
一种异形工件检测装置.pdf

努力****绮亦

1/8

2/8
3/8
4/8

5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种异形工件检测装置.pdf
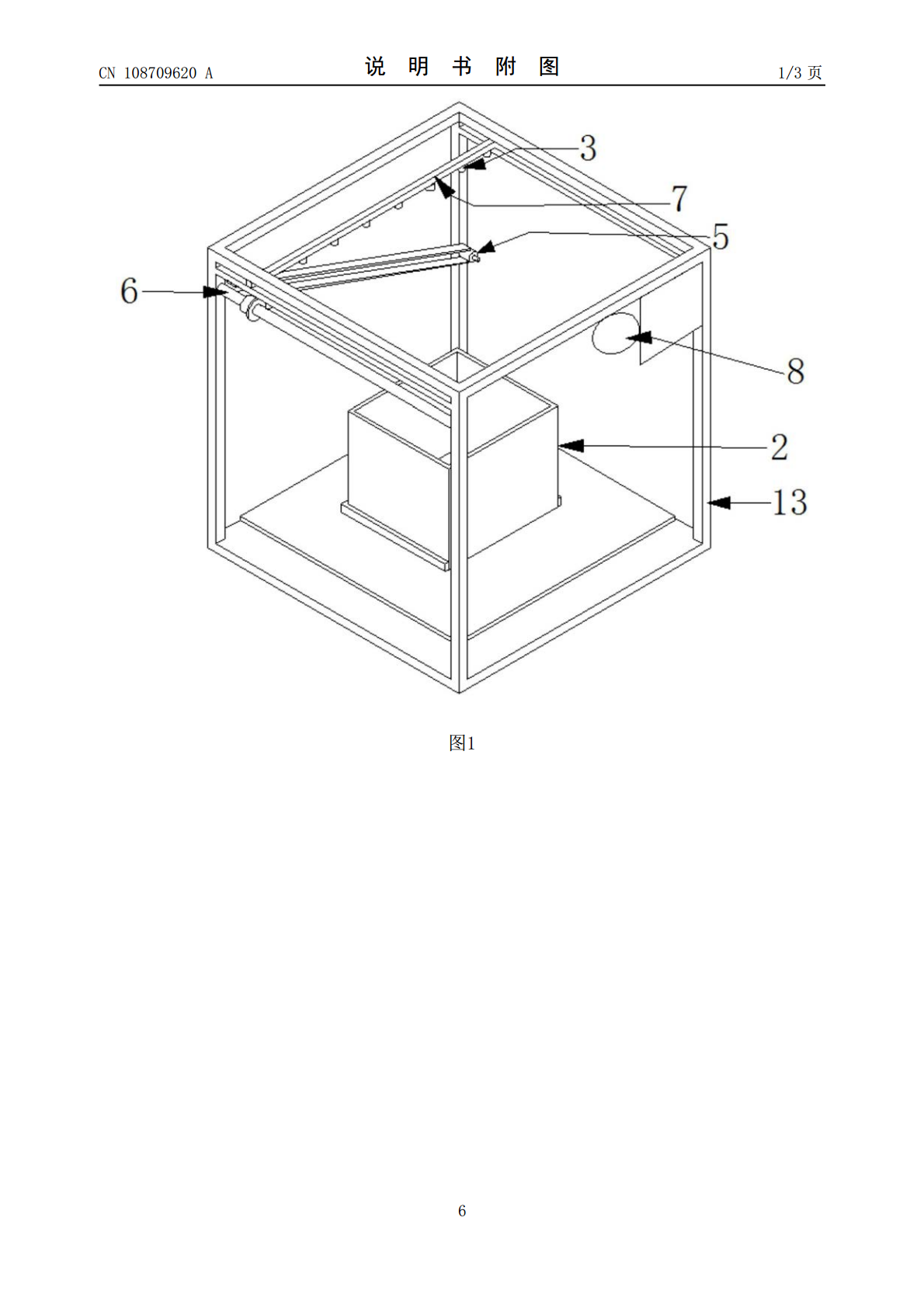
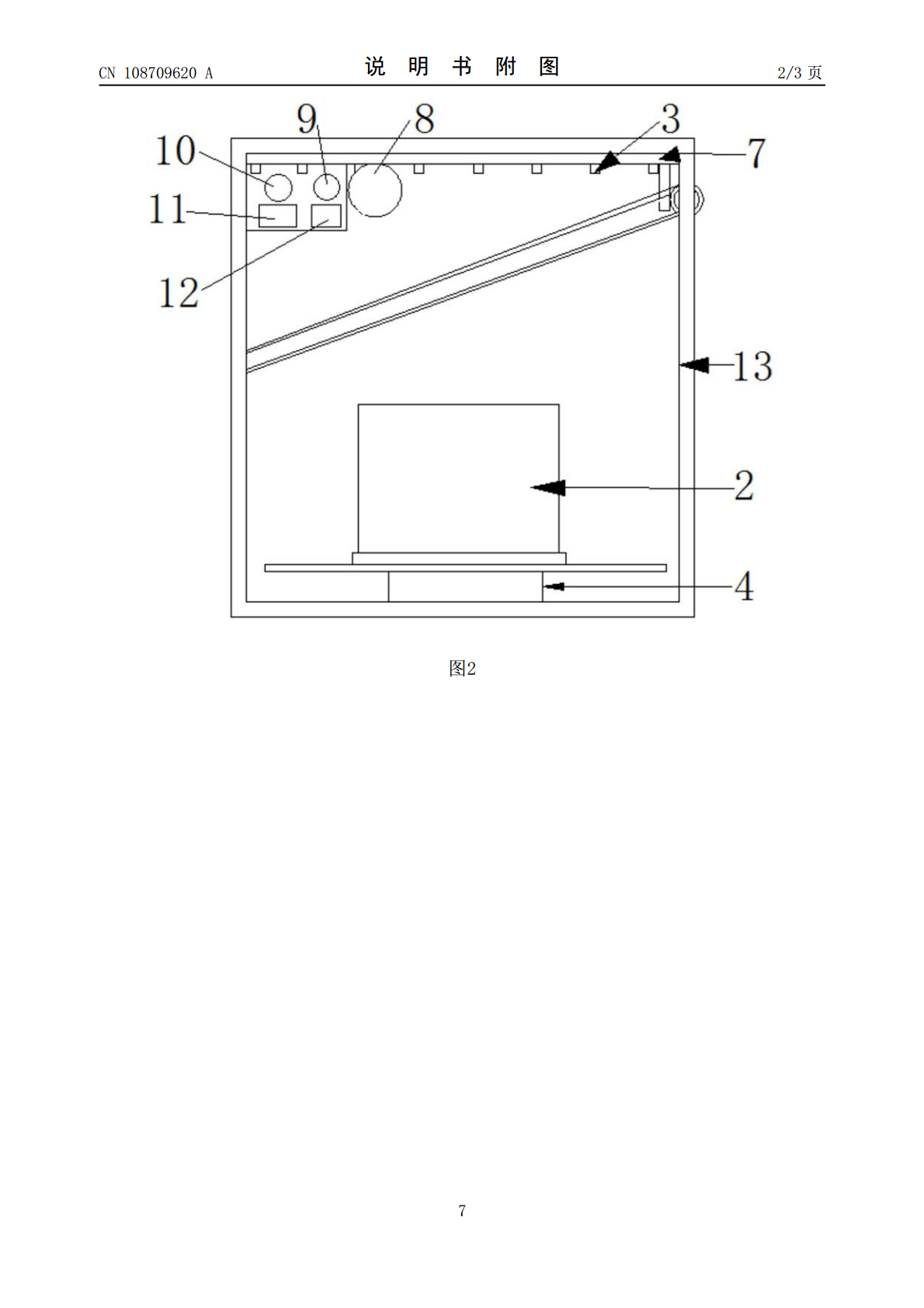
