
一种空间垂向分布点位置测量方法及系统.pdf

努力****甲寅


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种空间垂向分布点位置测量方法及系统.pdf
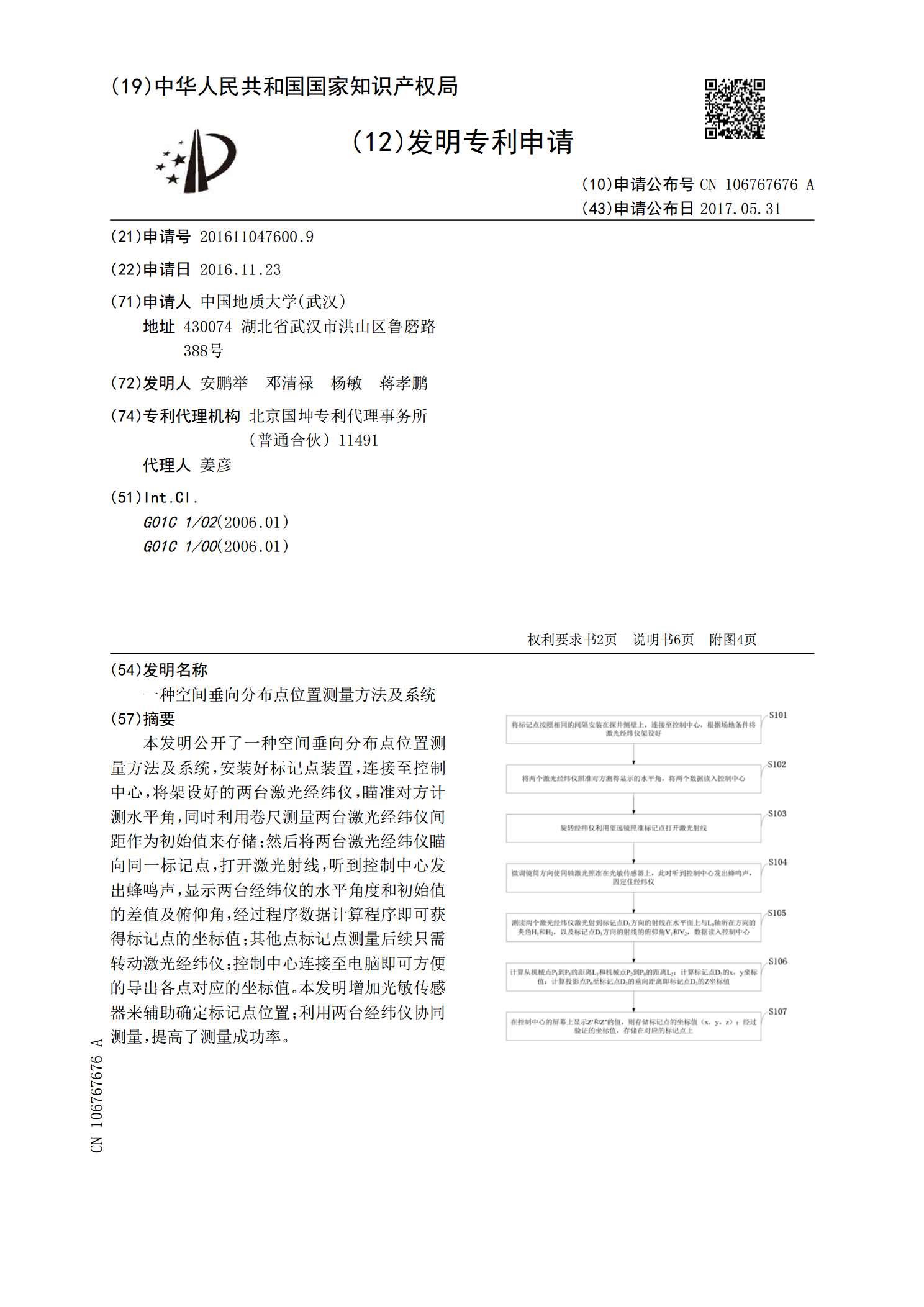
本发明公开了一种空间垂向分布点位置测量方法及系统,安装好标记点装置,连接至控制中心,将架设好的两台激光经纬仪,瞄准对方计测水平角,同时利用卷尺测量两台激光经纬仪间距作为初始值来存储;然后将两台激光经纬仪瞄向同一标记点,打开激光射线,听到控制中心发出蜂鸣声,显示两台经纬仪的水平角度和初始值的差值及俯仰角,经过程序数据计算程序即可获得标记点的坐标值;其他点标记点测量后续只需转动激光经纬仪;控制中心连接至电脑即可方便的导出各点对应的坐标值。本发明增加光敏传感器来辅助确定标记点位置;利用两台经纬仪协同测量,提高了

