
一种无人机智能精确捕鱼系统及其实现方法.pdf

邻家****66


1/7
2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种无人机智能精确捕鱼系统及其实现方法.pdf
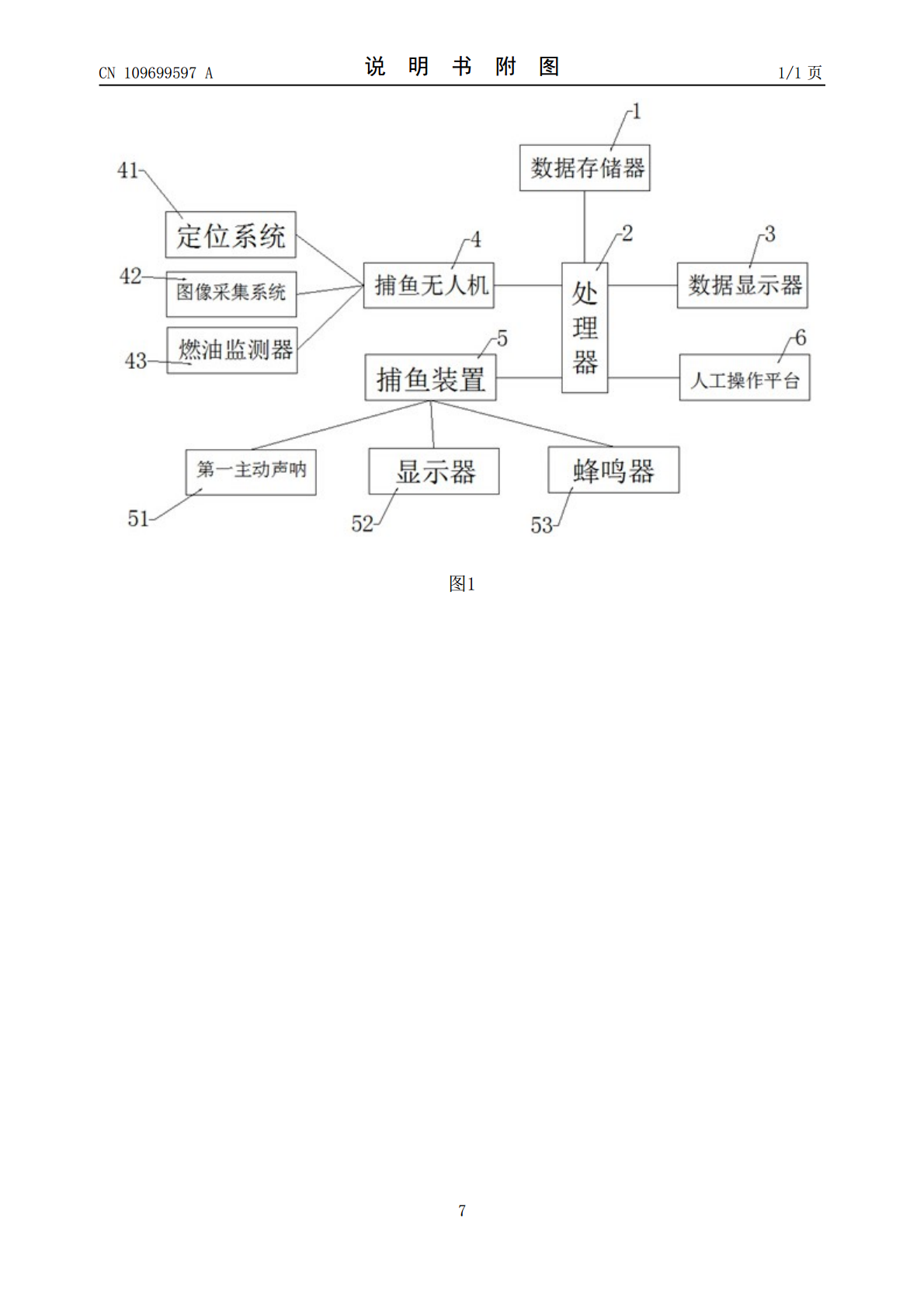
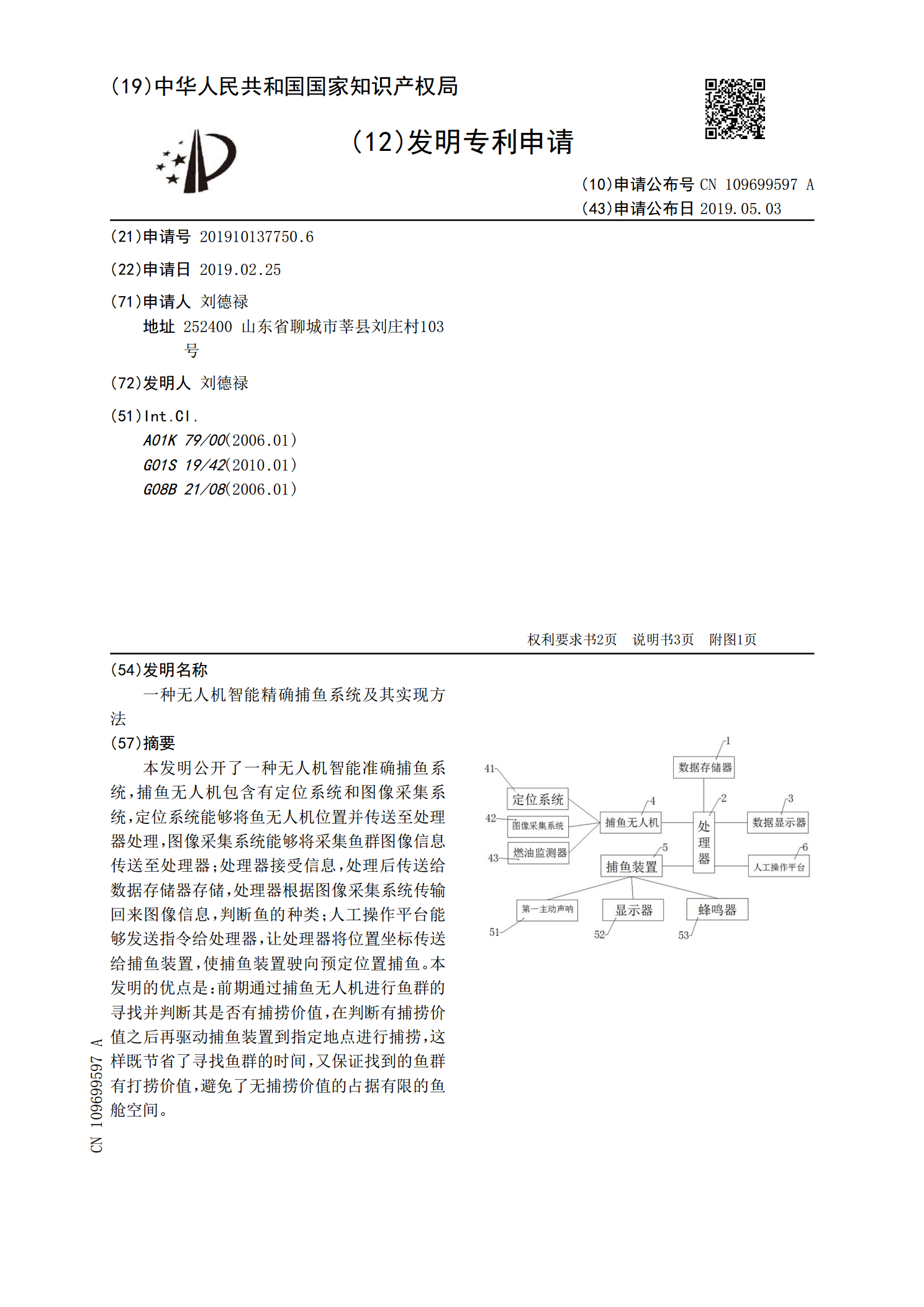
本发明公开了一种无人机智能准确捕鱼系统,捕鱼无人机包含有定位系统和图像采集系统,定位系统能够