
基于点光源衍射星芒现象的星敏感器星点位置定位方法.pdf

小代****回来

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于点光源衍射星芒现象的星敏感器星点位置定位方法.pdf
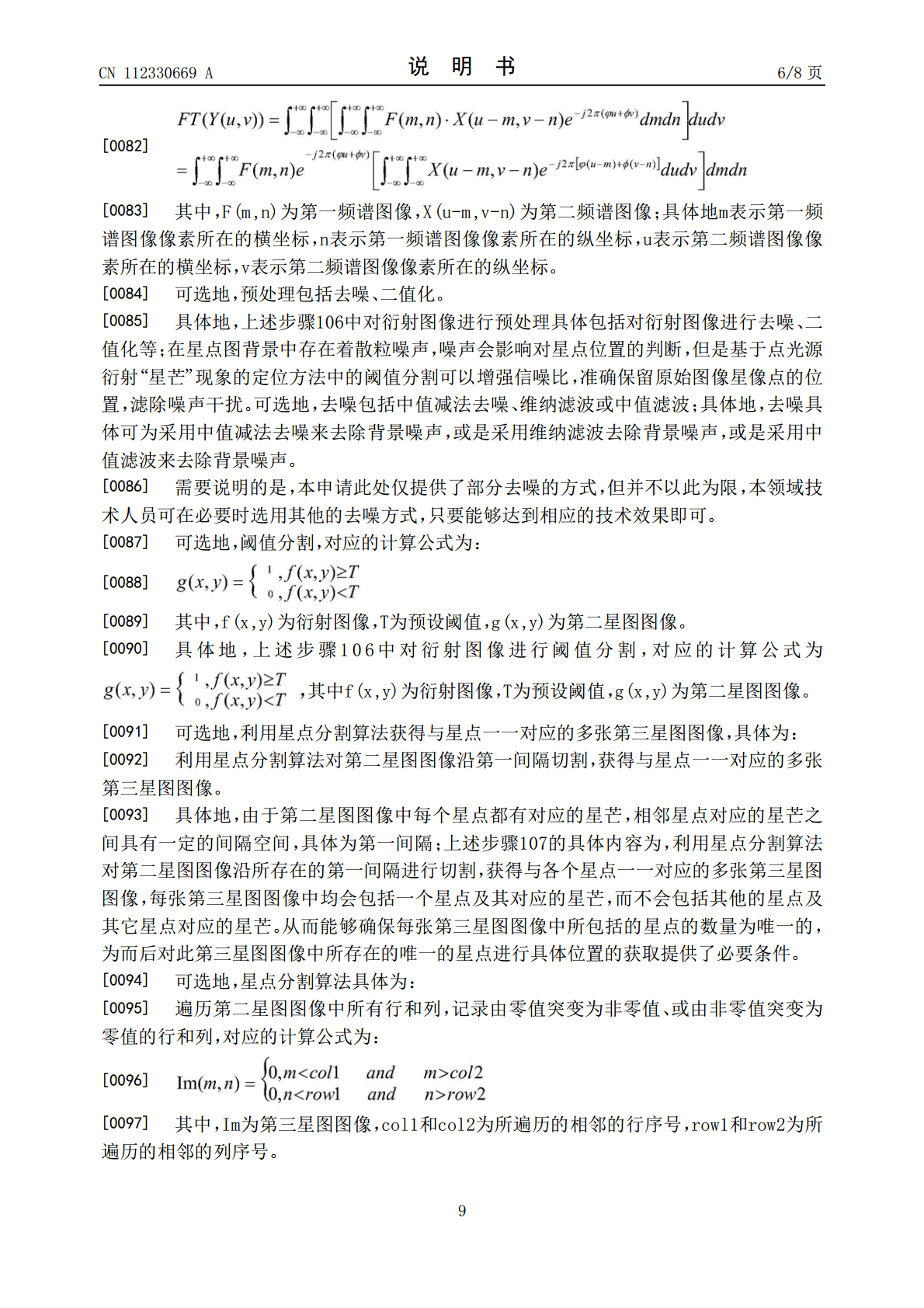
本发明公开了一种基于点光源衍射星芒现象的星敏感器星点位置定位方法,涉及星图识别技术领域。通过星敏感器获取包括多个星点的第一星图图像,并处理后获得相应的第一频谱图像;提供切片式星芒镜并处理后获得切片式星芒镜的图像对应的第二频谱图像;对第一频谱图像和第二频谱图像进行卷积后获得第三频谱图像,并经处理后获得包括星芒的衍射图像;对衍射图像预处理及阈值分割进而生成第二星图图像,利用星点分割算法获得第二星图图像中不同星点对应的多张第三星图图像,进而利用定位算法计算各第三星图图像中星点的位置;即通过上述简洁的步骤和方法,
用于星点位置精确提取的星敏感器点光源衍射星芒装置.pdf
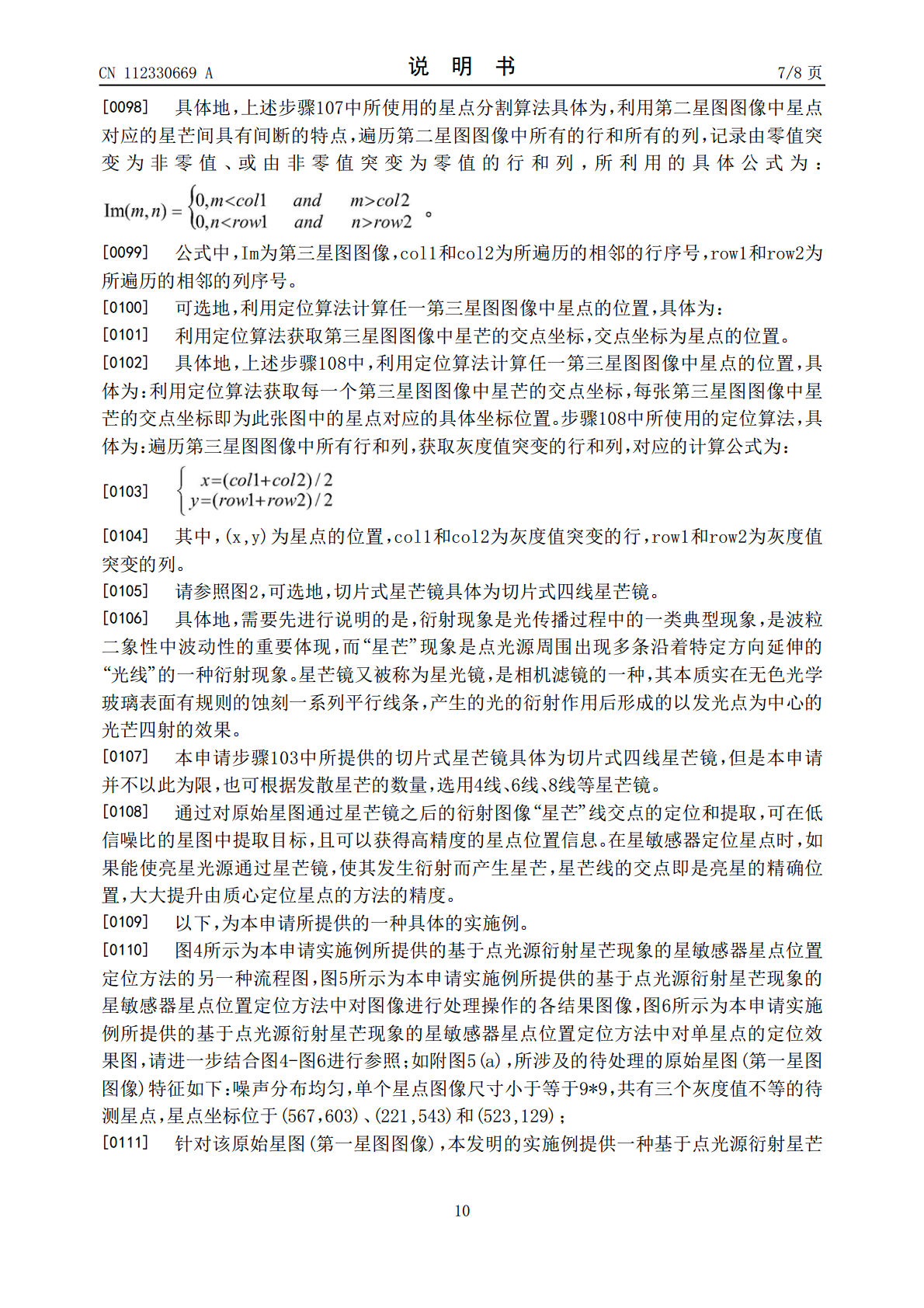
本发明公开了一种用于星点位置精确提取的星敏感器点光源衍射星芒装置,涉及星图识别技术领域,包括:星敏感器本体,包括底座和遮光罩;切片式衍射星芒镜,设置于遮光罩的中空结构中,切片式衍射星芒镜用于采集星点图像并对星点图像进行衍射处理,使星点图像形成星芒图像;CMOS探测器,设置于切片式衍射星芒镜与底座之间;光学镜头组件,设置于遮光罩的中空结构中,且位于切片式衍射星芒镜和CMOS探测器之间;信号处理器,与CMOS探测器电连接,用于接收CMOS探测器发送的电信号,并根据电信号计算星芒图像中的星点位置。如此,有利于提

