
一种全自动智能炒菜机器人.pdf

是你****松呀

1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种全自动智能炒菜机器人.pdf
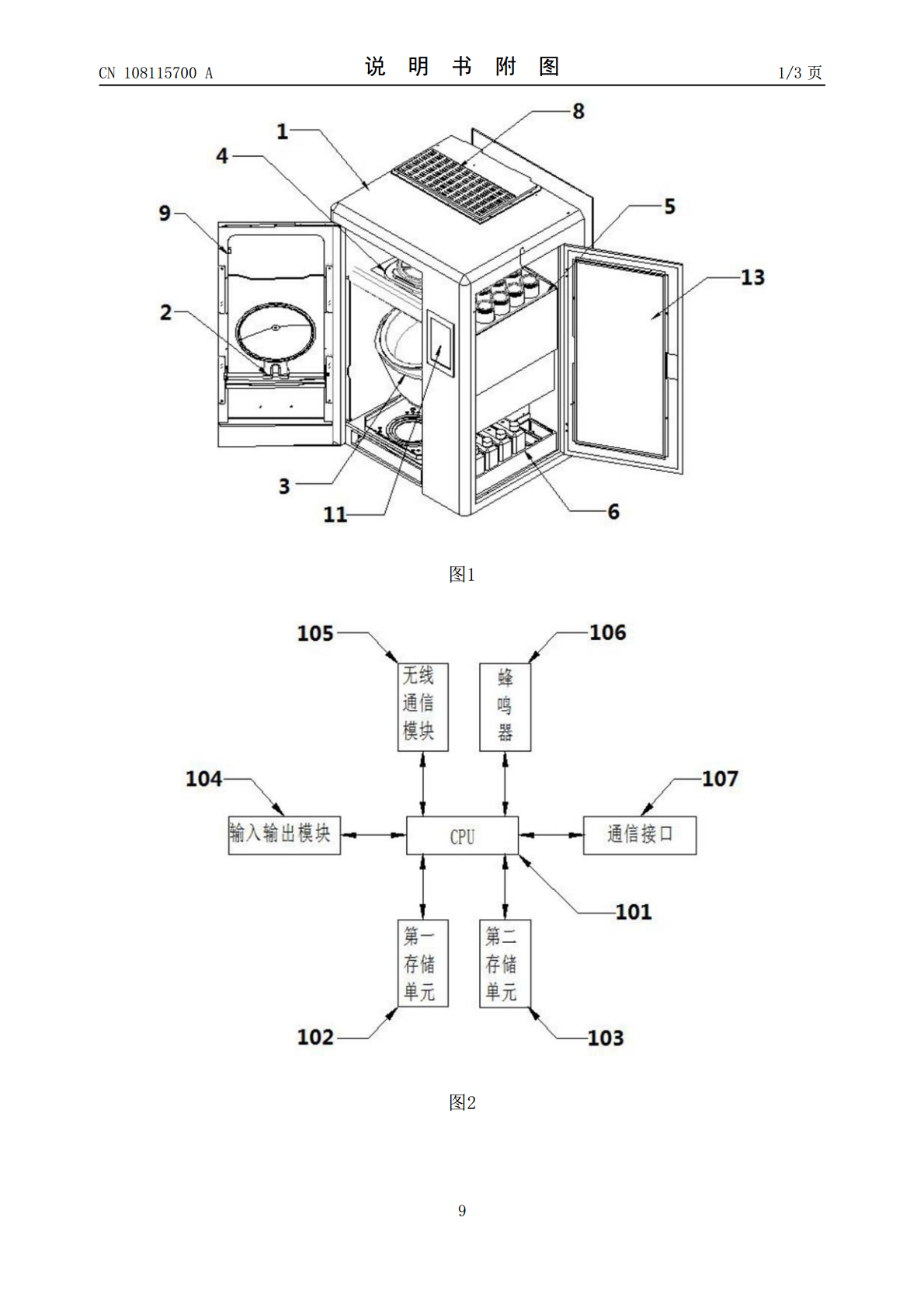
本发明公开了一种全自动智能炒菜机器人,包括柜体、中央控制器和分别与所述中央控制器电连接的锅盖翻转机构、锅体加热翻转机构、倒菜机构、固体加料系统、液体加料系统、清洗系统以及油烟处理系统,所述中央控制器具体包括中央处理器、用于存储控制代码的第一存储单元、用于存储菜单的第二存储单元、输入输出模块、无线通信模块、蜂鸣器以及与上述各系统连接的通信接口。