将鱼无人机位置并传送至处理器处理,图像采集系统能够将采集鱼群图像信息传送至处理器;处理器接受信息,处理后传送给数据存储器存储,处理器根据图像采集系统传输回来图像信息,判断鱼的种类;人工操作平台能够发送指令给处理器,让处理器将位置坐标传送给捕鱼装置,使捕鱼装置驶向预定位置捕鱼。本发明的优点是:前期通过捕鱼无人机进行鱼群的寻找并判断其是否有捕捞价值,在判断有捕捞价值之后再驱动捕鱼装置到指定地点进行捕捞,这样既节省了寻找
一种无人机智能精确捕鱼器.pdf
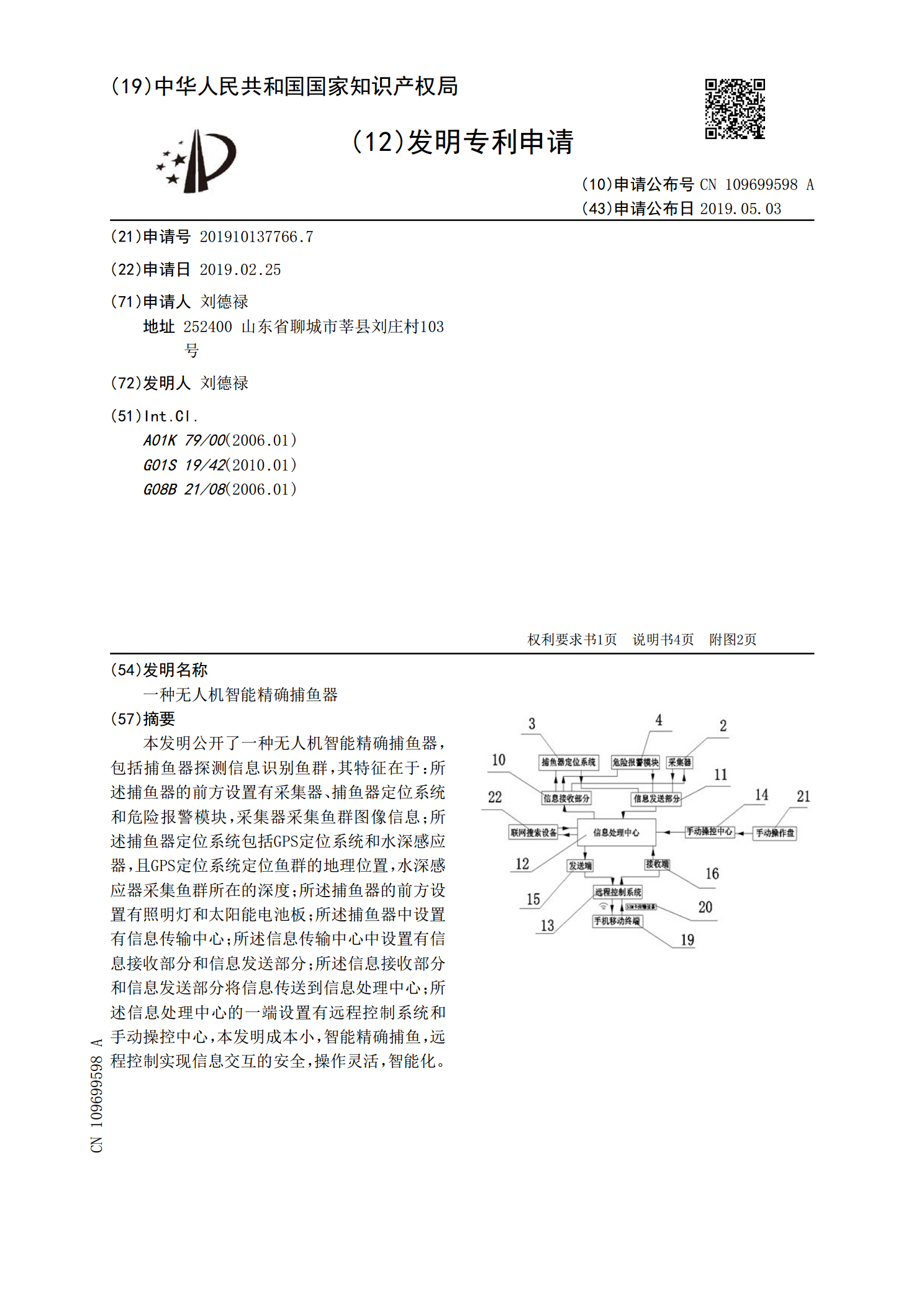
本发明公开了一种无人机智能精确捕鱼器,包括捕鱼器探测信息识别鱼群,其特征在于:所述捕鱼器的前方设置有采集器、捕鱼器定位系统和危险报警模块,采集器采集鱼群图像信息;所述捕鱼器定位系统包括GPS定位系统和水深感应器,且GPS定位系统定位鱼群的地理位置,水深感应器采集鱼群所在的深度;所述捕鱼器的前方设置有照明灯和太阳能电池板;所述捕鱼器中设置有信息传输中心;所述信息传输中心中设置有信息接收部分和信息发送部分;所述信息接收部分和信息发送部分将信息传送到信息处理中心;所述信息处理中心的一端设置有远程控制系统和手动操
