
一种多功能护理床电动双摇装置.pdf

韶敏****ab

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种多功能护理床电动双摇装置.pdf
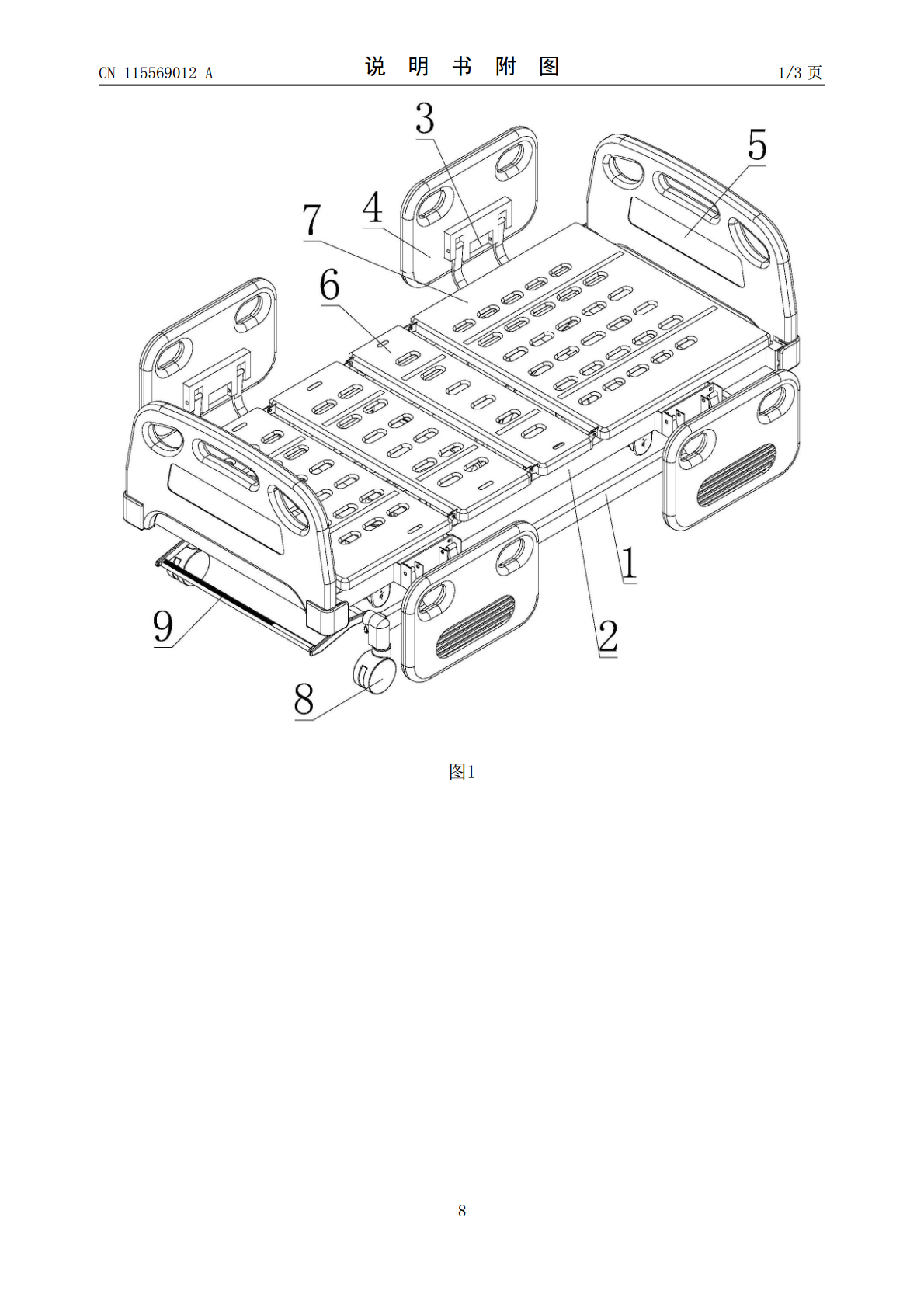
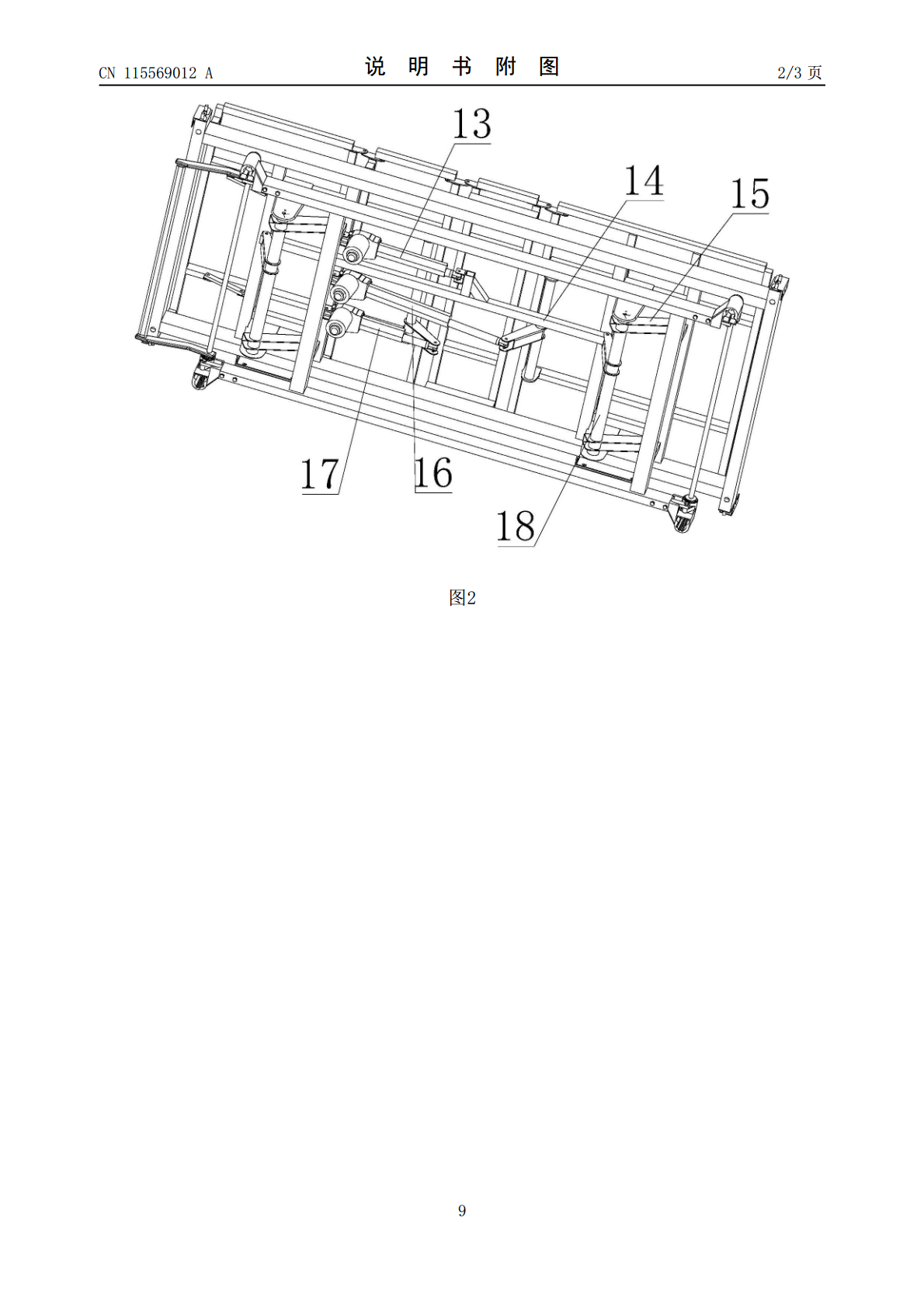
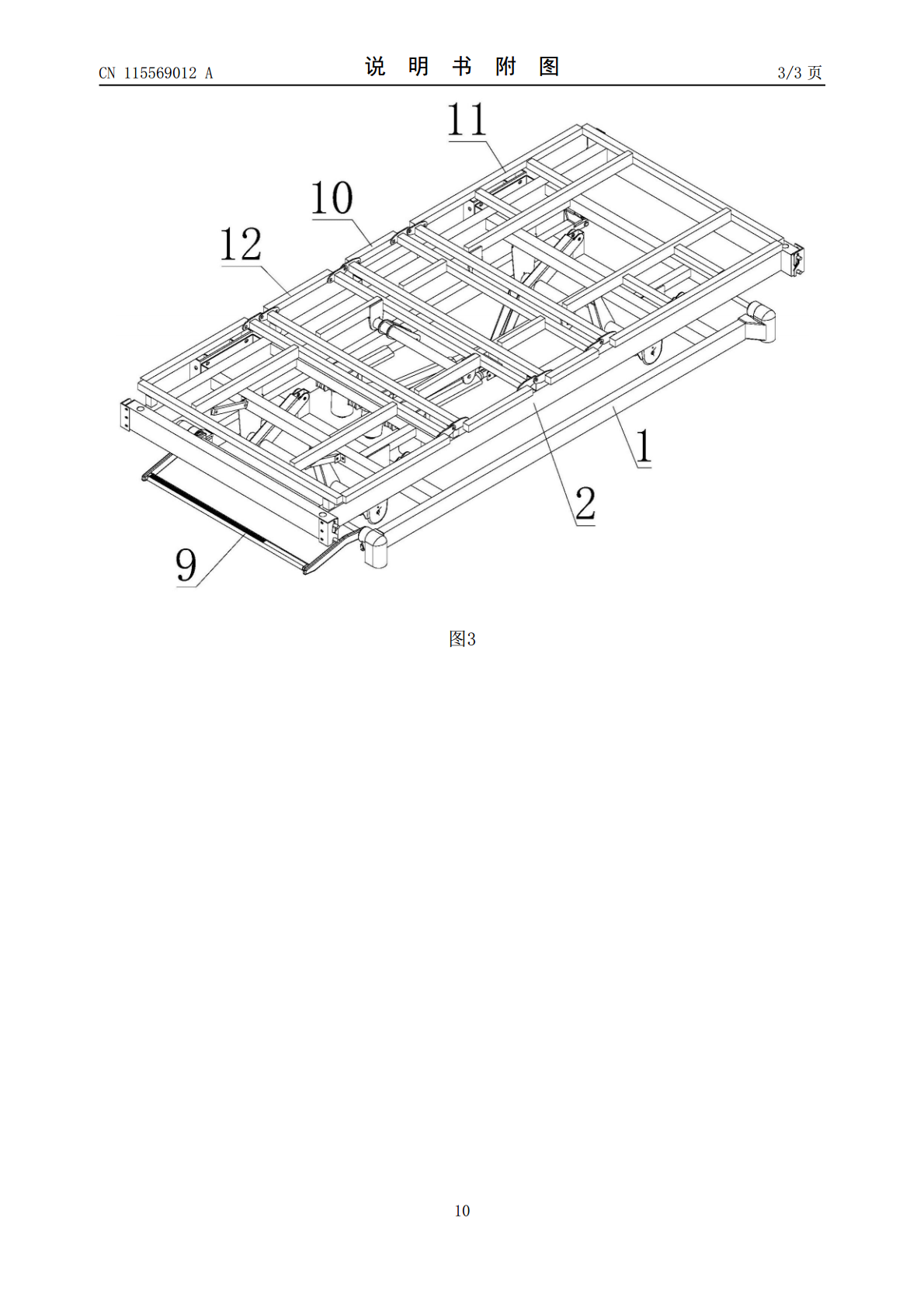