基于时域约束的卷帘曝光星敏感器星点校正方法.docx
基于时域约束的卷帘曝光星敏感器星点校正方法基于时域约束的卷帘曝光星敏感器星点校正方法摘要:卷帘曝光星敏感器是一种常用于空间任务中的星敏感器,其可以通过监测星点的光强来实现导航和定位功能。然而,由于多种因素的影响,卷帘曝光星敏感器会出现星点位置偏差的问题,降低了测量精度。因此,需设计一种有效的星点校正方法来提高星敏感器的精度。本论文提出了一种基于时域约束的卷帘曝光星敏感器星点校正方法,该方法通过时域处理来实现星点位置的准确校正。实验结果表明,该方法能够有效地提高星敏感器的精度。关键词:卷帘曝光,星敏感器,星

基于星像位置误差估计星敏感器姿态角偏差的方法.pptx
汇报人:CONTENTS星敏感器姿态角偏差估计方法星像位置误差的来源星敏感器姿态角偏差的估计方法估计方法的精度分析基于星像位置误差的姿态角偏差估计星像位置误差的测量姿态角偏差的估计估计结果的验证姿态角偏差对星敏感器性能的影响姿态角偏差对星敏感器定位精度的影响姿态角偏差对星敏感器稳定性的影响姿态角偏差对星敏感器测量精度的影响姿态角偏差的补偿方法基于硬件的补偿方法基于软件的补偿方法补偿方法的比较与选择姿态角偏差估计与补偿的应用前景在卫星导航系统中的应用前景在航天器自主导航中的应用前景在深空探测中的应用前景汇报

基于最优背景估计的星敏感器抗杂散光星点提取方法.pptx
添加副标题目录PART01星敏感器的作用杂散光对星敏感器的影响最优背景估计的意义PART02背景估计方法分类最优背景估计方法的选取最优背景估计方法的实现过程PART03杂散光产生的原因抗杂散光星点提取方法的原理抗杂散光星点提取方法的实现过程PART04实验设置与数据采集实验结果展示结果分析PART05结论总结未来研究方向感谢您的观看