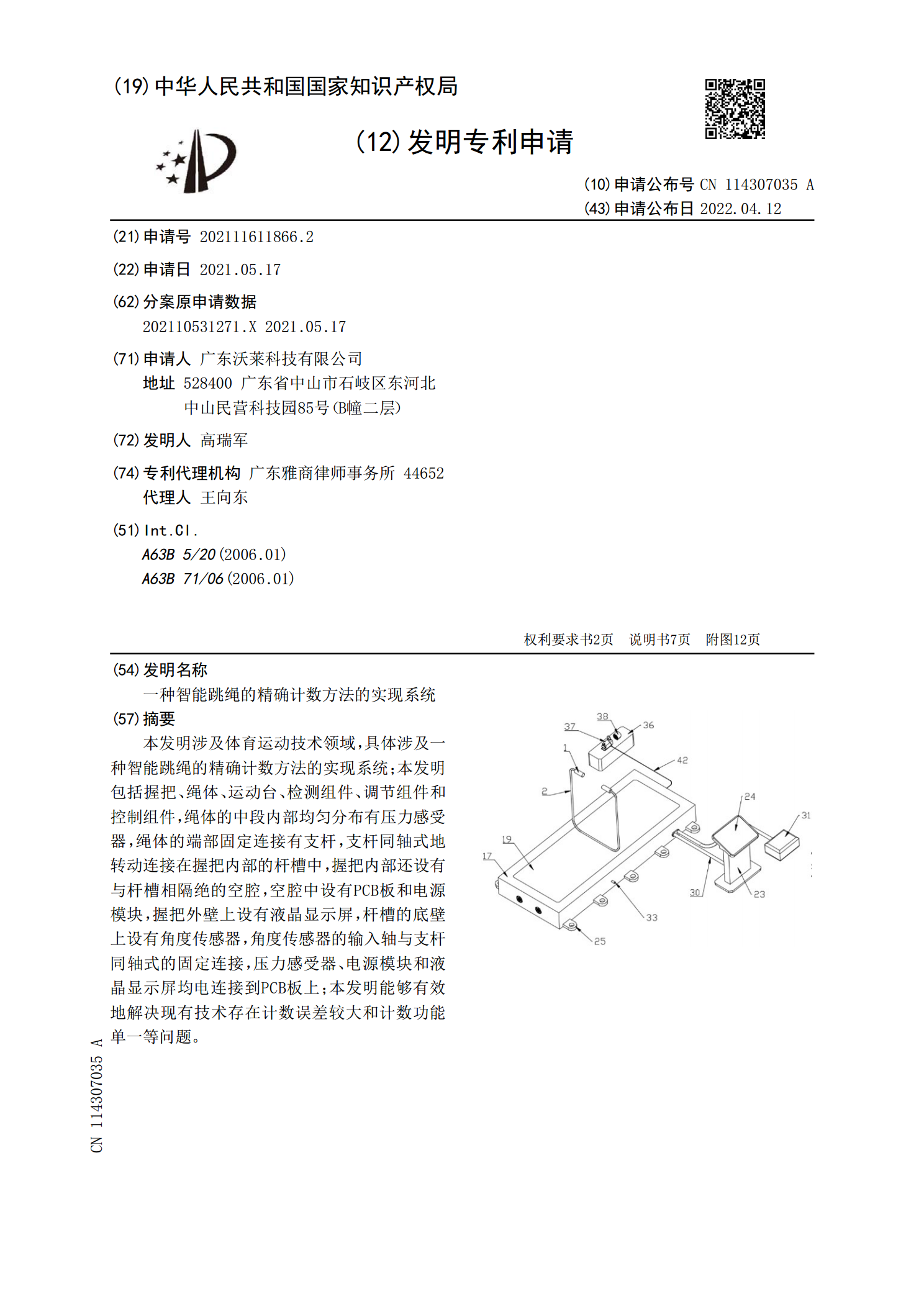
一种智能跳绳的精确计数方法的实现系统.pdf
本发明涉及体育运动技术领域,具体涉及一种智能跳绳的精确计数方法的实现系统;本发明包括握把、绳体、运动台、检测组件、调节组件和控制组件,绳体的中段内部均匀分布有压力感受器,绳体的端部固定连接有支杆,支杆同轴式地转动连接在握把内部的杆槽中,握把内部还设有与杆槽相隔绝的空腔,空腔中设有PCB板和电源模块,握