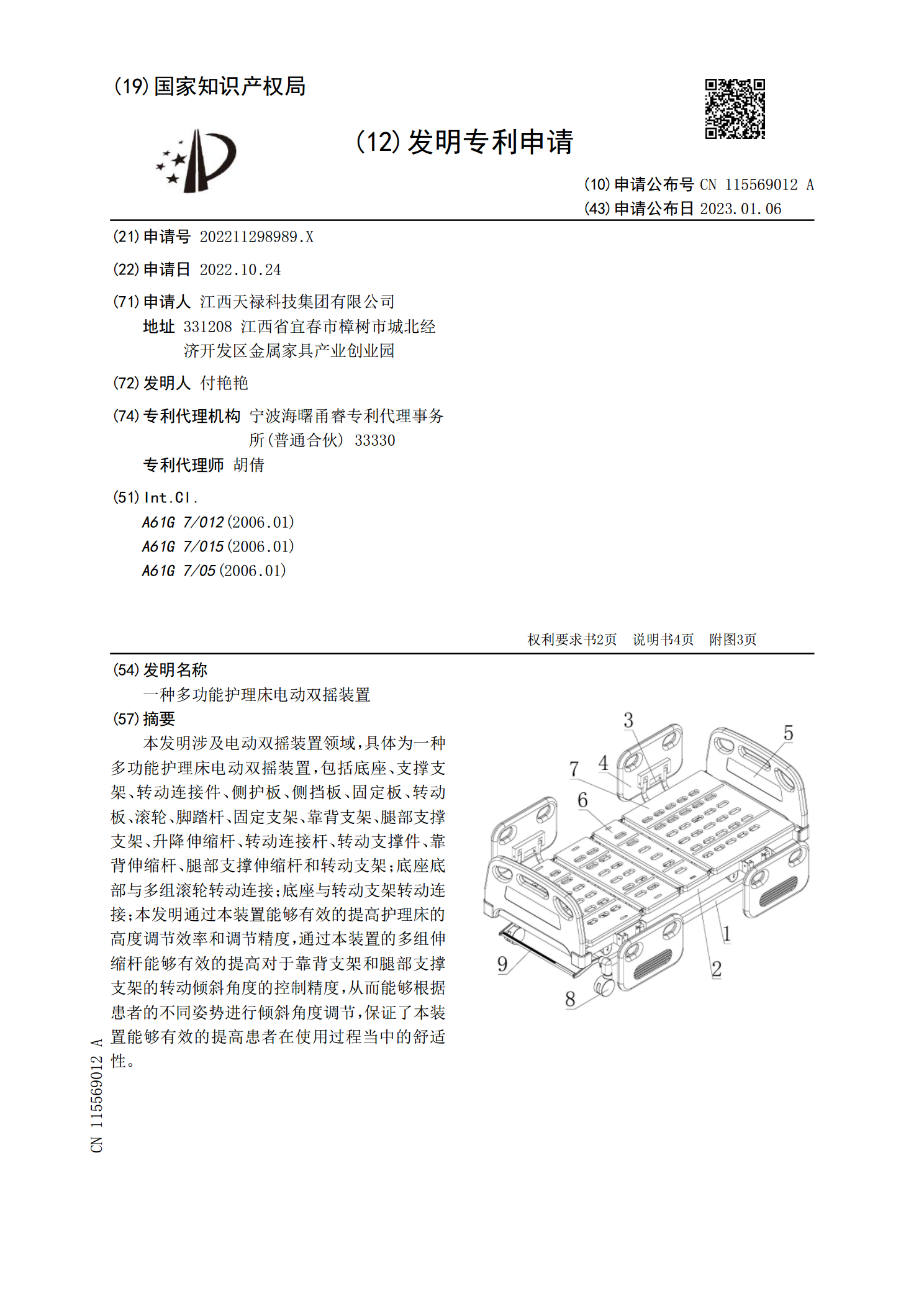
本发明涉及电动双摇装置领域,具体为一种多功能护理床电动双摇装置,包括底座、支撑支架、转动连接件、侧护板、侧挡板、固定板、转动板、滚轮、脚踏杆、固定支架、靠背支架、腿部支撑支架、升降伸缩杆、转动连接杆、转动支撑件、靠背伸缩杆、腿部支撑伸缩杆和转动支架;底座底部与多组滚轮转动连接;底座与转动支架转动连接;本发明通过本装置能够有效的提高护理