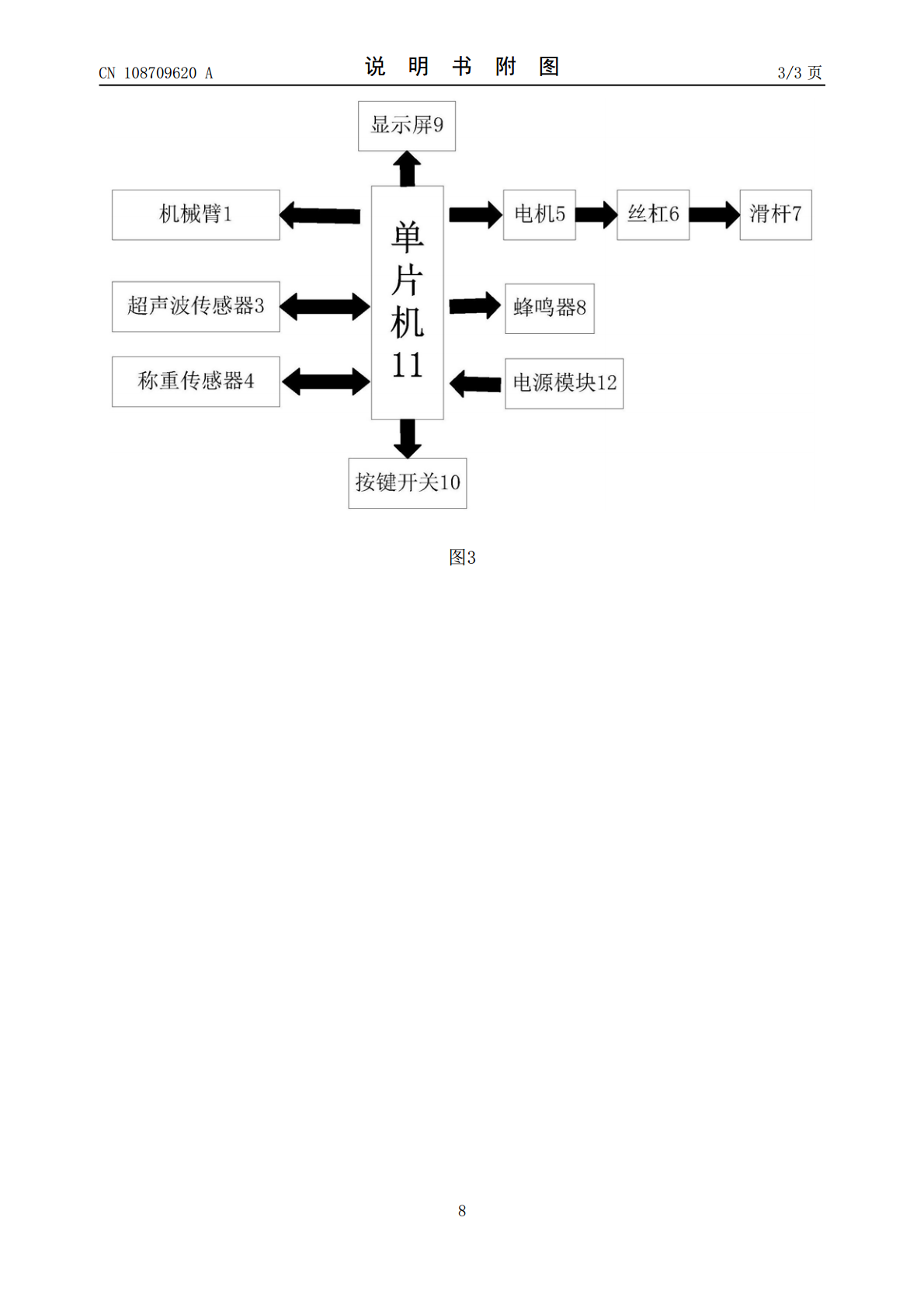
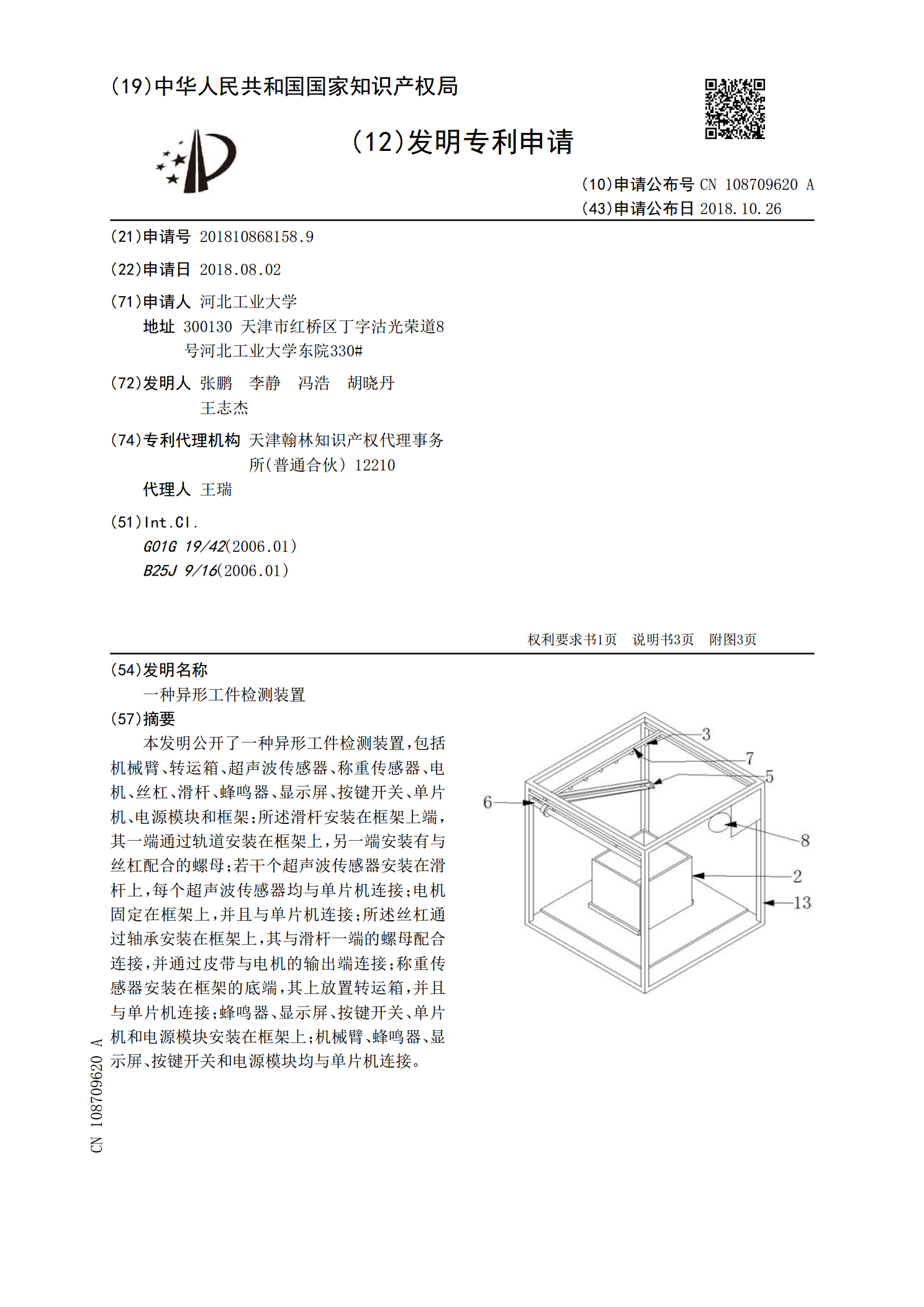
本发明公开了一种异形工件检测装置,包括机械臂、转运箱、超声波传感器、称重传感器、电机、丝杠、滑杆、蜂鸣器、显示屏、按键开关、单片机、电源模块和框架;所述滑杆安装在框架上端,其一端通过轨道安装在框架上,另一端安装有与丝杠配合的螺母;若干个超声波传感器安装在滑杆上,每个超声波传感器均与单片机连接;电