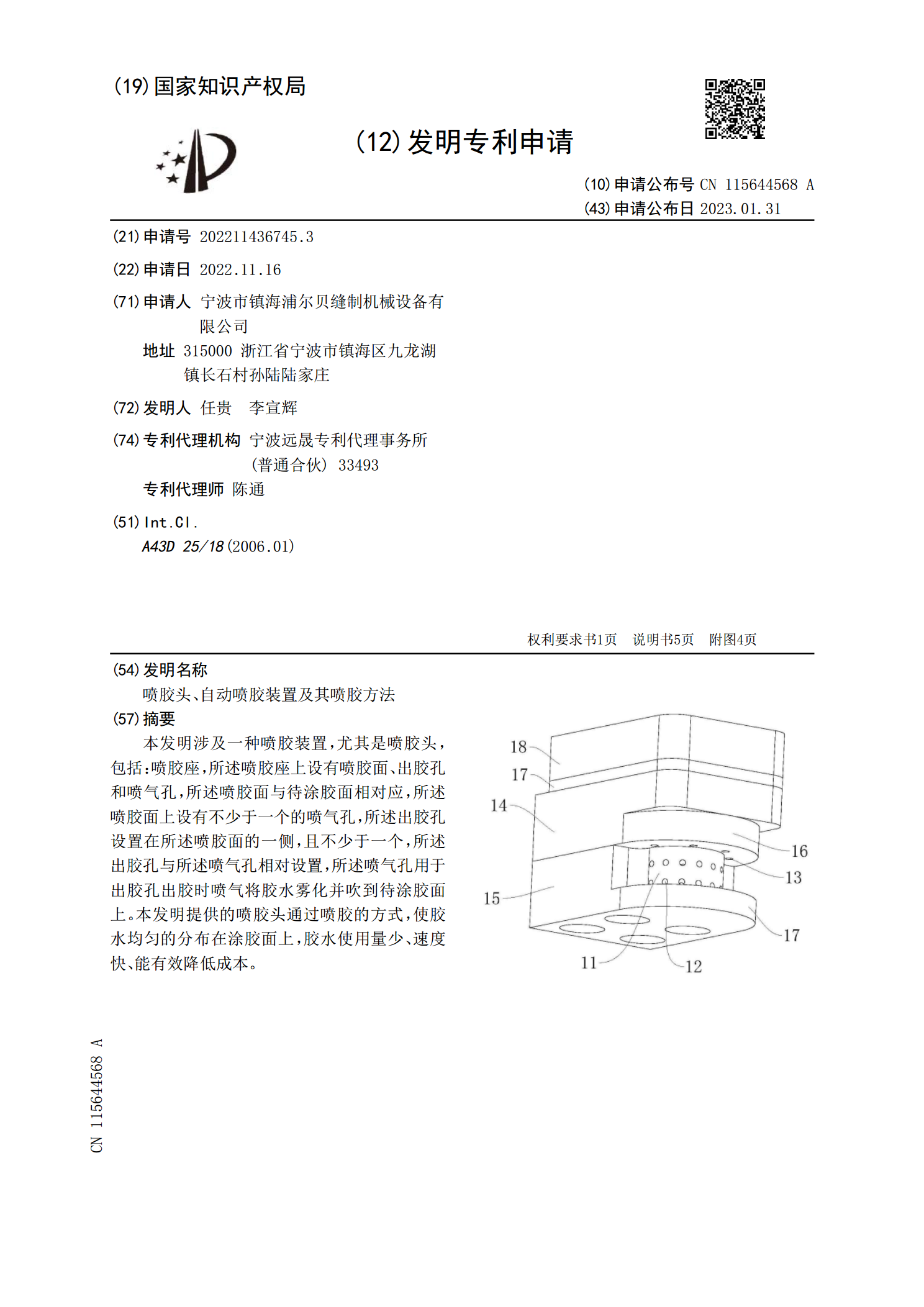
本发明涉及一种喷胶装置,尤其是喷胶头,包括:喷胶座,所述喷胶座上设有喷胶面、出胶孔和喷气孔,所述喷胶面与待涂胶面相对应,所述喷胶面上设有不少于一个的喷气孔,所述出胶孔设置在所述喷胶面的一侧,且不少于一个,所述出胶孔与所述喷气孔相对设置,所述喷气孔用于出胶孔出胶时喷气将胶水雾化并吹到待涂胶面上。本发明提供的喷胶头通过喷胶的方式,使胶水均匀的分布在涂胶面上,胶水使用量少、速度快、能有效降低成本。
喷胶机构及喷胶装置.pdf
