
基于人工蜂群算法的无人艇航向控制模型的参数辨识方法.pdf

一条****淑淑

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于人工蜂群算法的无人艇航向控制模型的参数辨识方法.pdf
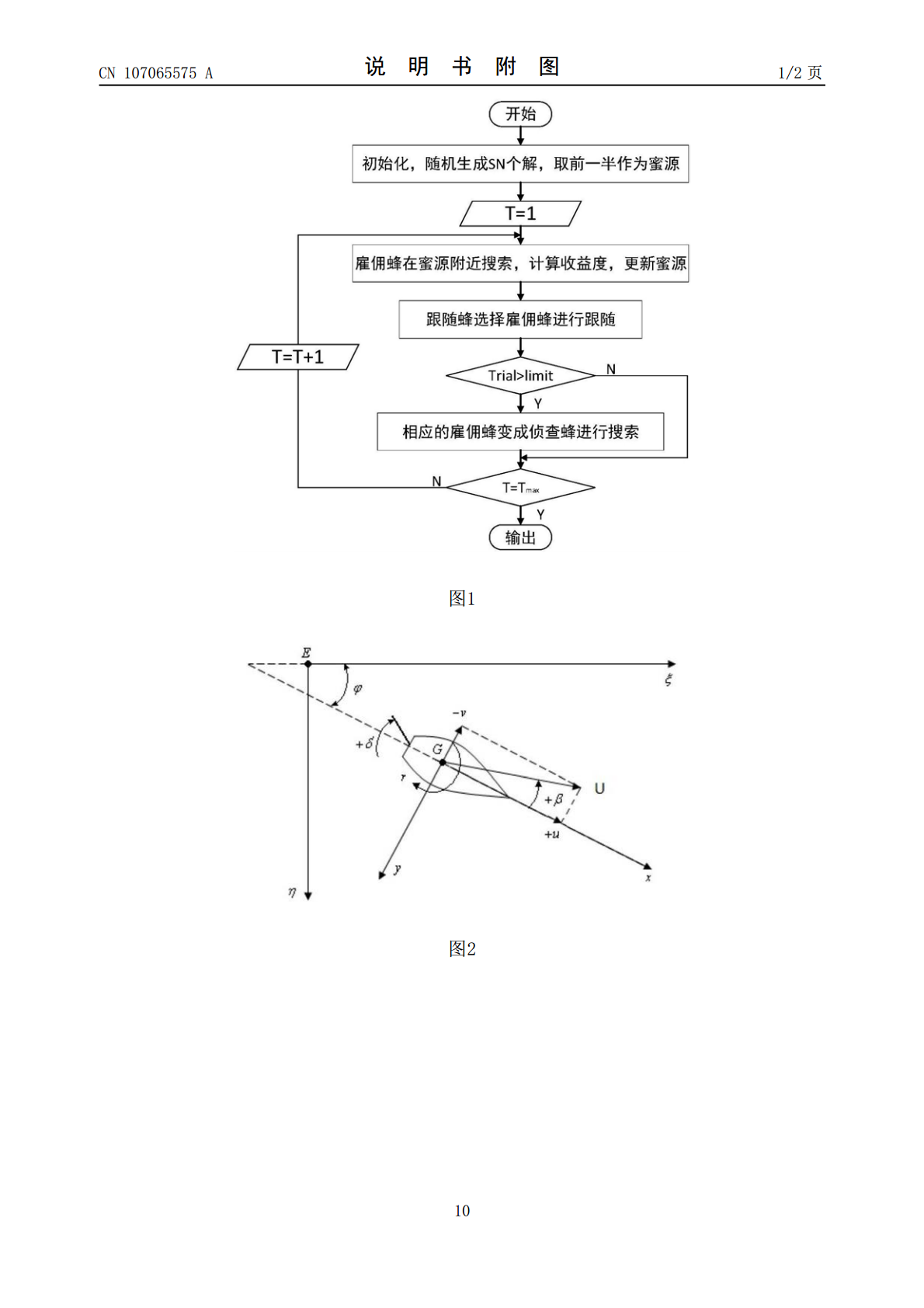
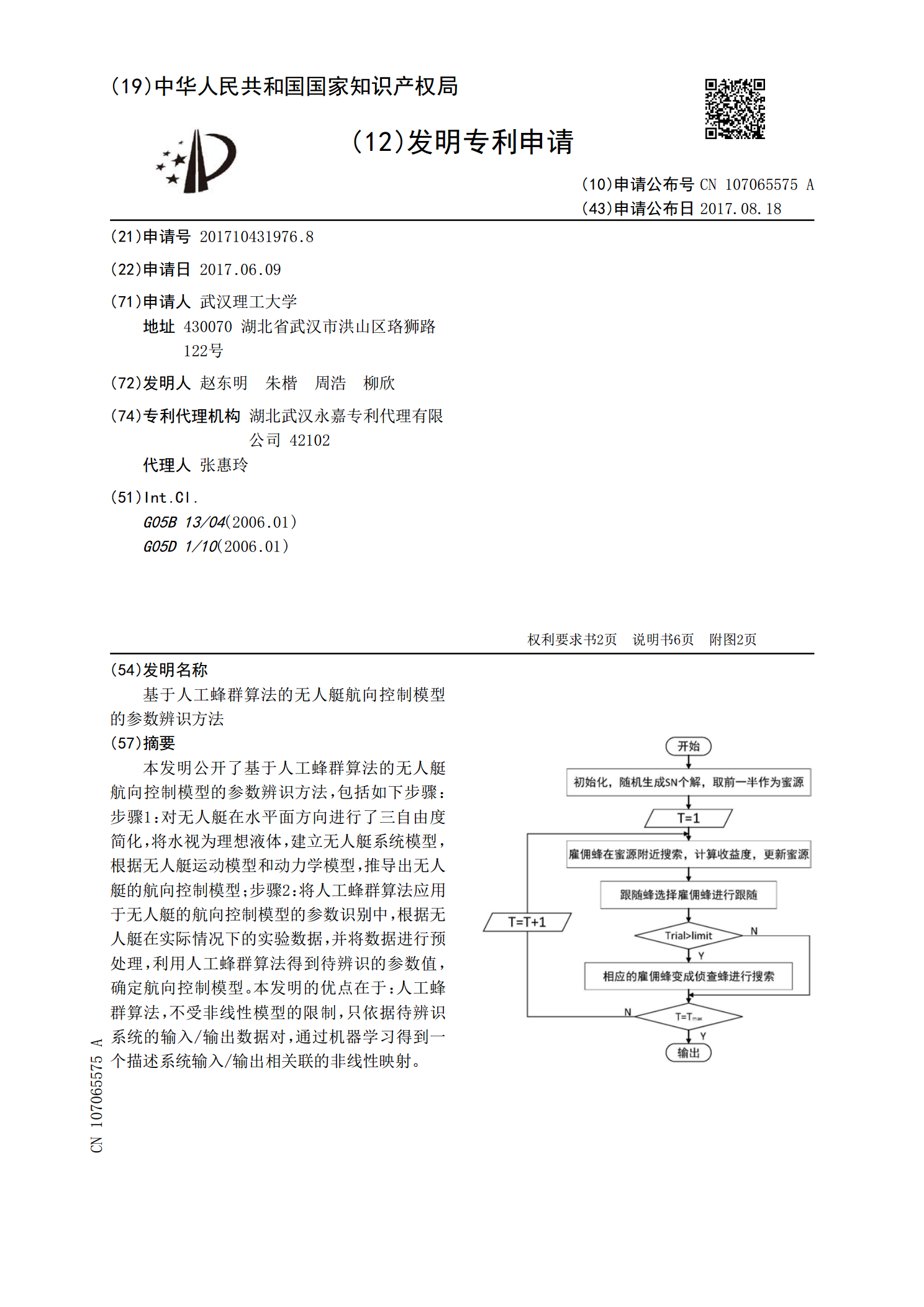
本发明公开了基于人工蜂群算法的无人艇航向控制模型的参数辨识方法,包括如下步骤:步骤1:对无人艇在水平面方向进行了三自由度简化,将水视为理想液体,建立无人艇系统模型,根据无人艇运动模型和动力学模型,推导出无人艇的航向控制模型;步骤2