机固定在框架上,并且与单片机连接;所述丝杠通过轴承安装在框架上,其与滑杆一端的螺母配合连接,并通过皮带与电机的输出端连接;称重传感器安装在框架的底端,其上放置转运箱,并且与单片机连接;蜂鸣器、显示屏、按键开关、单片
一种异形工件测量的视觉精密检测装置.pdf
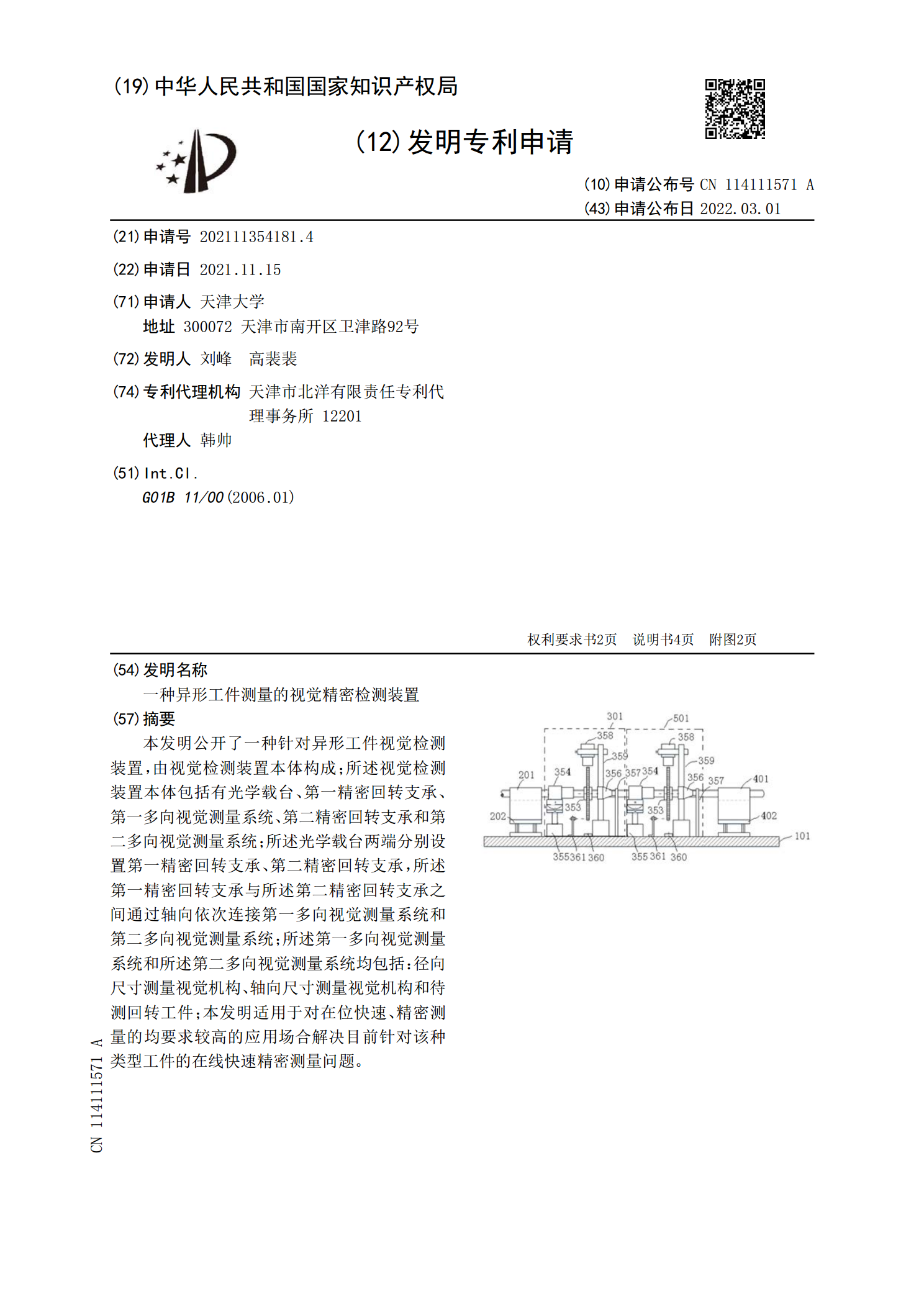
本发明公开了一种针对异形工件视觉检测装置,由视觉检测装置本体构成;所述视觉检测装置