床的高度调节效率和调节精度,通过本装置的多组伸缩杆能够有效的提高对于靠背支架和腿部支撑支架的转动倾斜角度的控制精度,从而能够根据患者的不同姿势进行倾斜角度调节,保证了本装置能
一种多功能家庭侧翻身双摇护理床.pdf
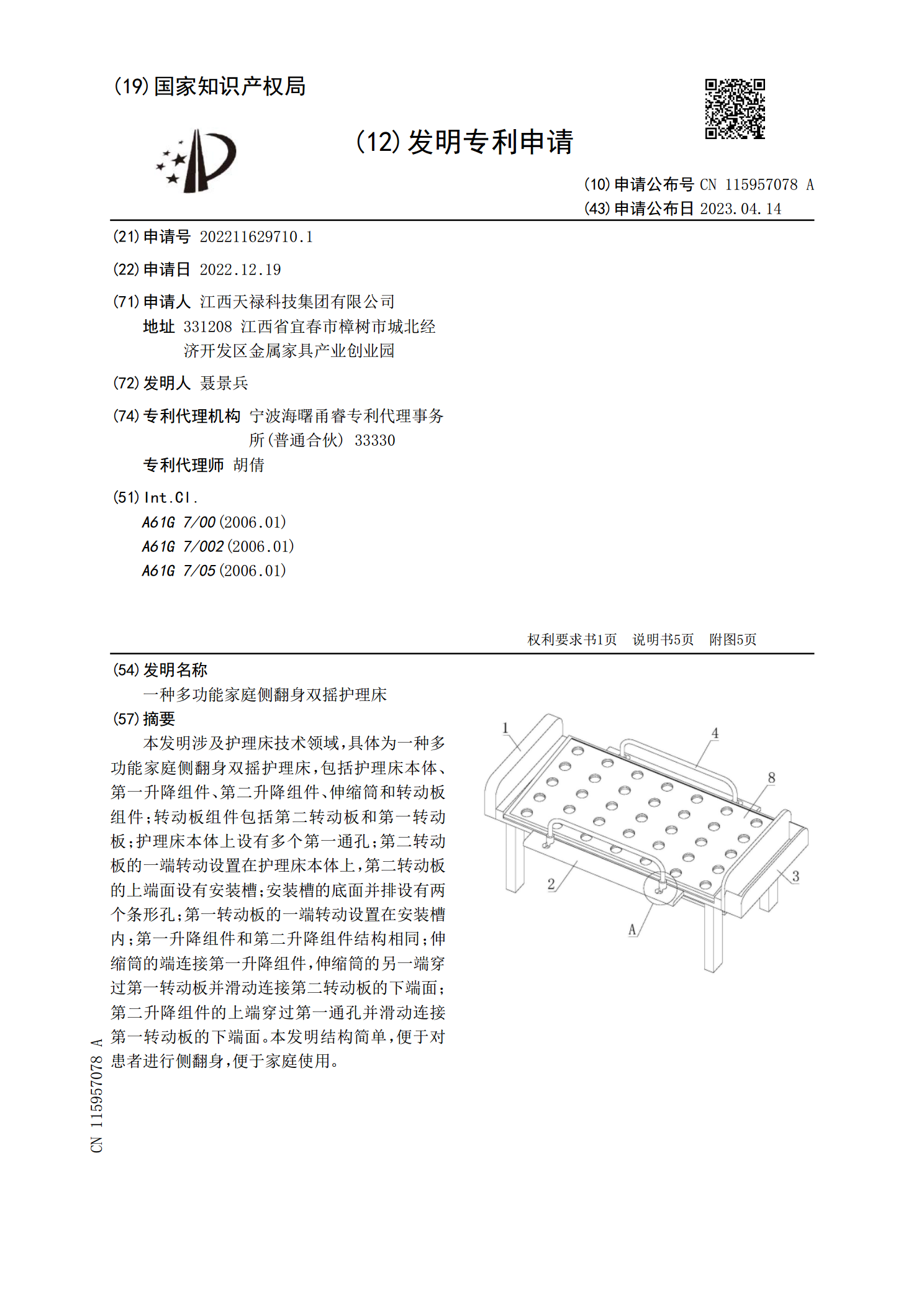
本发明涉及护理床技术领域,具体为一种多功能家庭侧翻身双摇护理床,包括护理床本体、第一升降组件、第二升降组件、伸缩筒和转动板组件;转动板组件