:将人工蜂群算法应用于无人艇的航向控制模型的参数识别中,根据无人艇在实际情况下的实验数据,并将数据进行预处理,利用人工蜂群算法得到待辨识的参数值,确定航向控制模型。本发明的优点在于:人工蜂群算法,不受非线性模型的限制,只依据待辨识系统的输入/输出数据对,通过机器学习得到一个描述系
一种基于人工蜂群算法的锂离子电池模型参数辨识方法.pdf
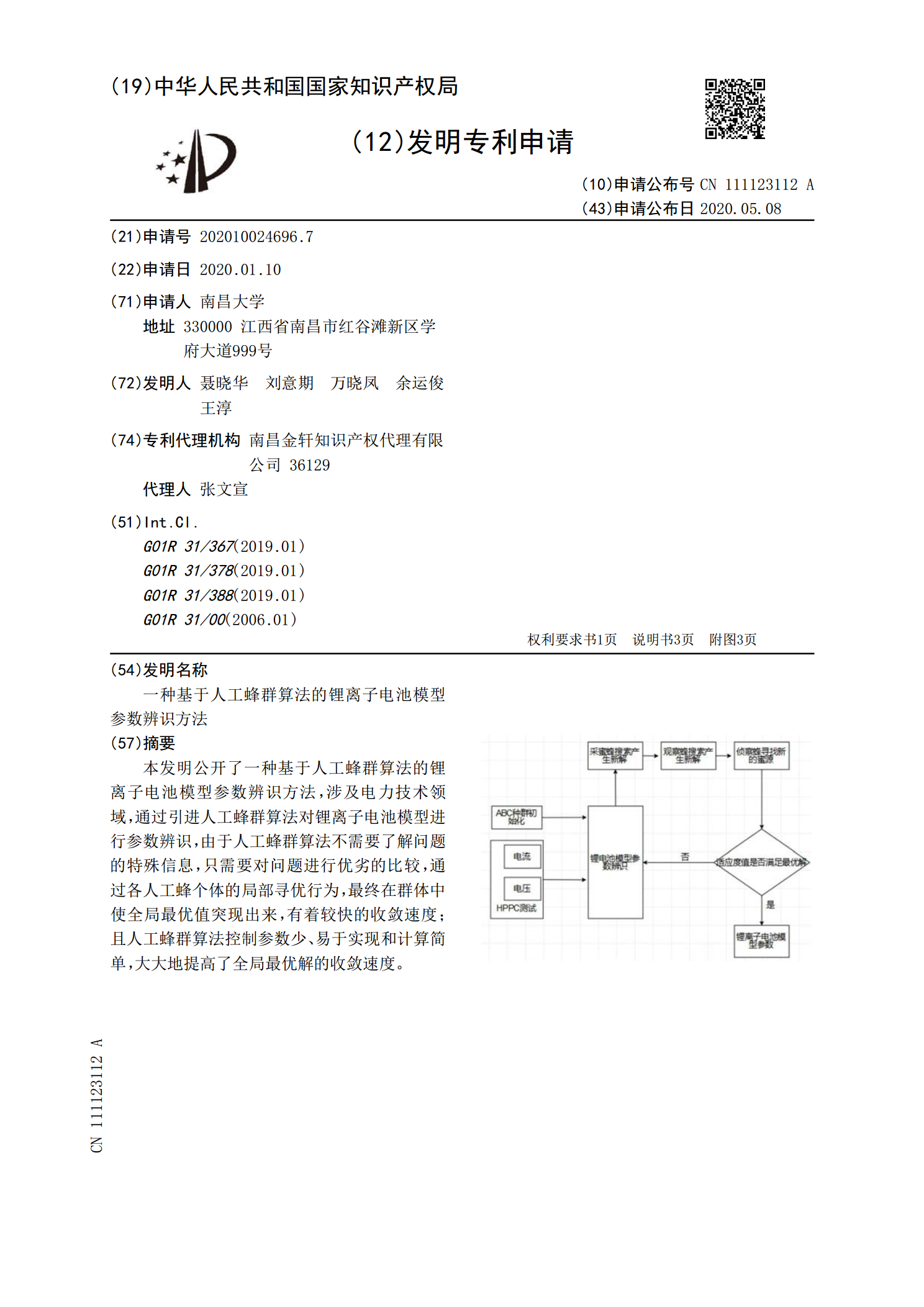
本发明公开了一种基于人工蜂群算法的锂离子电池模型参数辨识方法,涉及电力技术领域,通过引进人工蜂群算法对锂离子电池模型进行参数辨识,由于人工蜂群算法不需要了解问题的特殊信息,只需要对问题进行优劣的比较,通过各人工蜂个体的