本体包括有光学载台、第一精密回转支承、第一多向视觉测量系统、第二精密回转支承和第二多向视觉测量系统;所述光学载台两端分别设置第一精密回转支承、第二精密回转支承,所述第一精密回转支承与所述第二精密回转支承之间通过轴向依次连接第一多向视觉测量系统和第二多向视觉测量系统;所述第一多向视觉测量系统和所述第二多向视觉测量系统均包括:径向尺寸测量视觉机构、轴向尺寸测量视觉机构和待测回转工件;本发明适用于对在位快速、精密测量的均要求较高的
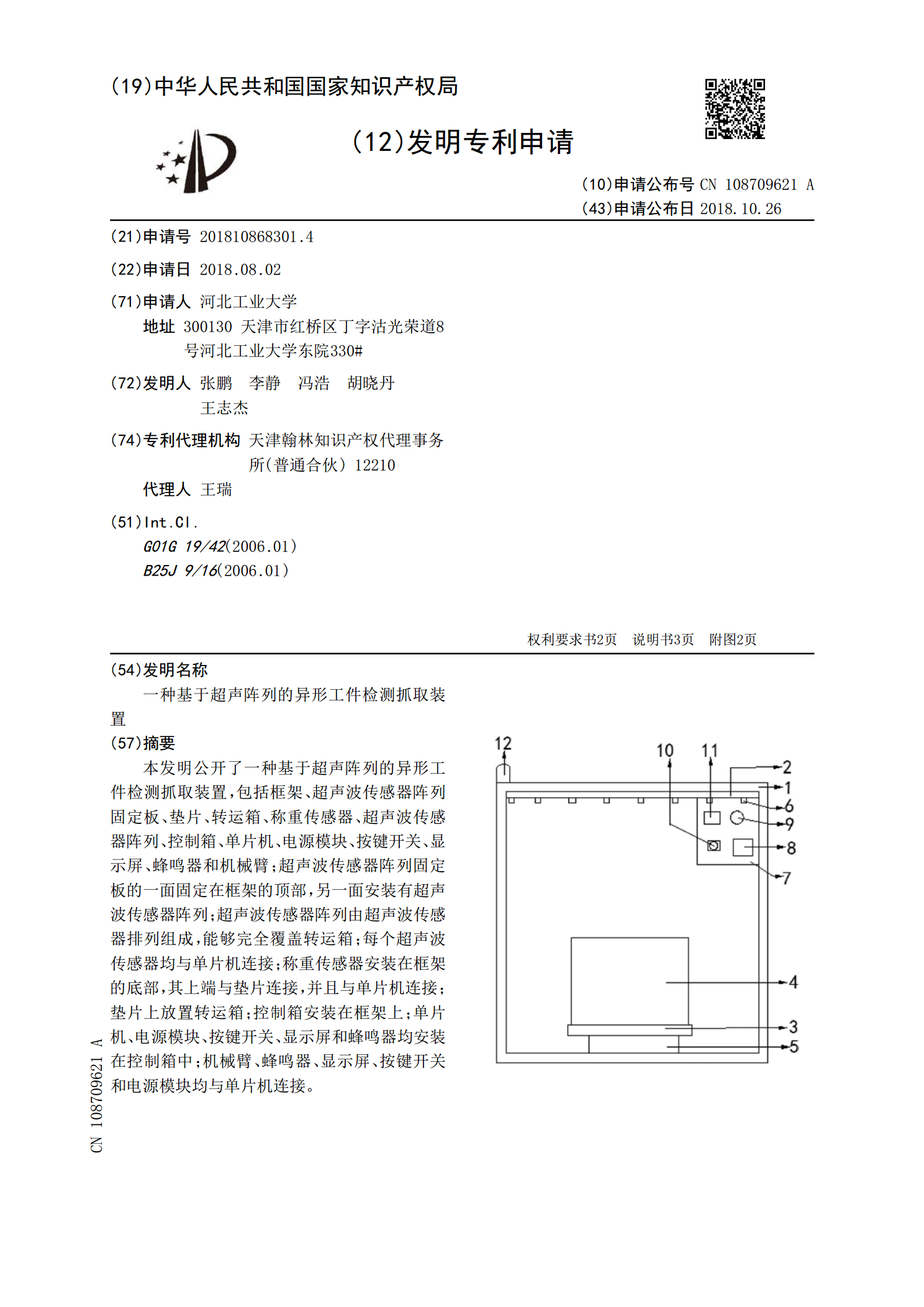
一种基于超声阵列的异形工件检测抓取装置.pdf
本发明公开了一种基于超声阵列的异形工件检测抓取装置,包括框架、超声波传感器阵列固定板、垫片、转运箱、称重传感器、超声波传感器阵列、控制箱、单片机、电源模块、按键开关、显示屏、蜂鸣器和机械臂;超声波传感器阵列固定板的一面固定在框架的顶部,另一面安装有超声波传感器阵列;超声波传感器阵列由超声波