把外壁上设有液晶显示屏,杆槽的底壁上设有角度传感器,角度传感器的输入轴与支杆同轴式的固定连接,压力感受器、电源模块和液晶显示屏均电连接到PCB板上;本发明能够有效地解决现有技术存在计数误差较大和计数功能单一等
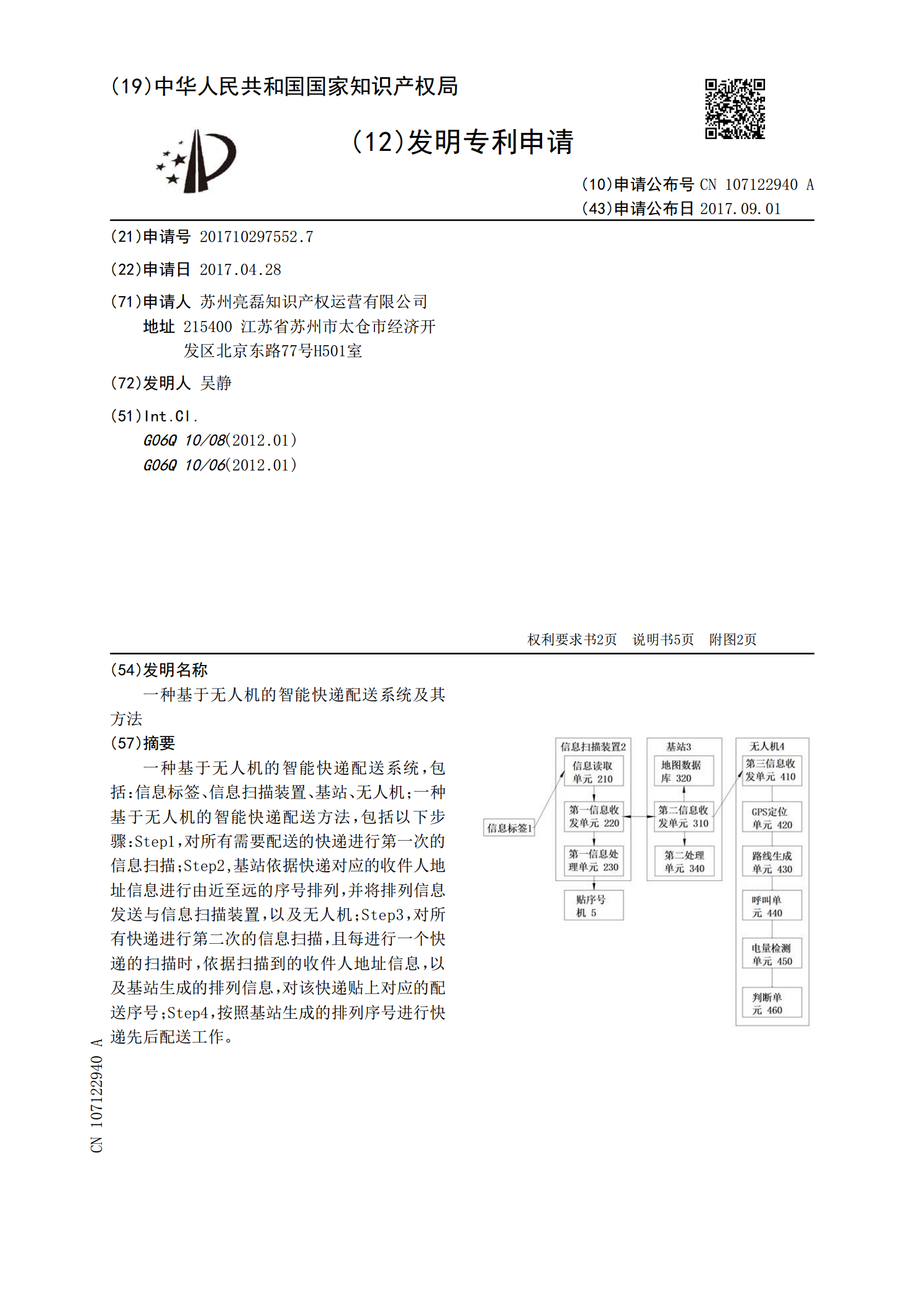
一种基于无人机的智能快递配送系统及其方法.pdf
一种基于无人机的智能快递配送系统,包括:信息标签、信息扫描装置、基站、无人机;一种基于无人机的智能快递配送方法,包括以下步骤:Step1,对所有需要配