
蜂窝构造体的运送装置及蜂窝构造体的封口方法、以及蜂窝构造体的制造方法.pdf

丹烟****魔王

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
蜂窝构造体的运送装置及蜂窝构造体的封口方法、以及蜂窝构造体的制造方法.pdf
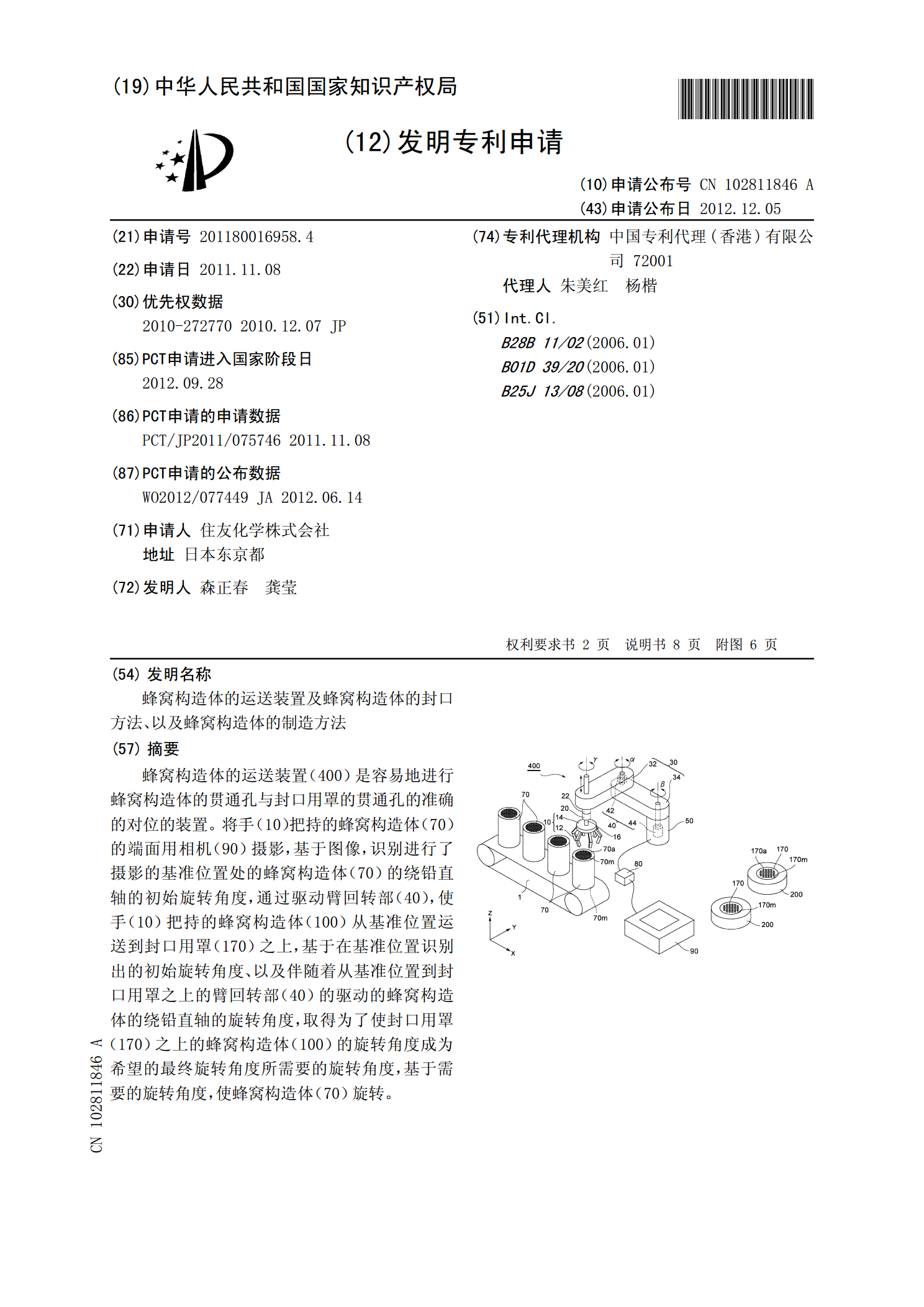
蜂窝构造体的运送装置(400)是容易地进行蜂窝构造体的贯通孔与封口用罩的贯通孔的准确的对位的装置。将手(10)把持的蜂窝构造体(70)的端面用相机(90)摄影,基于图像,识别进行了摄影的基准位置处的蜂窝构造体(70)的绕铅直轴的