
基于5G基站充电坪续航的无人机航迹规划方法.pdf

代瑶****zy

1/10
2/10
3/10

4/10
5/10

6/10

7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于5G基站充电坪续航的无人机航迹规划方法.pdf
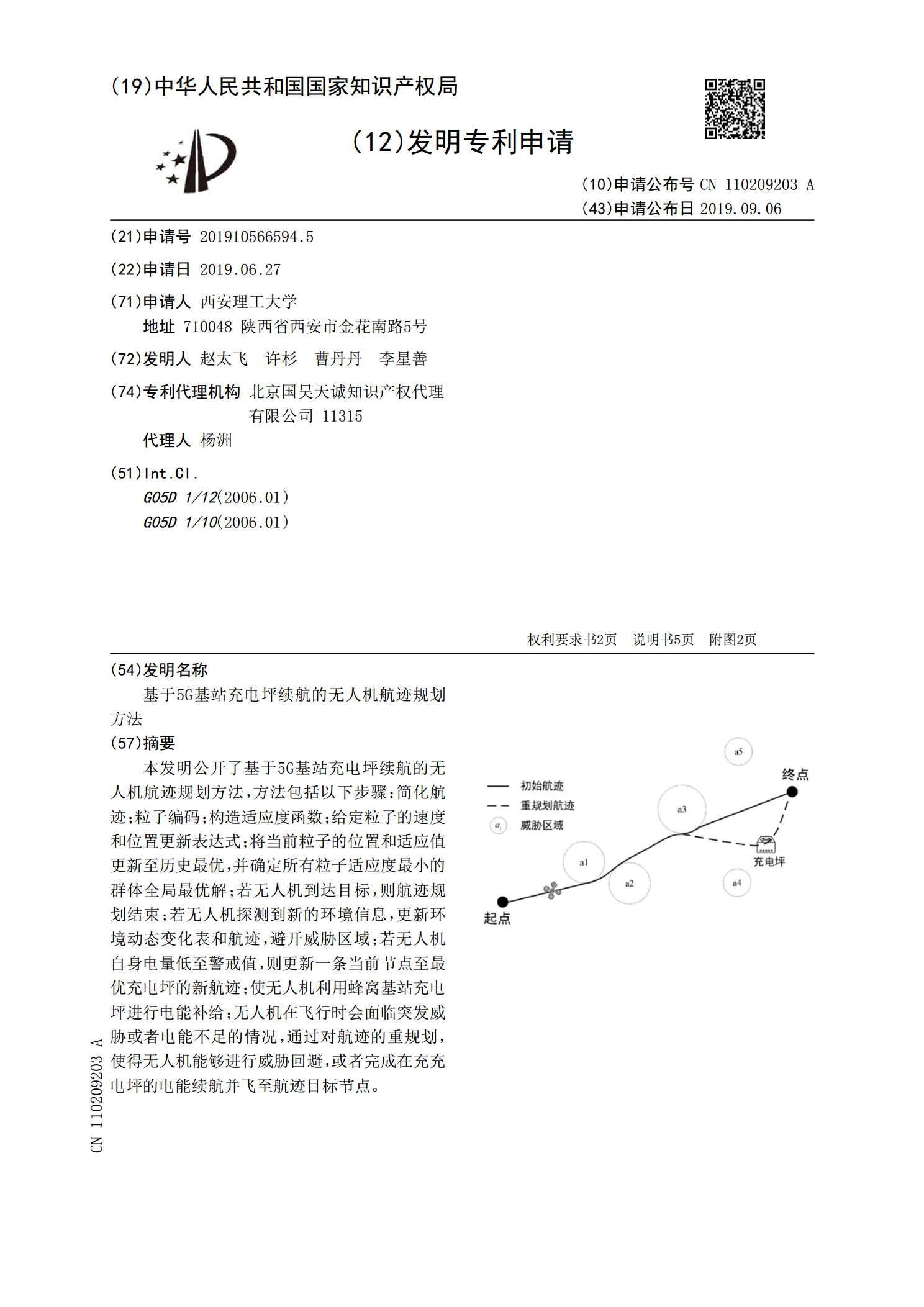
本发明公开了基于5G基站充电坪续航的无人机航迹规划方法,方法包括以下步骤:简化航迹;粒子编码;构造适应度函数;给定粒子的速度和位置更新表达式;将当前粒子的位置和适应值更新至历史最优,并确定所有粒子适应度最小的群体全局最优解;若无人机到达目标,则航迹规划结束;若无人机探测到新的环境信息,更新环境动态变化表和航迹,避开威胁区域;若无人机自身电量低至警戒值,则更新一条当前节点至最优充电坪的新航迹;使无人机利用蜂窝基站充电坪进行电能补给;无人机在飞行时会面临突发威胁或者电能不足的情况,通过对航迹的重规划,使得无人