本发明提供的全自动智能炒菜机器人,通过内部设置的各机构和系统之间的配合,自动完成炒菜过程,并且在炒菜过程不需要任何人工干预,就能够模拟厨师炒菜的过程,完成从锅内预热,
一种智能炒菜机器人.pdf
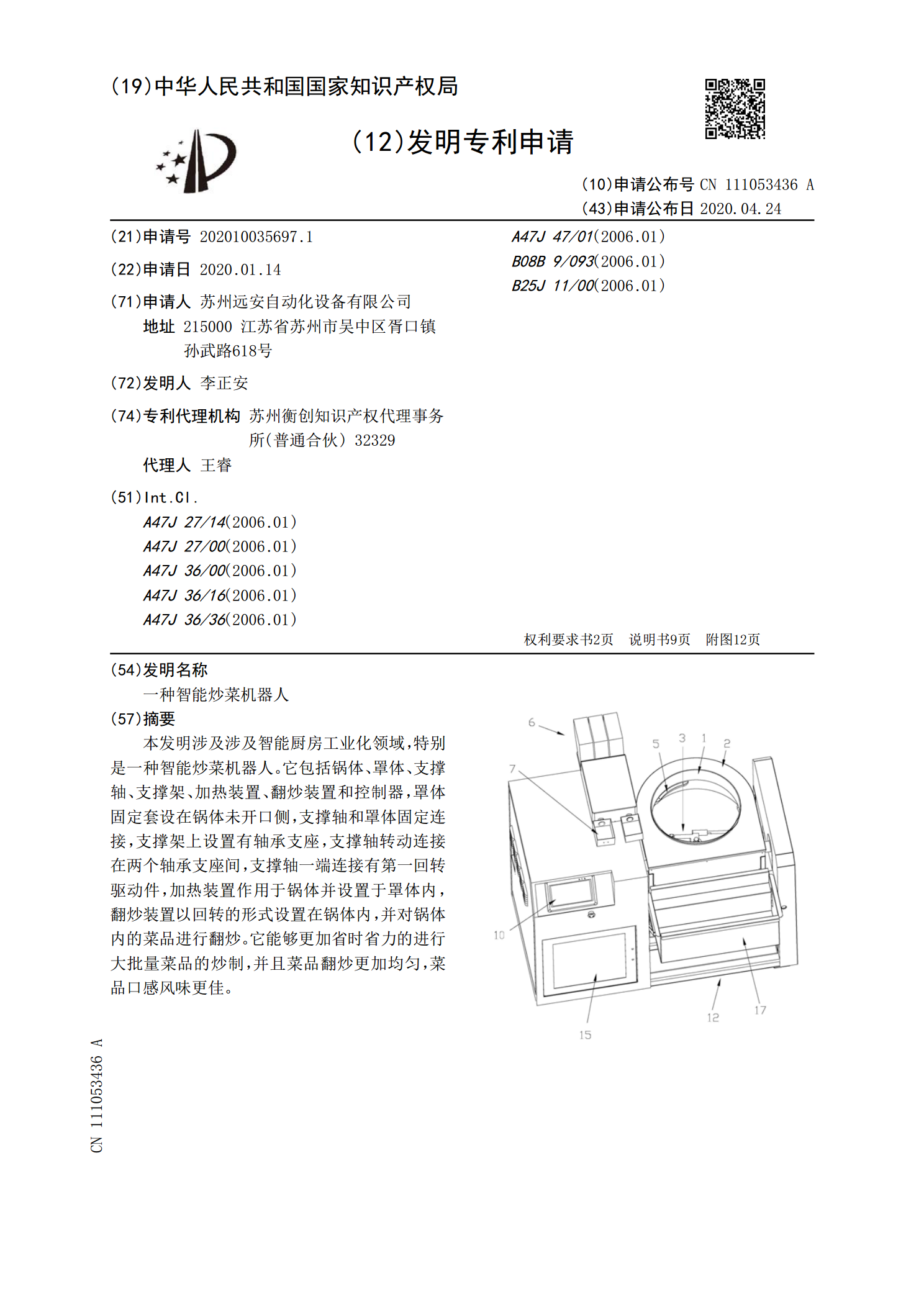
本发明涉及涉及智能厨房工业化领域,特别是一种智能炒菜机器人。它包括锅体、罩体、支撑轴、支撑架、加热装置、翻炒装置和控制器,罩体固定套设在锅体未开口侧,支撑轴和罩体固定连接,支撑架上设置有轴承支座,支撑轴转动连接在两个轴承支座间,支撑轴一端连接有第一回转驱动件,加热装置作用于锅体并设置于罩体内,翻炒装置以回转的形式设置在锅体内,并对锅体内的菜品进行翻炒。它能够更加省时省力的进行大批量菜品的炒制,并且菜品翻炒更加均匀,菜品口感风味更佳。