局部寻优行为,最终在群体中使全局最优值突现出来,有着较快的收敛速度;且人工蜂群算法控制参数少、易于实现和计算简单,大大地提高了全局最优解的收敛速度。
基于并行蜂群算法的水文模型参数优化方法及装置.pdf
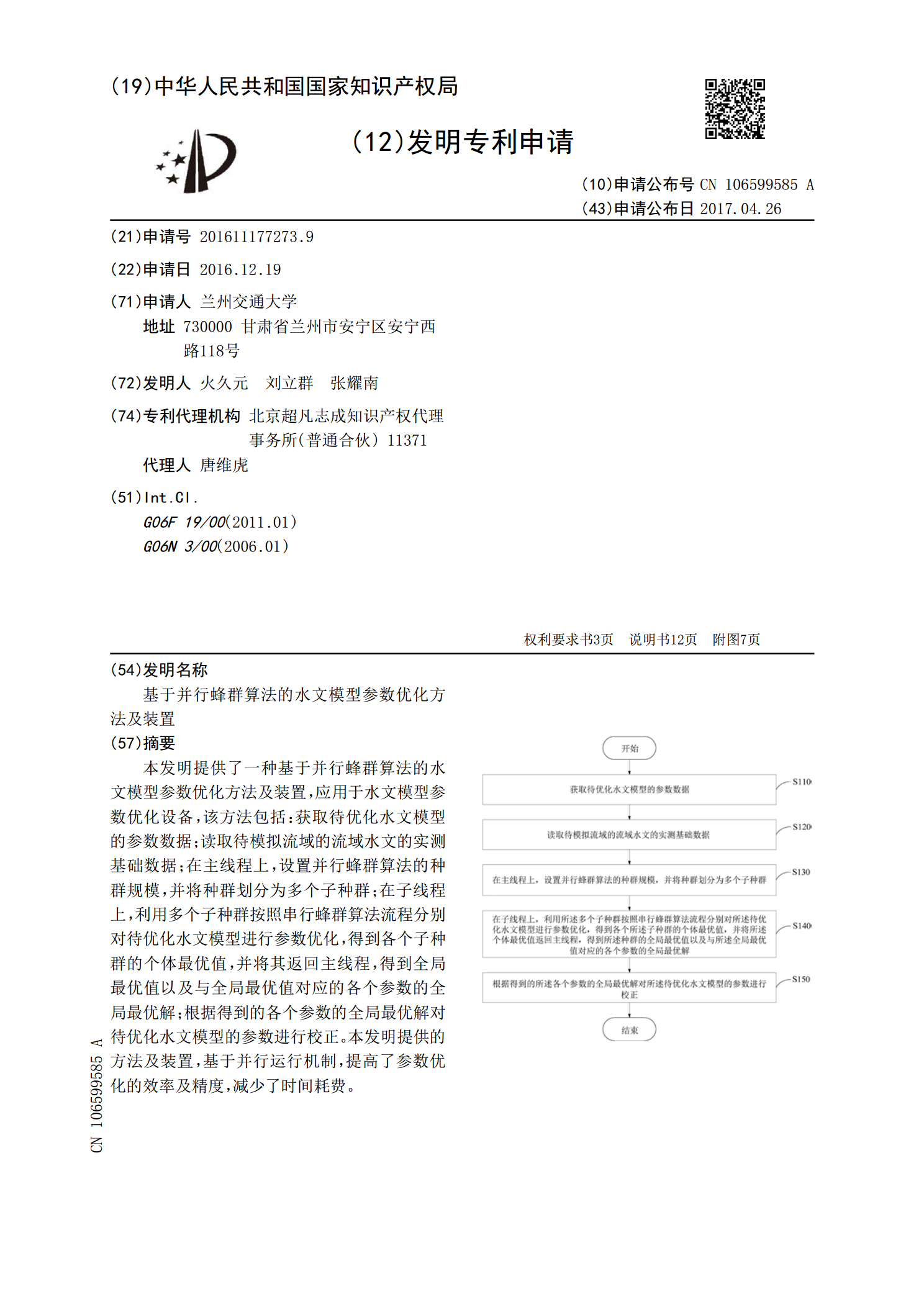
本发明提供了一种基于并行蜂群算法的水文模型参数优化方法及装置,应用于水文模型参数优化设备,该方法包括:获取待优化水文模型的参数数据;读取待模拟流域的流域水文的实测基础数据;在主线程上,设置并行蜂群算法的种群规模,并将种群划分为多个子种群;在子线程上,利用多个子种群按照串行蜂群算法流程分别对待优化水文模型进行参数优化,得到各个子种群的个体最优值,并将其返回