无人机自主起降5G基站充电坪系统及其充电方法.pdf
无人机自主起降5G基站充电坪系统,包括与信息处理中心通信连接的5G蜂窝基站,5G蜂窝基站上设有充电坪;充电坪上设有充电位、半球形的紫外LED光源、环境传感器、信号发送机;充电位上设有保护罩;充电位上还设有充电平板,与信号发送机无线连接的信号接收机安装无人机的底部;利用无人机自主起降5G基站充电坪系统引导无人机充电的方法,包括以下步骤:步骤1,充电位预约;步骤2,引导无人机降落;步骤3,无人机充电;步骤4,无人机驶离充电坪;可以解决极端条件下通信质量差的问题,提升无线紫外光引导无人机的可靠性。
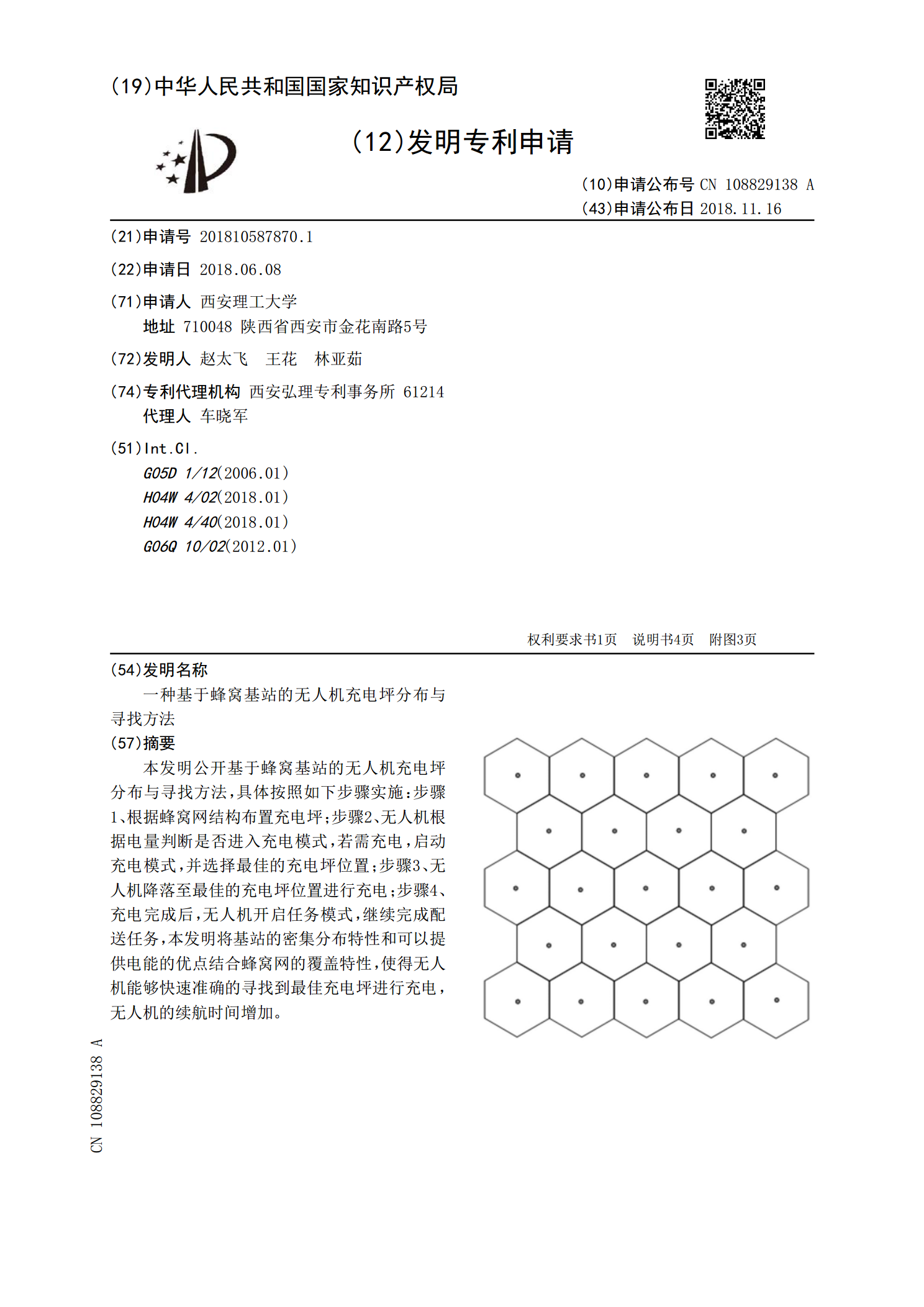
一种基于蜂窝基站的无人机充电坪分布与寻找方法.pdf
本发明公开基于蜂窝基站的无人机充电坪分布与寻找方法,具体按照如下步骤实施:步骤1、根据蜂窝网结构布置充电坪;步骤2、无人机根据电量判断是否进入充电模式,若需充电,启动充电模式,并选择最佳的充电坪位置;步骤3、无人机降落至最佳的充电坪位置进行充电;步骤4、充电完成后,无人机开启任务模式,继续完成配送任务,本发明将基站的密集分布特性和可以提供电能的优点结合蜂窝网的覆盖特性,使得无人机能够快速准确的寻找到最佳充电坪进行充电,无人机的续航时间增加。