一种智能炒菜机器人.pdf
本发明涉及一种智能炒菜机器人,属于食品加工智能机械技术领域。包括锅体、灶台、调料食材添加装置、控制装置以及出菜装置,调料食材添加装置设置在锅体右侧,包括滑轨、丝杠以及液体及固体调料食材供应装置;控制装置包括燃气阀门、温度传感器、触摸屏,温度传感器的温度数据传送给触摸屏;出菜装置包括可转动支架、从动轮、主动轮以及转动电机;左锅口设置在可转动支架上,二者之间设置有可转动的轴承组,用于调节出菜角度;右锅口直接设置在后支座上,后支座两侧设置有从动轮,底部设置有主动轮,主动轮通过传动装置与转动电机相连。本发明可有效

一种智能燃气炒菜机器人.pdf
本发明公开了一种智能燃气炒菜机器人,包括机器壳体、锅盖、流量显示器和驱动转轮,所述机器壳体顶端设置有油烟过滤室,所述机器壳体表面设置有设定面板,所述燃气桶一侧设置有流量显示器,所述管道口下端设置有污水室,所述锅芯一侧设置有掂锅运动机构。有益效果在于:通过自动调整装置能够根据菜量的多少自动调节油烟过滤室的快慢程度,实现自动化,通过燃气桶与流量显示器连接,通过流量显示器能够显示燃气桶的燃气用量,在不耽误使用的情况下及时充值燃气,而设定面板存储一定的数据资料,能够根据来自地方不同的操作人员进行方言设定配合扩音口

一种全自动滚筒式智能炒菜机.pdf
本说明书一个或多个实施例提供一种全自动滚筒式智能炒菜机,通过设置底座、支撑架、转轴、支撑筒、滚筒锅体、盛料盘和加热部,对滚筒锅体内部的食材进行加热翻炒,并在翻炒结束后,通过支撑筒的旋转将菜肴倒出至盛料盘中,本炒菜机还通过设置加料机构和储存机构,可先将食材分类储藏在食材存放区中,菜谱管理机构根据用户的选择,生成需要的食材清单和对应的重量,识别机构再对食材存放区中的标签进行识别,从而根据需求寻找到需要的食材,之后根据需求的重量,将对应的食材输送到称重机构上进行称重,称得所需重量后,继续输送到滚筒锅体内部,从而