初始旋转角度,通过驱动臂回转部(40),使手(10)把持的蜂窝构造体(100)从基准位置运送到封口用罩(170)之上,基于在基准位置识别出的初始旋转角度、以及伴随着从基准位置到封口用罩之上的臂回转部(40)的驱动的蜂窝构造体的绕铅直轴的旋转角度,取得为了使封口用罩(170)之上的蜂
蜂窝构造体封口用掩模和使用该掩模的蜂窝构造体的封口方法.pdf
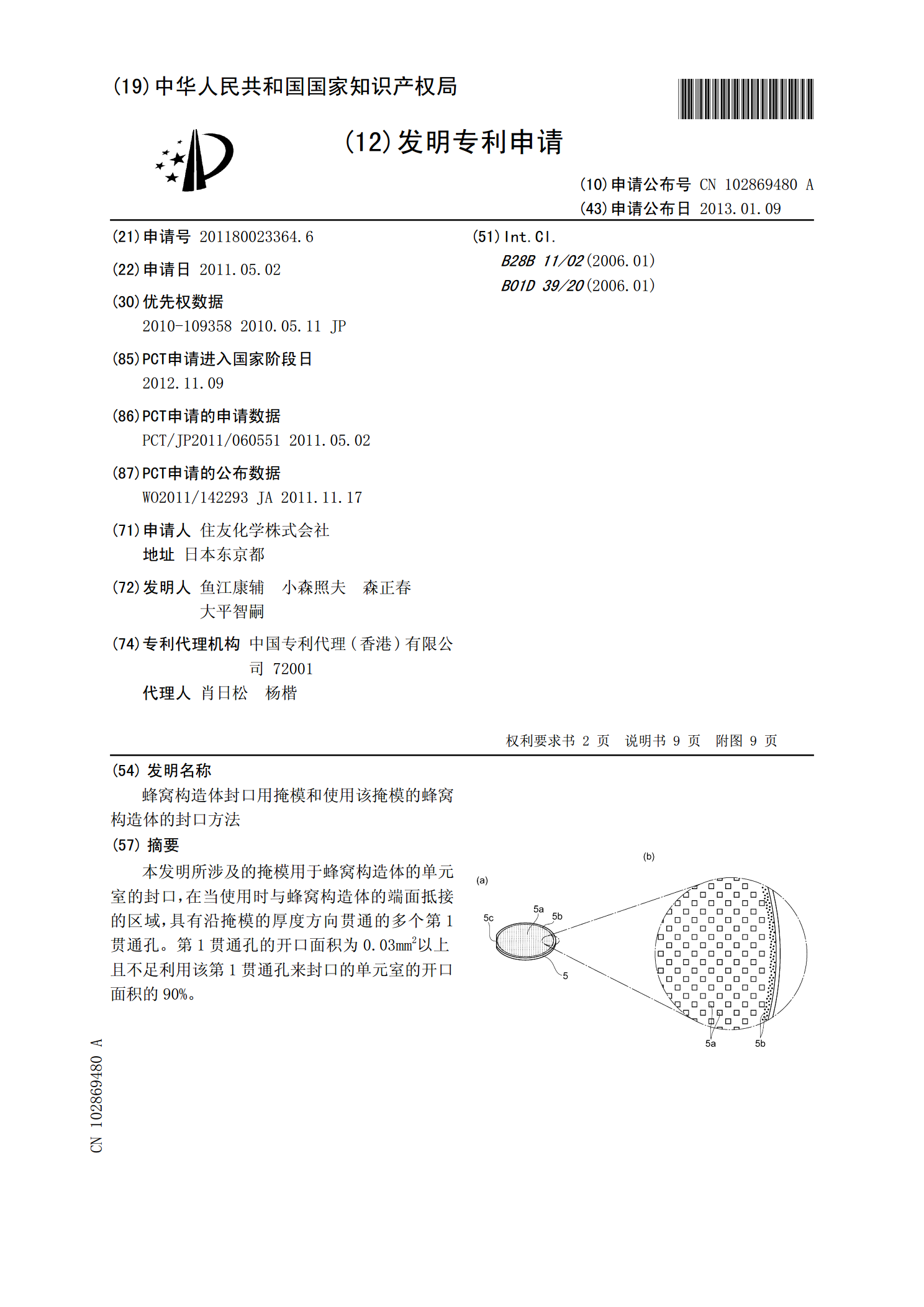
本发明所涉及的掩模用于蜂窝构造体的单元室的封口,在当使用时与蜂窝构造体的端面抵接的区域,具有沿掩模的厚度方向贯通的多个第1贯通孔。第1贯通孔的开口面积为0.03mm2以上且不足利用该第1贯通孔来封口的单元室的开口面积的90%。