传感器排列组成,能够完全覆盖转运箱;每个超声波传感器均与单片机连接;称重传感器安装在框架的底部,其上端与垫片连接,并且与单片机连接;垫片上放置转运箱;控制箱安装在框架上;单片机、电源模块、按键开关、显示屏和蜂鸣器均安装在
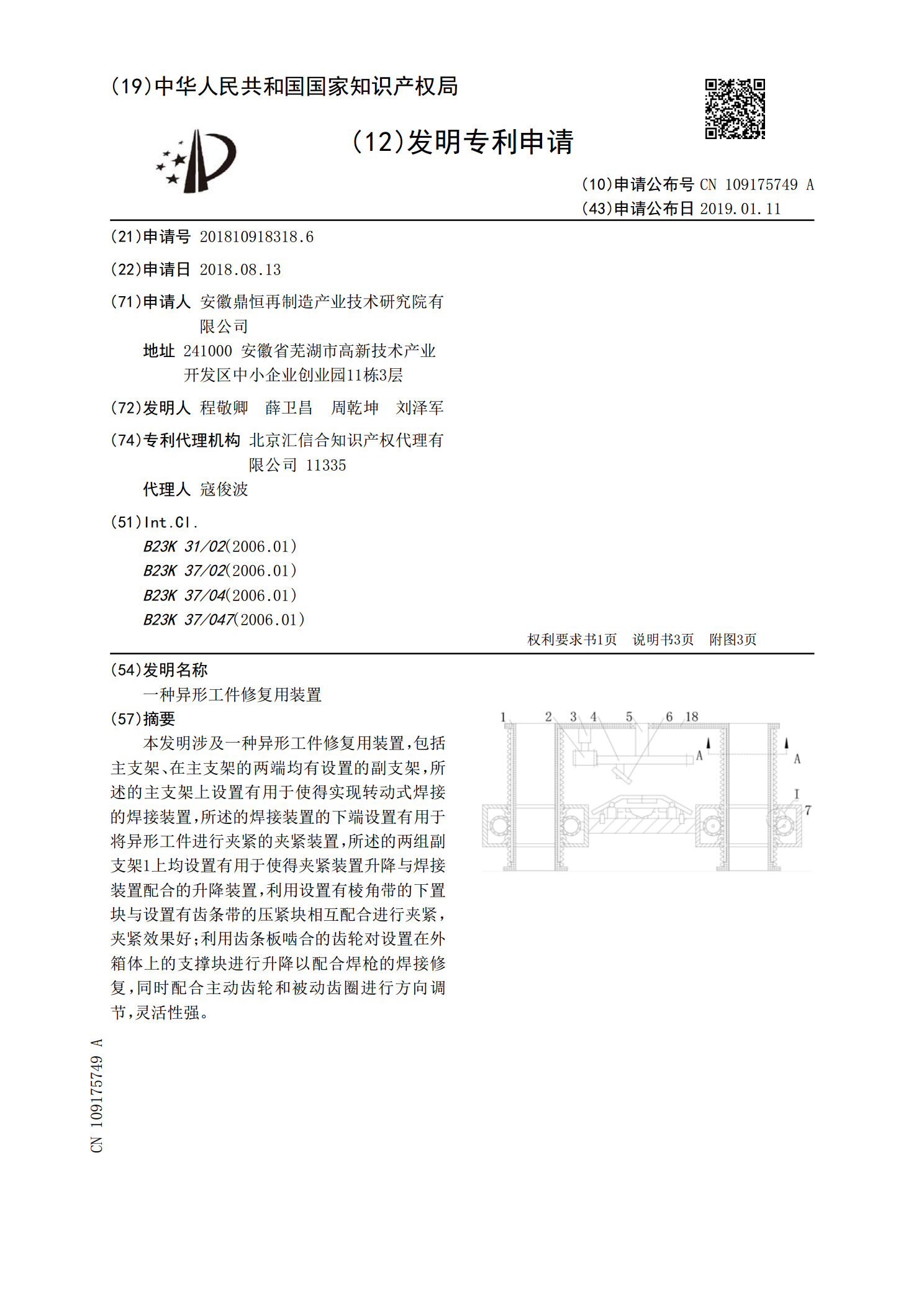
一种异形工件修复用装置.pdf
本发明涉及一种异形工件修复用装置,包括主支架、在主支架的两端均有设置的副支架,所述的主支