一种联网无人机预约5G基站充电坪的最优分配方法及系统.pdf
本发明公开了一种联网无人机预约5G基站充电坪的最优分配方法及系统,通过无人机请求充电时的当前位置信息、剩余电量信息、任务航线信息、充电坪是否为空闲状态,考虑无人机低电能预警信息进行充电坪的最优分配,具有更高的预约稳定性;利用现有的移动通信基站,实现对无人机电量的补给有着良好的基础支持,减少了基础建设的资金投入;各个蜂窝基站的位置固定,便于进行无人机路径规划和充电坪寻址,此外,无人机与基站间和基站与基站之间很容易实现信息交互,可以为无人机提供更全面、更广泛的充电坪信息,有利于最优充电坪的选取。

基于定位精度的无人机编队航迹规划方法.pdf
本发明提供基于定位精度的无人机编队航迹规划方法,包括初步规划和精确规划,初步规划是通过传统启发式算法,考虑无人机飞行过程中的安全性和无人机运动学限制,设置合适的步长对主机进行航迹规划;初步规划生成主机的航迹,并记录主机在每个步长结束时的位置,作为精确规划时需要运算的航迹点;精确规划通过多目标粒子群寻优算法,针对初步规划的主机航迹点运算出从机在安全性、定位精度、路程长度为综合代价并满足无人机最大通信距离、最小防碰撞距离限制的最优航迹。本发明的优势是算法定位精度高、运行时间短。