
一种基于改进人工蜂群算法的OFDM信号峰均比降低方法.pdf

飞舟****文章

1/10
2/10
3/10

4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于改进人工蜂群算法的OFDM信号峰均比降低方法.pdf
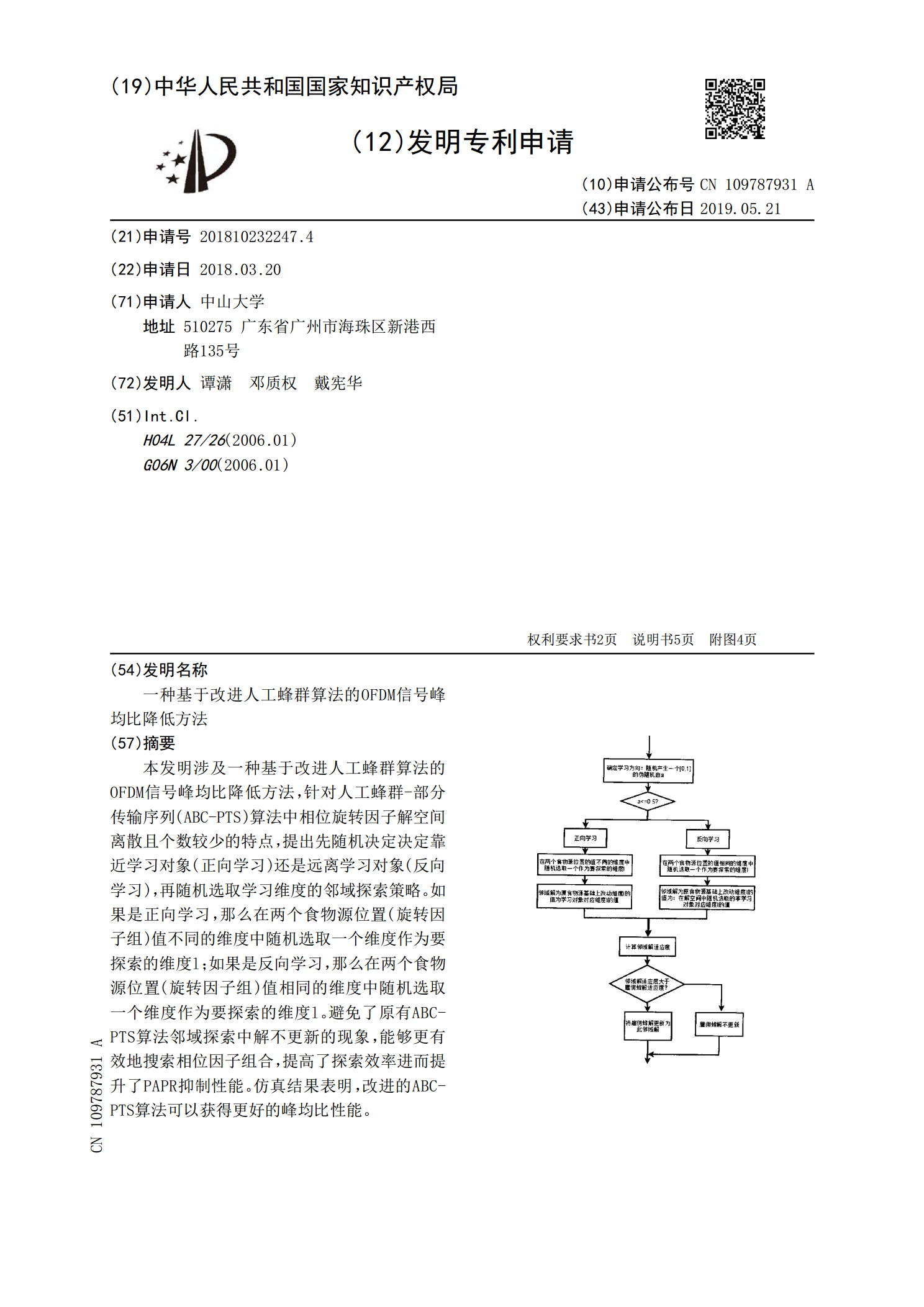
本发明涉及一种基于改进人工蜂群算法的OFDM信号峰均比降低方法,针对人工蜂群‑部分传输序列(ABC‑PTS)算法中相位旋转因子解空间离散且个数较少的特点,提出先随机决定决定靠近学习对象(正向学习)还是远离学习对象(反向学习),再随机选取学习维度的邻域探索策略。如果是正向学习,那么在两个食物源位置(旋转因子组)值不同的维度中随机选取一个维度作为要探索的维度l;如果是反向学习,那么在两个食物源位置(旋转因子组)值相同的维度中随机选取一个维度作为要探索的维度l。避免了原有ABC‑PTS算法邻域探索中解不更新的现

降低OFDM系统峰均比算法的研究.doc
降低OFDM系统峰均比算法的研究正交频分复用(OrthogonalFrequencyDivisionMultiplexing,OFDM)是一种特殊的多载波传输技术,它具有频谱利用率高、抗衰落能力强、抗码间干扰能力强和适合高速数据传输等优点。但OFDM系统还有很多关键问题没有得到很好的解决,如对频偏和相位噪声比较敏感、峰均比(Peak-to-AveragePower,PAPR)大等,这些限制了OFDM技术的应用。而对于降低OFDM信号的PAPR,目前主要采取3类方法,分别为信号预畸变方法、信号扰码方法和信号

降低OFDM系统峰均比算法的研究.doc
降低OFDM系统峰均比算法的研究正交频分复用(OrthogonalFrequencyDivisionMultiplexing,OFDM)是一种特殊的多载波传输技术,它具有频谱利用率高、抗衰落能力强、抗码间干扰能力强和适合高速数据传输等优点。但OFDM系统还有很多关键问题没有得到很好的解决,如对频偏和相位噪声比较敏感、峰均比(Peak-to-AveragePower,PAPR)大等,这些限制了OFDM技术的应用。而对于降低OFDM信号的PAPR,目前主要采取3类方法,分别为信号预畸变方法、信号扰码方法和信号

一种降低OFDM信号峰均功率比的方法.pdf
本发明公开了一种降低OFDM信号峰均功率比的方法,对传统的多音预留技术进行了改进,在峰值消除信号乘上一个优化因子,从而加快了传统多音预留技术的收敛速率,保持了较佳的降低OFDM信号峰均功率比的性能,实现了低复杂度情况下快速降低OFDM信号的峰均功率比。

降低信号峰均功率比算法研究.doc
降低信号峰均功率比算法研究第四代移动通信系统的核心技术,正交频分复用(OrthogonalFrequencyDivisionMultiplexing,OFDM)技术是由多载波调制(Multi-CarrierModulation,MCM)发展而来,由于该技术拥能较好的抗多径衰落和抑制窄带干扰,是目前无线通信系统中实现复杂度低、应用最广的一种多载波传输方案。虽然OFDM系统带来更好的频谱利用率,但同时也存在较高的峰均功率比(PAPR)。高峰值信号在发射时会使大量信号进入高功率放大器(HighPowerAmpl