架上设置有用于使得实现转动式焊接的焊接装置,所述的焊接装置的下端设置有用于将异形工件进行夹紧的夹紧装置,所述的两组副支架1上均设置有用于使得夹紧装置升降与焊接装置配合的升降装置,利用设置有棱角带的下置块与设置有齿条带的压紧块相互配合进行夹紧,夹紧效果好;利用齿条板啮合的齿轮对设置在外箱体上的支撑块进行升降以配合焊枪的焊接修复,同时配合主动齿轮和被动齿圈进行方向调节,灵活性强。
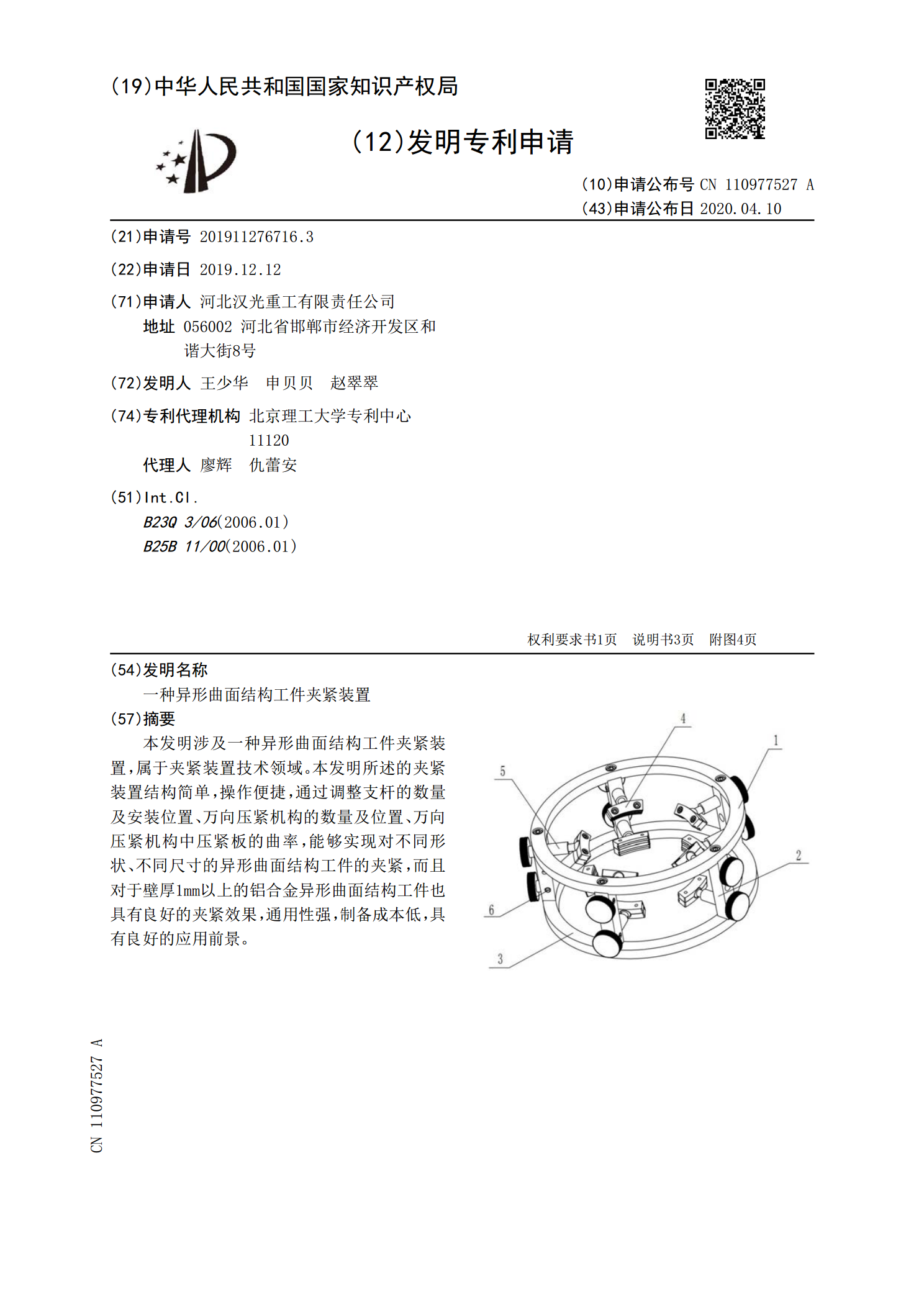
一种异形曲面结构工件夹紧装置.pdf
本发明涉及一种异形曲面结构工件夹紧装置,属于夹紧装置技术领域。本发明所述的夹紧装置结构简单,操作便捷,通过调整支杆的数量及安装位置、万向压紧机构的数量及位置、万向压紧机构中压紧板的曲率,能够实现对不同形状、不同尺寸的异形曲面结构工件的夹紧,而且对于壁厚1mm以上的铝合金异形曲面结构工件也具有良好的夹紧效果,通用性强,制备成本低,具有良好的应用前景。