主线程,得到全局最优值以及与全局最优值对应的各个参数的全局最优解;根据得到的各个参数的全局最优解对待优化水文模型的参数进行校正。本发明提供的方法及装置,基
一种基于人工蜂群的空调能耗模型参数辨识方法.pdf
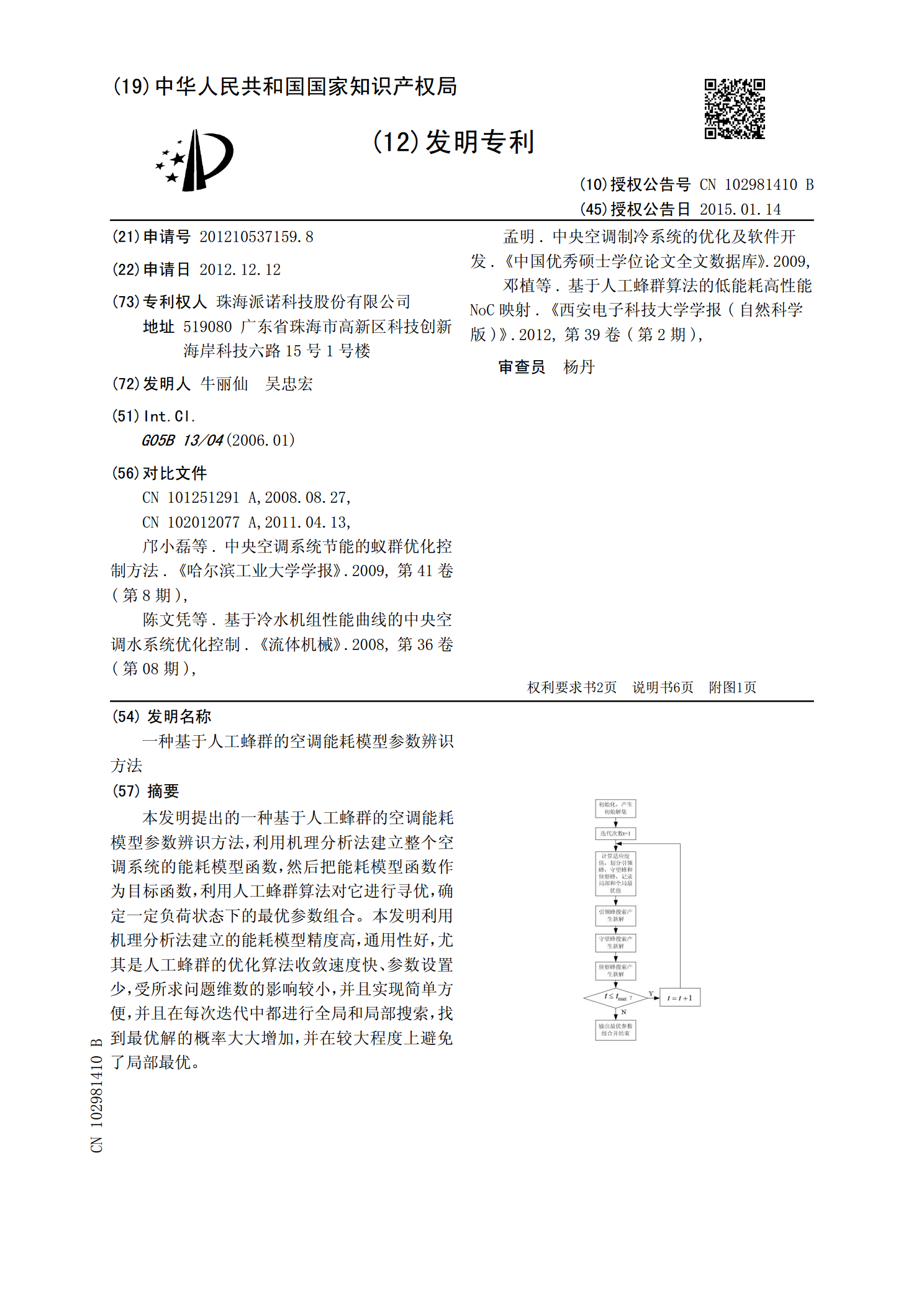
本发明提出的一种基于人工蜂群的空调能耗模型参数辨识方法,利用机理分析法建立整个空调系统的能耗模型函数,然后把能耗模型函数作为目标函数,利用人工蜂群算法对它进行寻优,确定一定负荷状态下的最优参数组合。本发明利用机理分析法建立的能耗模型精度高,通用性好,尤其是人工蜂群的优化算法收敛速度快、参数设置少,受所求问题维数的影响较小,并且实现简单方便,并且在每次迭代中都进行全局和局部搜索,找到最优解的概率大大增加,并在较大程度上避免了局部最优。

水面无人艇航向控制装置及控制方法.pdf
水面无人艇航向控制装置及控制方法。水面无人艇的航向控制通常是利用专门的舵装置或者喷水转向装置来实现的,机动性能不强,舵装置或者喷水转向装置难以有效实现无人艇在较短时间和较小范围内实现大幅度转向,舵向精准性差。本发明组成包括:甲板(4),甲板上部固定有主固定盘(3)和副固定盘(7),主固定盘下部设置有主转盘(5),主固定盘下表面具有一圈360个主红外接收开关(1),主转盘上表面固定有主红外发射开关(6),副固定盘下部设置副转盘(10),副固定盘下表面具有一圈360个副红外接收开关(8),副转盘上表面固定有副