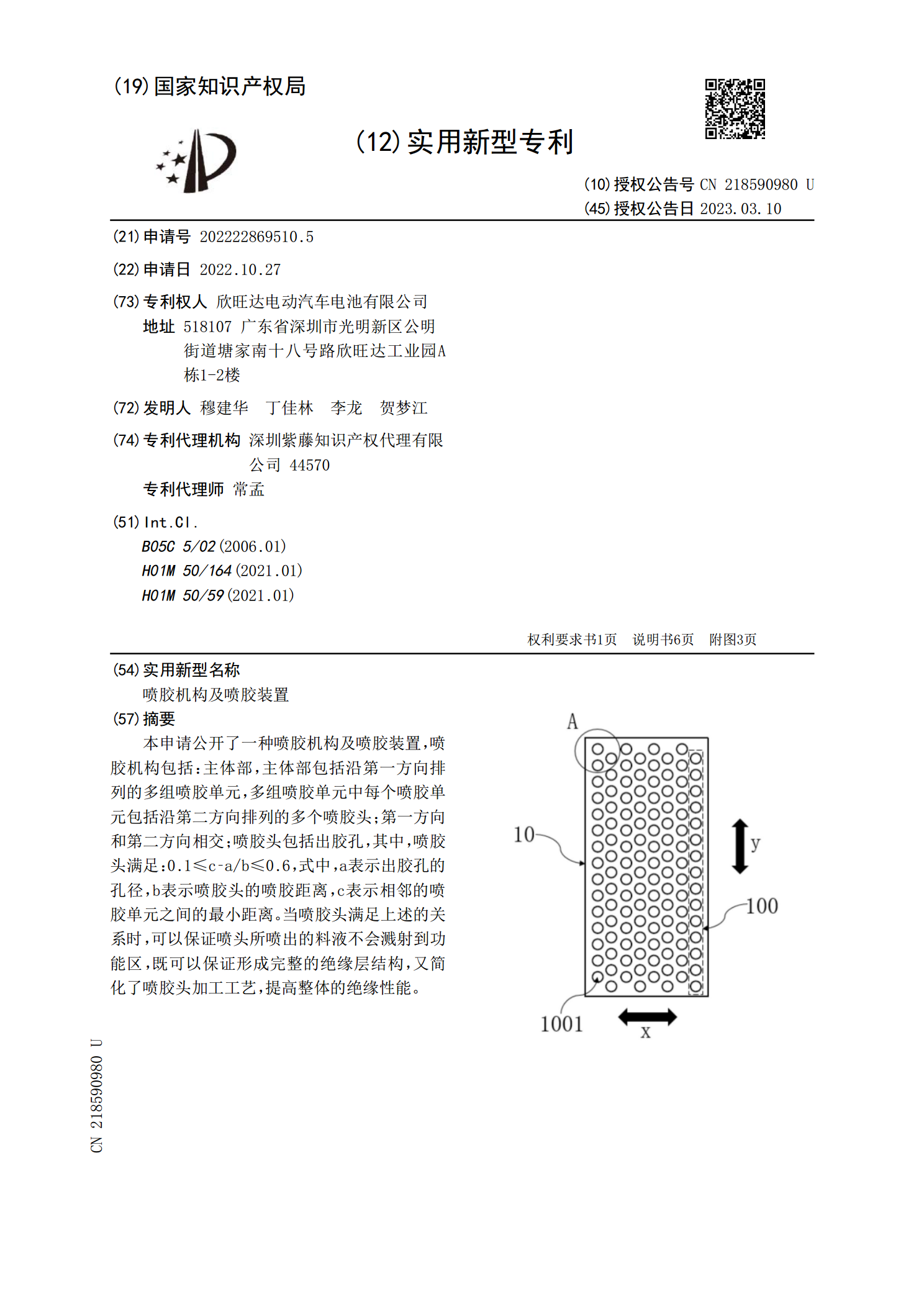
本申请公开了一种喷胶机构及喷胶装置,喷胶机构包括:主体部,主体部包括沿第一方向排列的多组喷胶单元,多组喷胶单元中每个喷胶单元包括沿第二方向排列的多个喷胶头;第一方向和第二方向相交;喷胶头包括出胶孔,其中,喷胶头满足:0.1≤c?a/b≤0.6,式中,a表示出胶孔的孔径,b表示喷胶头的喷胶距离,c表示相邻的喷胶单元之间的最小距离。当喷胶头满足上述的关系时,可以保证喷头所喷出的料液不会溅射到功能区,既可以保证形成完整的绝缘层结构,又简化了喷胶头加工工艺,提高整体的绝缘性能。