蜂窝构造体的制造方法.pdf
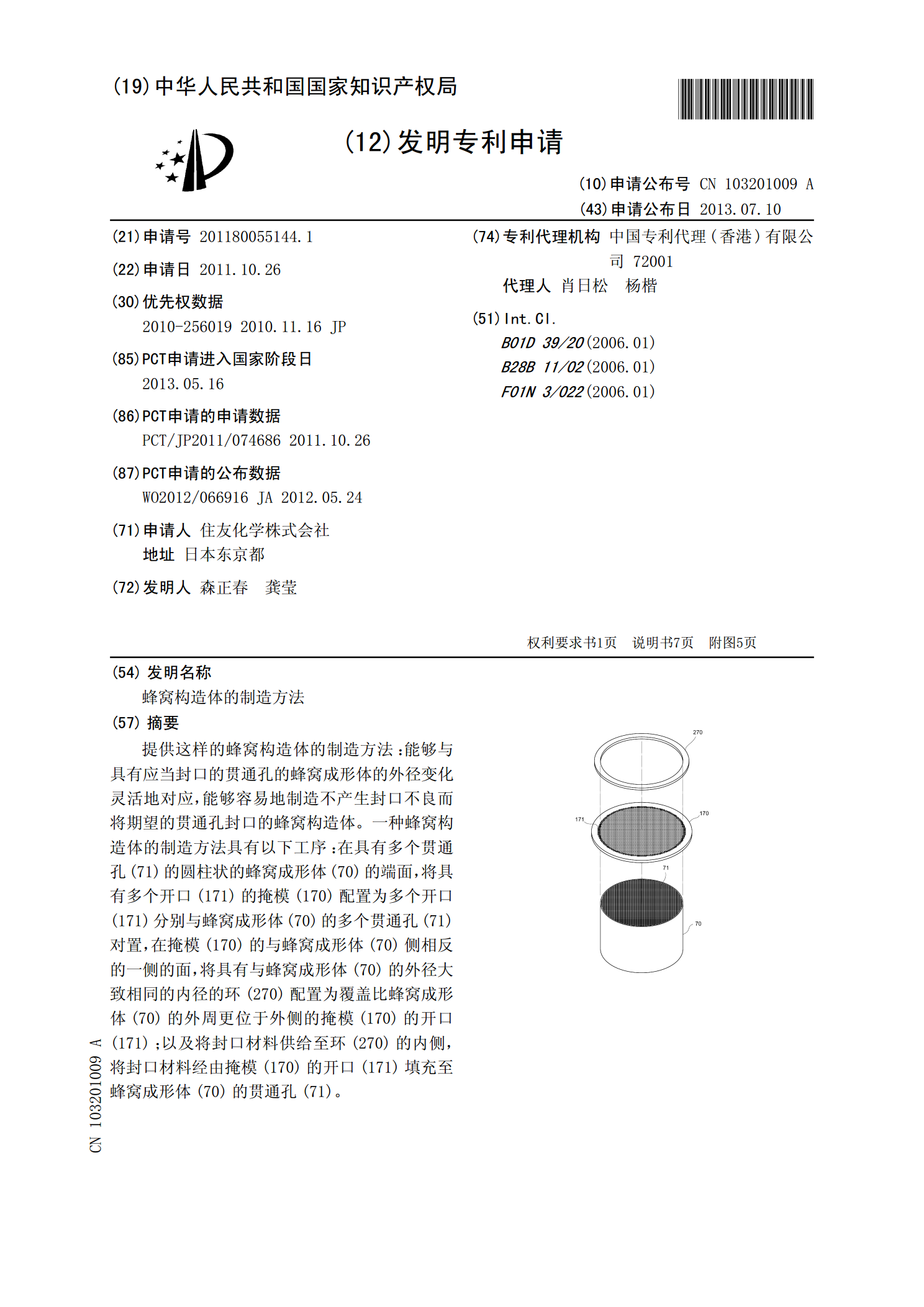
提供这样的蜂窝构造体的制造方法:能够与具有应当封口的贯通孔的蜂窝成形体的外径变化灵活地对应,能够容易地制造不产生封口不良而将期望的贯通孔封口的蜂窝构造体。一种蜂窝构造体的制造方法具有以下工序:在具有多个贯通孔(71)的圆柱状的蜂窝成形体(70)的端面,将具有多个开口(171)的掩模(170)配置为多个开口(171)分别与蜂窝成形体(70)的多个贯通孔(71)对置,在掩模(170)的与蜂窝成形体(70)侧相反的一侧的面,将具有与蜂窝成形体(70)的外径大致相同的内径的环(270)配置为覆盖比蜂窝成形体(70