一种轮胎垂向力的测量方法及装置.docx
一种轮胎垂向力的测量方法及装置标题:一种轮胎垂向力的测量方法及装置摘要:轮胎垂向力(VerticalForce)是指轮胎与地面之间垂直方向的力量,对于轮胎的性能评估和优化具有重要作用。本论文提出了一种新的轮胎垂向力的测量方法及装置,通过利用传感器测量数据和数学模型建立,在实验室环境下进行验证,结果表明该方法及装置可以准确、快速地测量轮胎垂向力。本研究对于轮胎性能研究和轮胎优化具有一定的借鉴意义。关键词:轮胎垂向力、测量方法、测量装置、传感器、数学模型1.引言轮胎垂向力是指轮胎与地面之间垂直方向的作用力,是
一种测量工件台垂向位置的装置.pdf
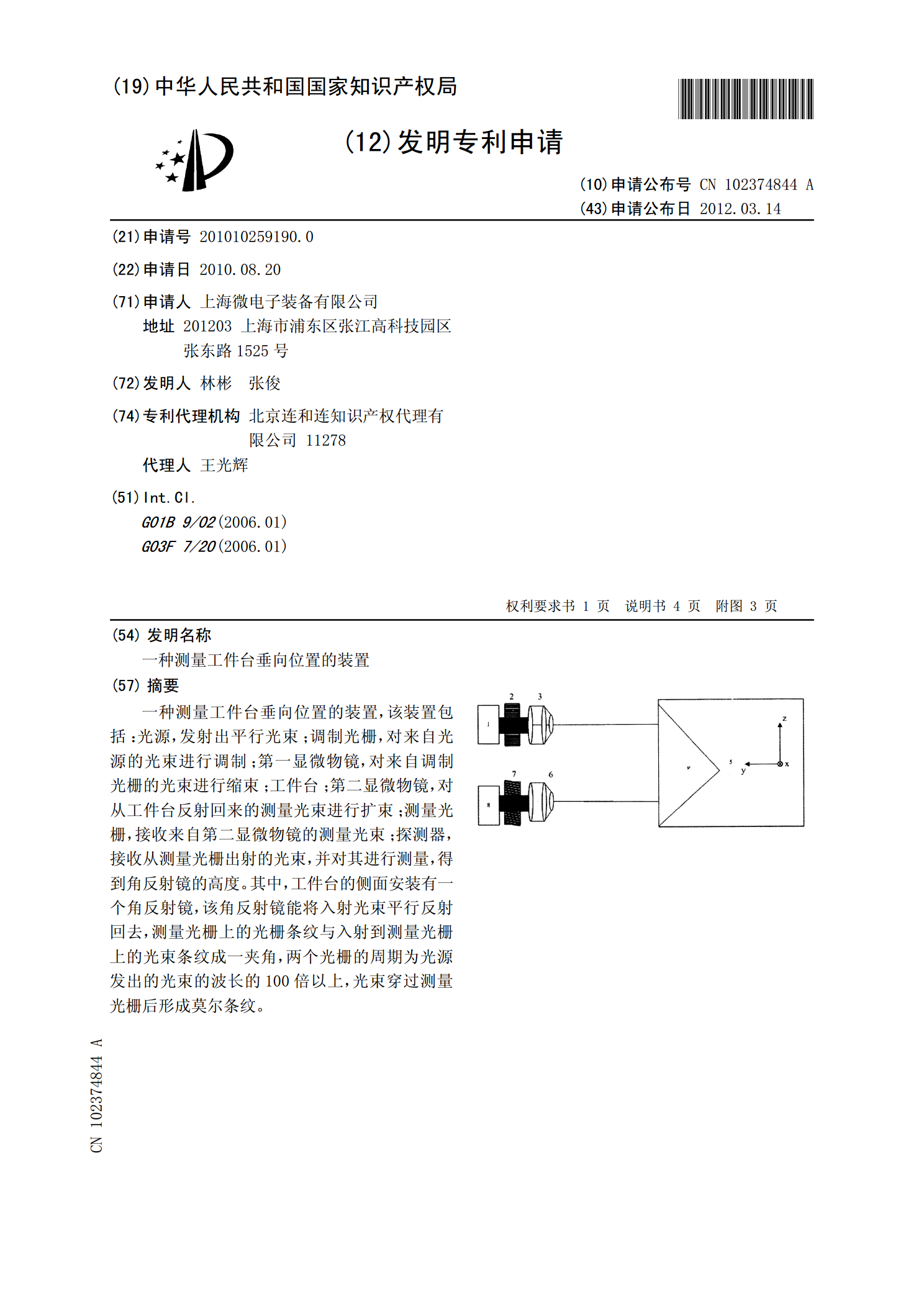
一种测量工件台垂向位置的装置,该装置包括:光源,发射出平行光束;调制光栅,对来自光源的光束进行调制;第一显微物镜,对来自调制光栅的光束进行缩束;工件台;第二显微物镜,对从工件台反射回来的测量光束进行扩束;测量光栅,接收来自第二显微物镜的测量光束;探测器,接收从测量光栅出射的光束,并对其进行测量,得到角反射镜的高度。其中,工件台的侧面安装有一个角反射镜,该角反射镜能将入射光束平行反射回去,测量光栅上的光栅条纹与入射到测量光栅上的光束条纹成一夹角,两个光栅的周期为光源发出的光束的波长的100倍以上,光束穿过测