送的快递进行第一次的信息扫描;Step2,基站依据快递对应的收件人地址信息进行由近至远的序号排列,并将排列信息发送与信息扫描装置,以及无人机;Step3,对所有快递进行第二次的信息扫描,且每进行一个快递的扫描时,依据扫描到的收件人地址信息,以及基站生成的排列信息,对该快递贴上对应的配送序号;Step4,按照基站生成的排列序号进行快递先后配送工作。
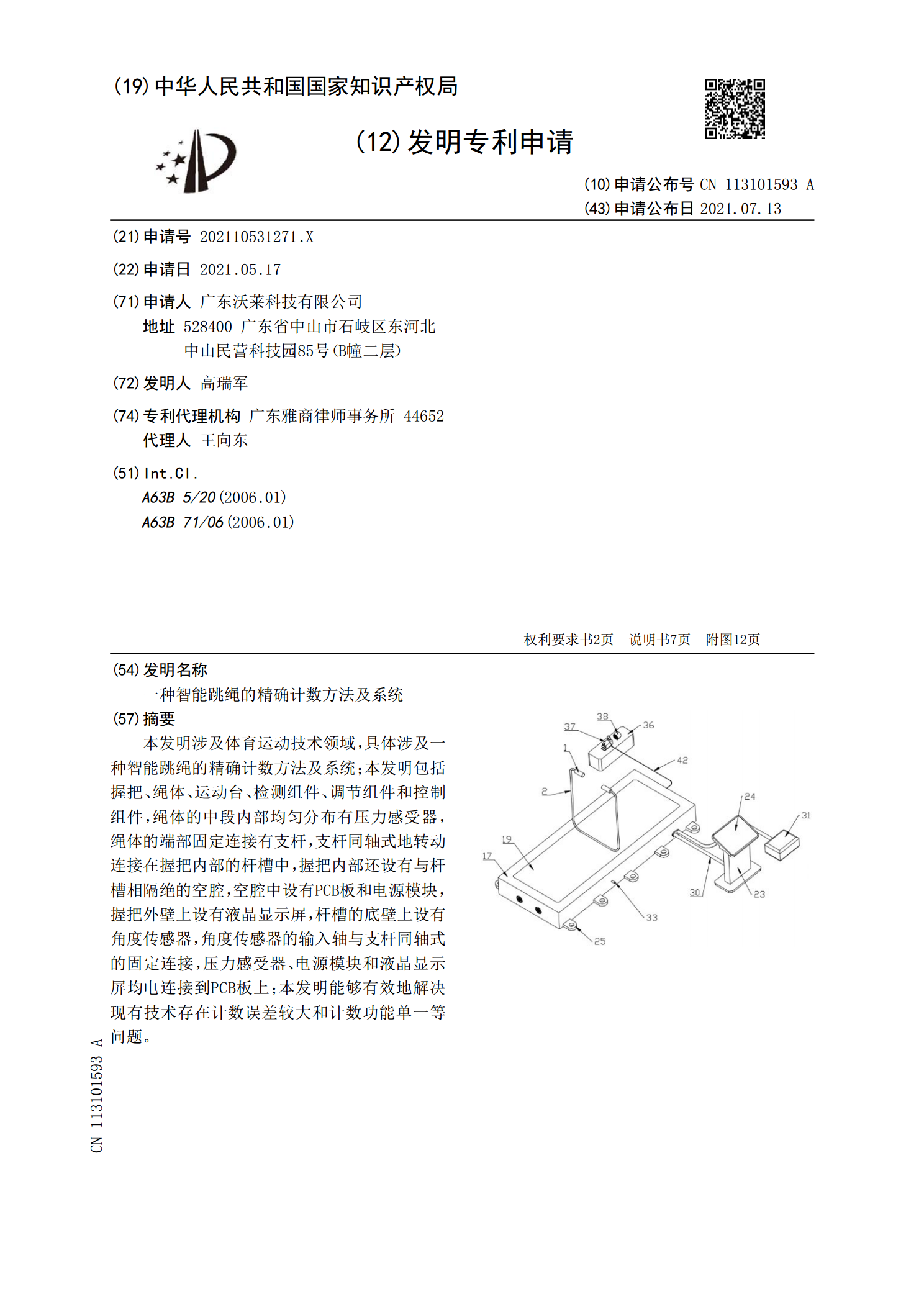
一种智能跳绳的精确计数方法及系统.pdf
本发明涉及体育运动技术领域,具体涉及一种智能跳绳的精确计数方法及系统;本发明包括握把、绳体、运动台、检测组件、调节组件和控制组件,绳体的中段内部均匀分布有压力感受器,绳体的端部固定连接有支杆,支杆同轴式地转动连接在握把内部的杆槽中,握把内部还设有与杆槽相隔绝的空腔,空腔中设有PCB板和电源模块,握把外壁上设有液晶显示屏,杆槽的底壁上设有角度传感器,角度传感器的输入轴与支杆同轴式的固定连接,压力感受器、电源模块和液晶显示屏均电连接到PCB板上;本发明能够有效地解决现有技术存在计数误差较大和计数功能单一等问题