包括第二转动板和第一转动板;护理床本体上设有多个第一通孔;第二转动板的一端转动设置在护理床本体上,第二转动板的上端面设有安装槽;安装槽的底面并排设有两个条形孔;第一转动板的一端转动设置在安装槽内;第一升降组件和第二升降组件结构相同;伸缩筒的端连接第一升降组件,伸缩筒的另一端穿过第一转动板并滑动连接第二转动板的下端面;第二升降组件的上端穿过第一通孔并滑动连接第一转动板的下
一种多功能电动护理床.pdf
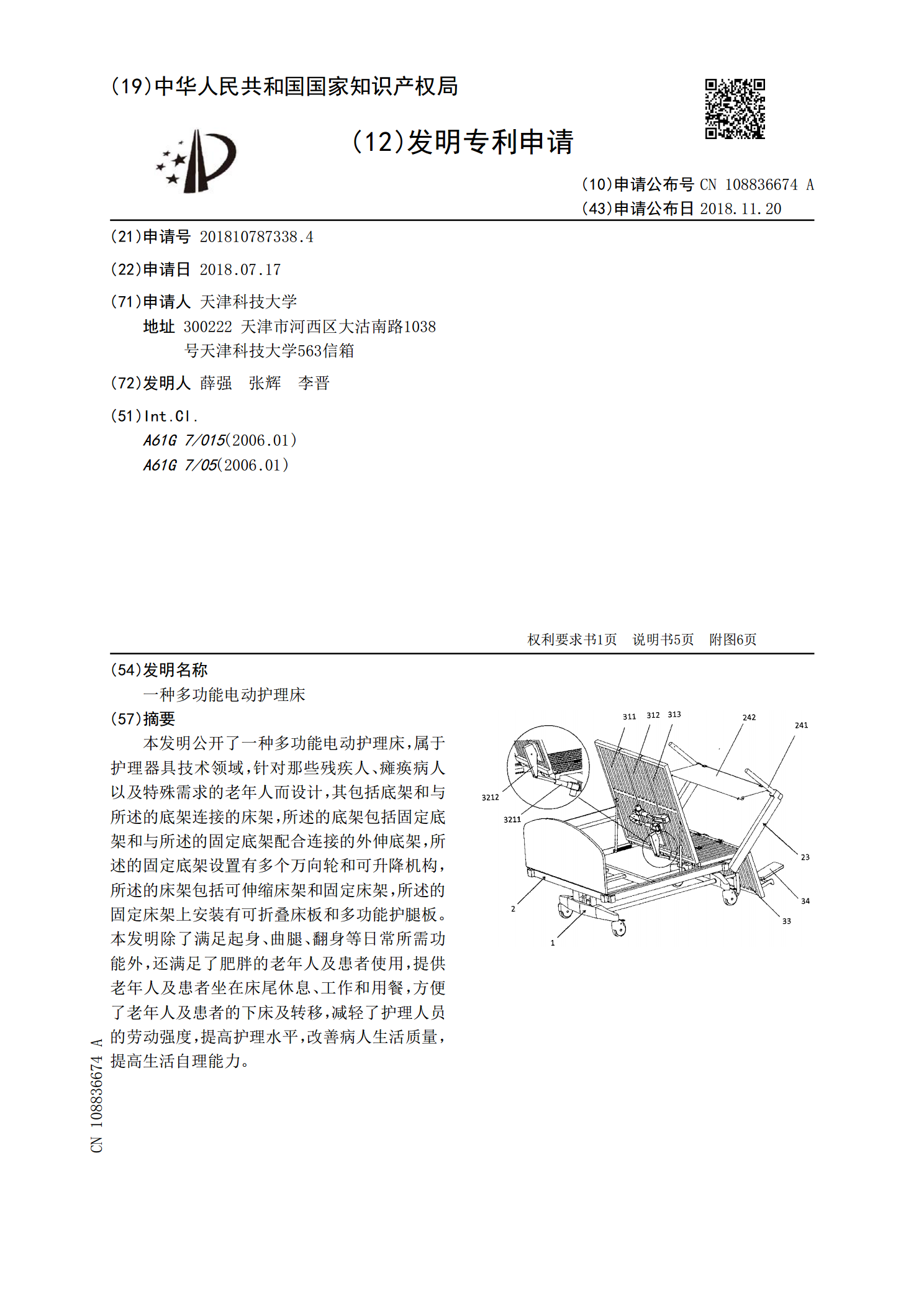
本发明公开了一种多功能电动护理床,属于护理器具技术领域,针对那些残疾人、瘫痪病人以及特殊需求的老年人而设计,其包括底架和与所述的底架连接的床架,所述的底架包括固定底架和与所述的固定底架配合连接的外伸底架,所述的固定底架设置有多个万向轮和可升降机构,所述的床架包括可伸缩床架和固定床架,所述的固定床架上安装有可折叠床板和多功能护腿板。