一种水环境垂向监测系统及一种水环境垂向监测方法.pdf
本发明涉及水环境监测领域,公开了一种水环境垂向监测系统及方法。该水环境垂向监测系统包括供电装置、时间控制装置、升降装置、水环境监测装置以及停止保护装置,其中时间控制装置根据设定的时间开启升降装置并控制水环境监控装置向下或向上移动,所述停止保护装置用于控制水环境监测装置向上移动时的停止位置,以使所述水环境监测装置向上移动时在初始监测位置停止。本发明的技术方案中,通过时间控制装置可以实现水环境垂向监测系统的自动运行,同时通过时间控制装置还可控制水环境监测装置根据设定时间自动升降,并且能使得水环境监测装置稳定地

一种重心位置测量方法及系统.pdf
本发明属于超精密主动减振相关技术领域,其公开了一种重心位置的测量方法。所述方法采用重心测量系统实现,该重心测量系统包括控制器和两个以上的主动减振器,每个所述主动减振器配合有执行器及传感器,所述主动减振器用于支撑负载,并在各主动减振器处形成支撑点,该测量方法包括:S1启动重心测量系统,控制器调整各执行器的出力幅值,使得负载只存在重力方向的响应;S2根据各执行器出力幅值及相邻支撑点间的距离计算获得所述负载的重心位置。本发明还公开了一种对应的测量系统。本发明的测量方法,实现了精密主动减振器负载重心的快速识别,并