蜂窝构造体的制造方法.pdf
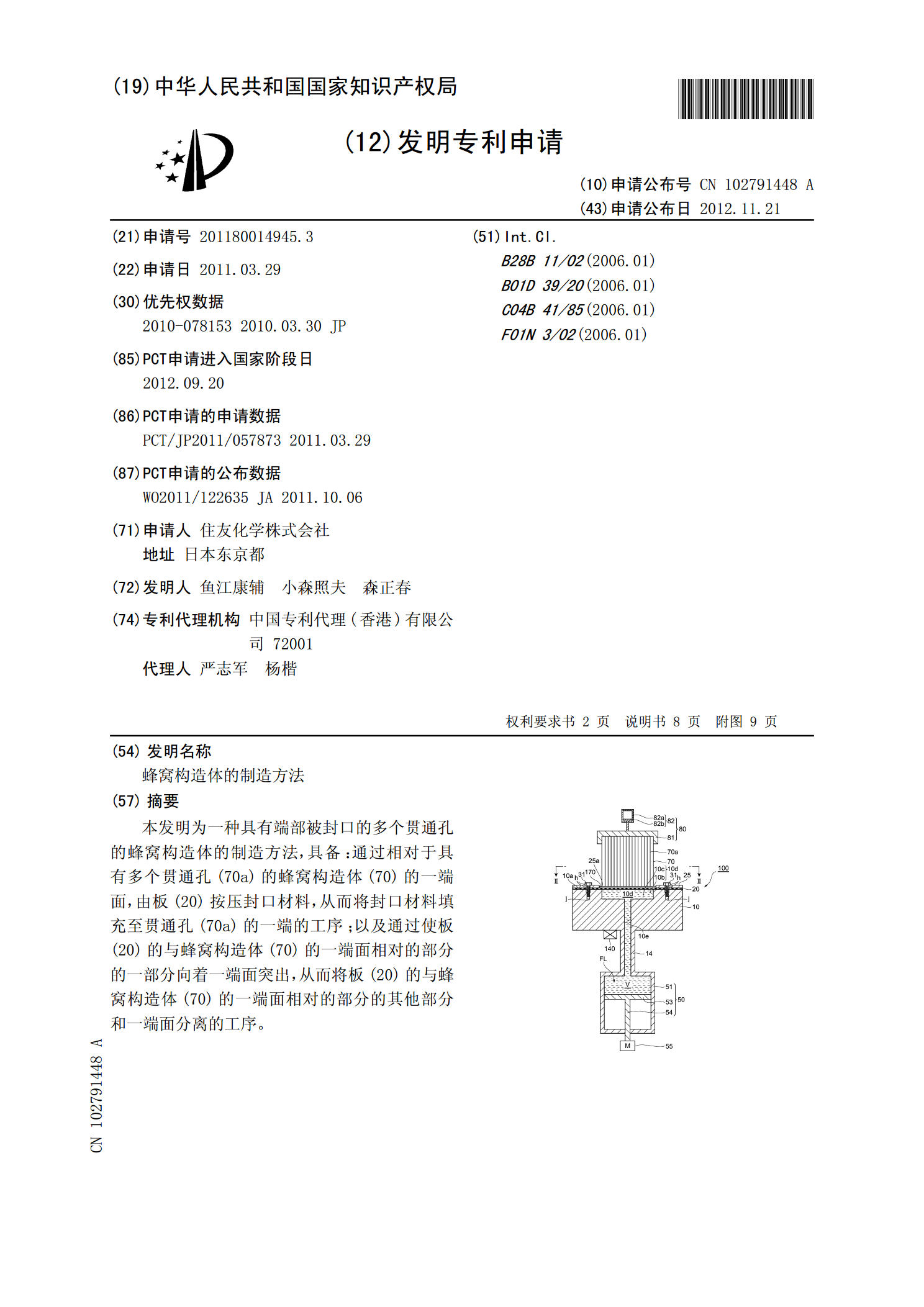
本发明为一种具有端部被封口的多个贯通孔的蜂窝构造体的制造方法,具备:通过相对于具有多个贯通孔(70a)的蜂窝构造体(70)的一端面,由板(20)按压封口材料,从而将封口材料填充至贯通孔(70a)的一端的工序;以及通过使板(20)的与蜂窝构造体(70)的一端面相对的部分的一部分向着一端面突出,从而将板(20)的与蜂窝构造体(70)的一端面相对的部分的其他部分和一端面分离的工序。
蜂窝构造体以及模具.pdf