本发明除了满足起身、曲腿、翻身等日常所需功能外,还满足了肥胖的老年人及患者使用,提供老年人及患者坐在床尾休息、工作和用餐,方便了老年人及患者的下床及转移,减轻了护理人员的劳动强度
一种新型多功能电动护理床.pdf
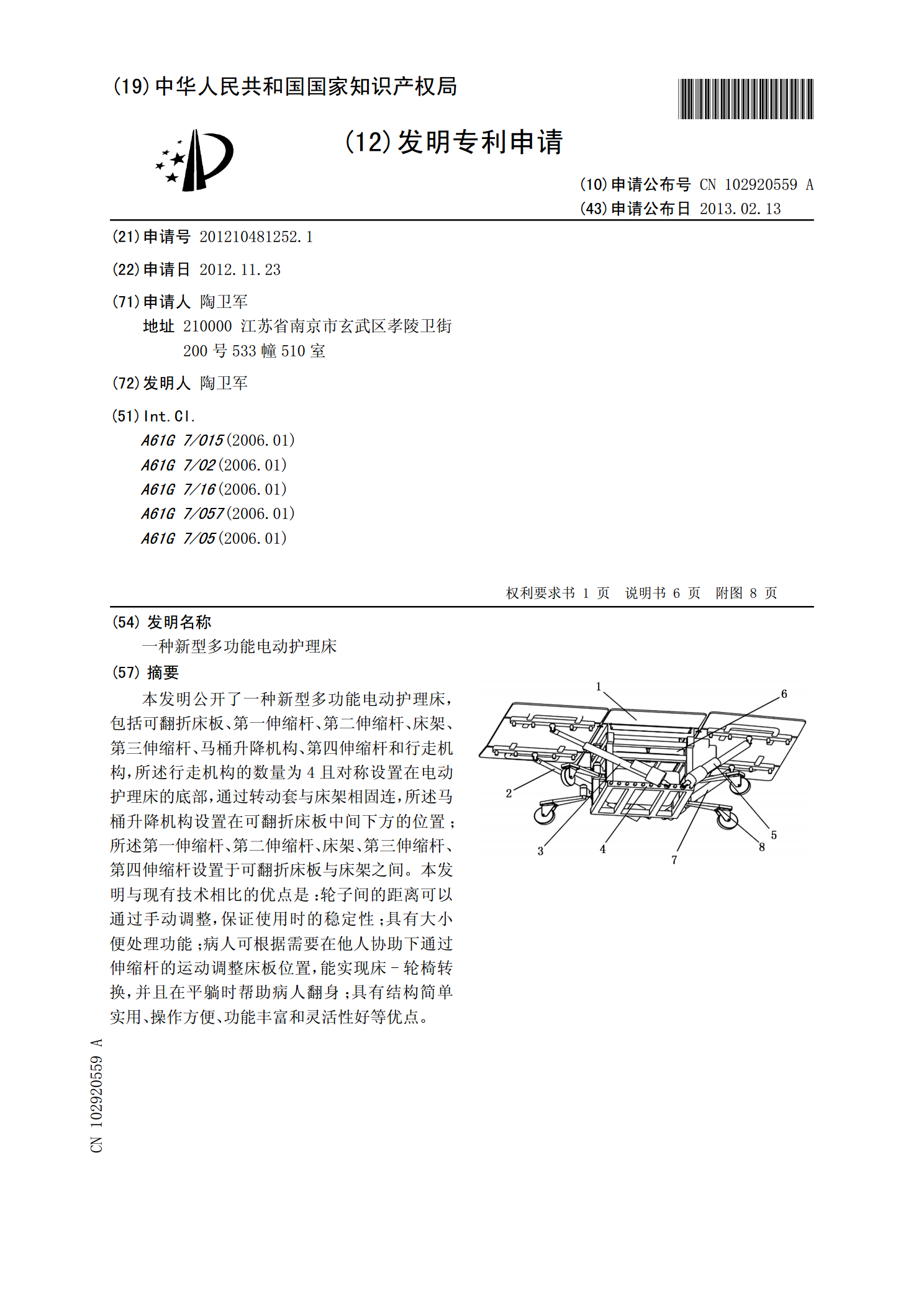
本发明公开了一种新型多功能电动护理床,包括可翻折床板、第一伸缩杆、第二伸缩杆、床架、第三伸缩杆、马桶升降机构、第四伸缩杆和行走机构,所述行走机构的数量为4且对称设置在电动护理床的底部,通过转动套与床架相固连,所述马桶升降机构设置在可翻折床板中间下方的位置;所述第一伸缩杆、第二伸缩杆、床架、第三伸缩杆、第四伸缩杆设置于可翻折床板与床架之间。本发明与现有技术相比的优点是:轮子间的距离可以通过手动调整,保证使用时的稳定性;具有大小便处理功能;病人可根据需要在他人协助下通过伸缩杆的运动调整床板位置,能实现床-轮椅

自动折叠电动多功能护理床.pdf
本发明公开的自动折叠电动多功能护理床,包括床头、床尾、上身床架、臀部床架、下身床架、腿支架和靠背支架,腿支架位于下身床架上,靠背支架铰链连接在上身床架上,还包括主电机、上身折叠传动杆、下身折叠传动杆和可伸缩的电机出力杆;上身床架一端与第一安装座铰链连接、另一端与臀部床架铰链连接;下身床架一端与第二安装座铰链连接、另一端与臀部床架铰链连接;主电机铰链连接在第一安装座上且倾斜设置在上身床架下方;电机出力杆一端与主电机传动连接、另一端铰链连接在靠背支架上;上身折叠传动杆和下身折叠传动杆的端部都设有齿轮且相互啮合