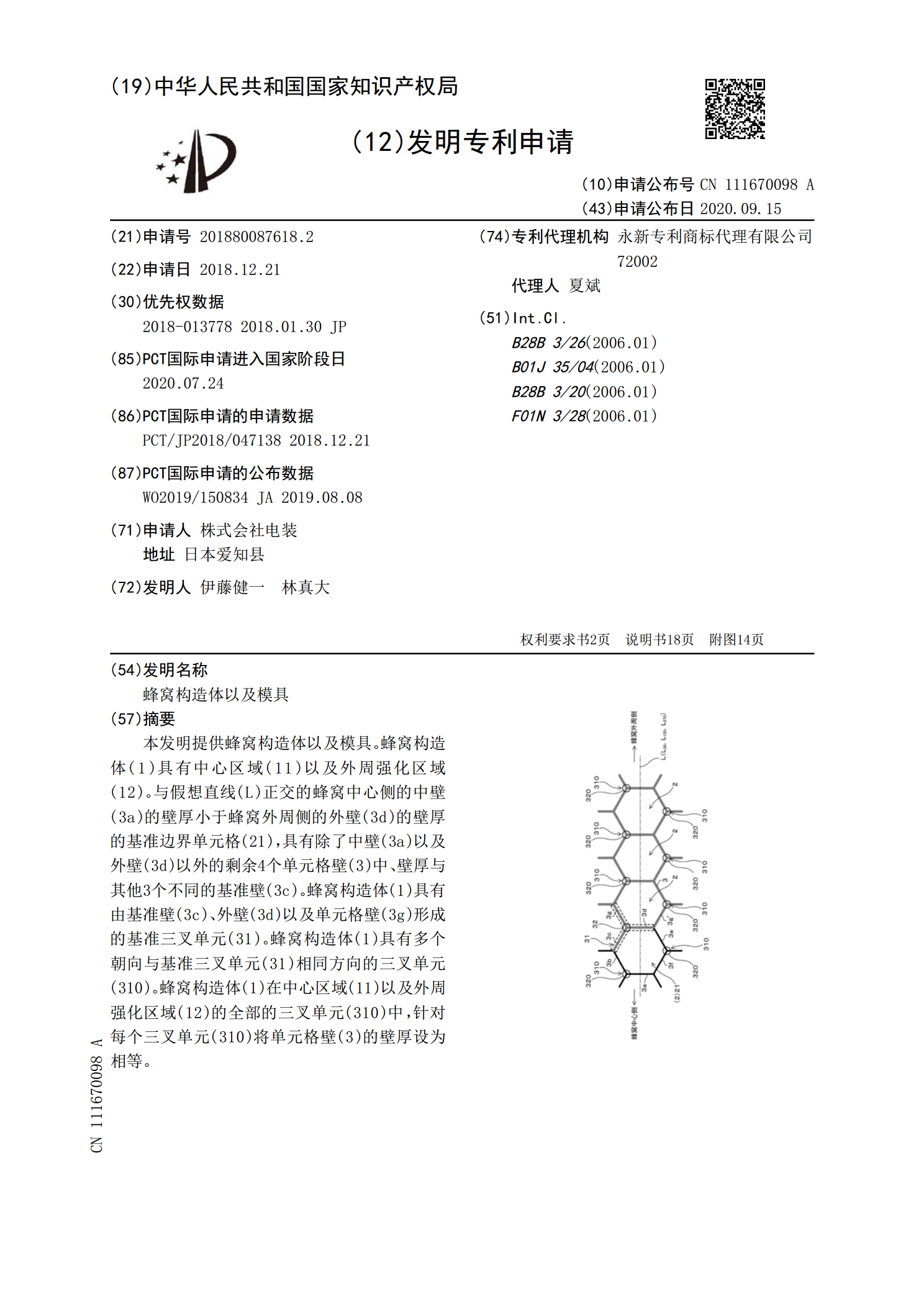
本发明提供蜂窝构造体以及模具。蜂窝构造体(1)具有中心区域(11)以及外周强化区域(12)。与假想直线(L)正交的蜂窝中心侧的中壁(3a)的壁厚小于蜂窝外周侧的外壁(3d)的壁厚的基准边界单元格(21),具有除了中壁(3a)以及外壁(3d)以外的剩余4个单元格壁(3)中、壁厚与其他3个不同的基准壁(3c)。蜂窝构造体(1)具有由基准壁(3c)、外壁(3d)以及单元格壁(3g)形成的基准三叉单元(31)。蜂窝构造体(1)具有多个朝向与基准三叉单元(31)相同方向的三叉单元(310)。蜂窝构造体(1)在中心区