
用于无人机蜂群协同导航的动态互观测在线建模方法.pdf

梅雪****67

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于无人机蜂群协同导航的动态互观测在线建模方法.pdf
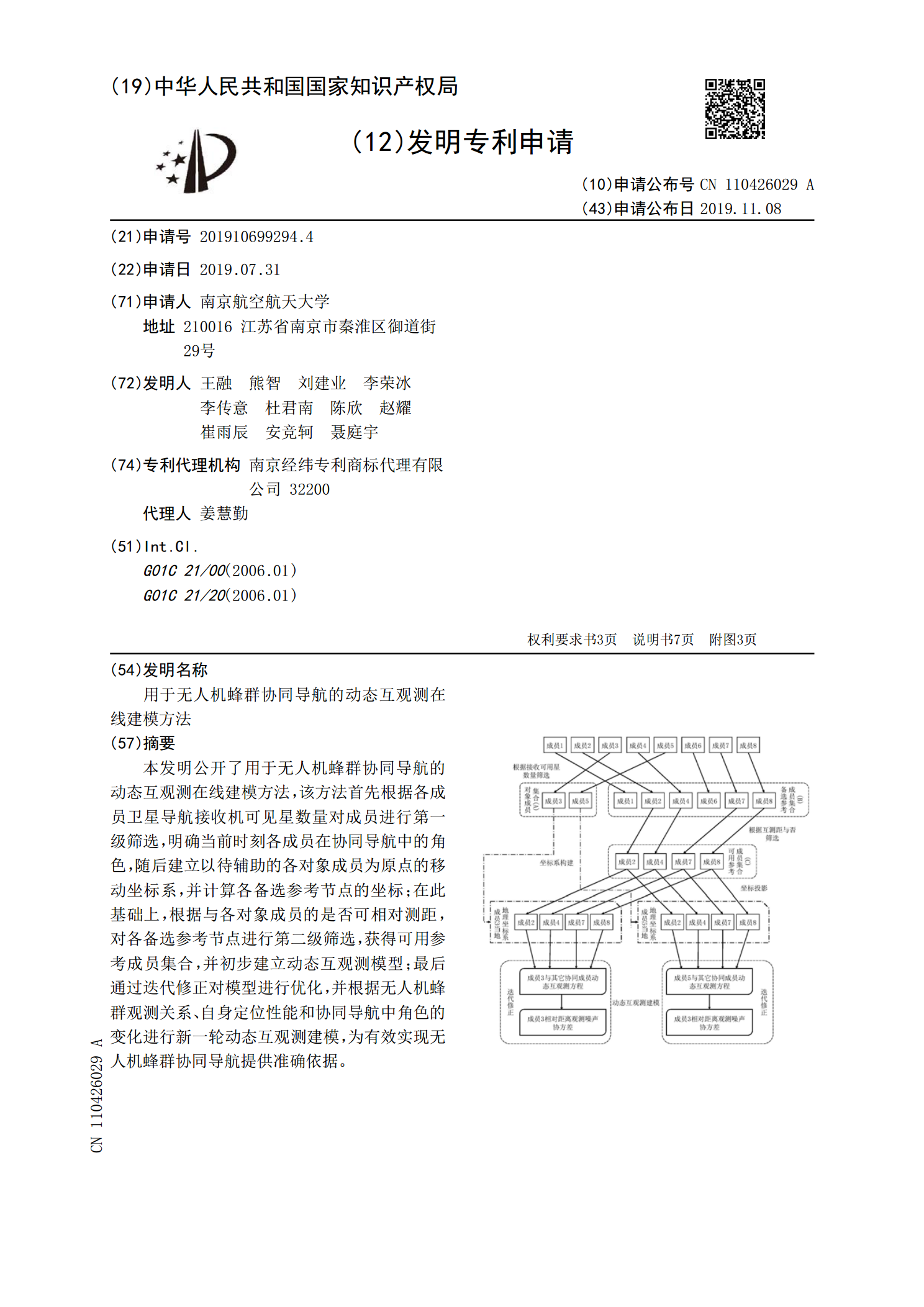
本发明公开了用于无人机蜂群协同导航的动态互观测在线建模方法,该方法首先根据各成员卫星导航接收机可见星数量对成员进行第一级筛选,明确当前时刻各成员在协同导航中的角色,随后建立以待辅助的各对象成员为原点的移动坐标系,并计算各备选参考节点的坐标;在此基础上,根据与各对象成员的是否可相对测距,对各备选参考节点进行第二级筛选,获得可用参考成员集合,并初步建立动态互观测模型;最后通过迭代修正对模型进行优化,并根据无人机蜂群观测关系、自身定位性能和协同导航中角色的变化进行新一轮动态互观测建模,为有效实现无人机蜂群协同导
一种动态互观测关系条件下的无人机蜂群协同导航方法.pdf
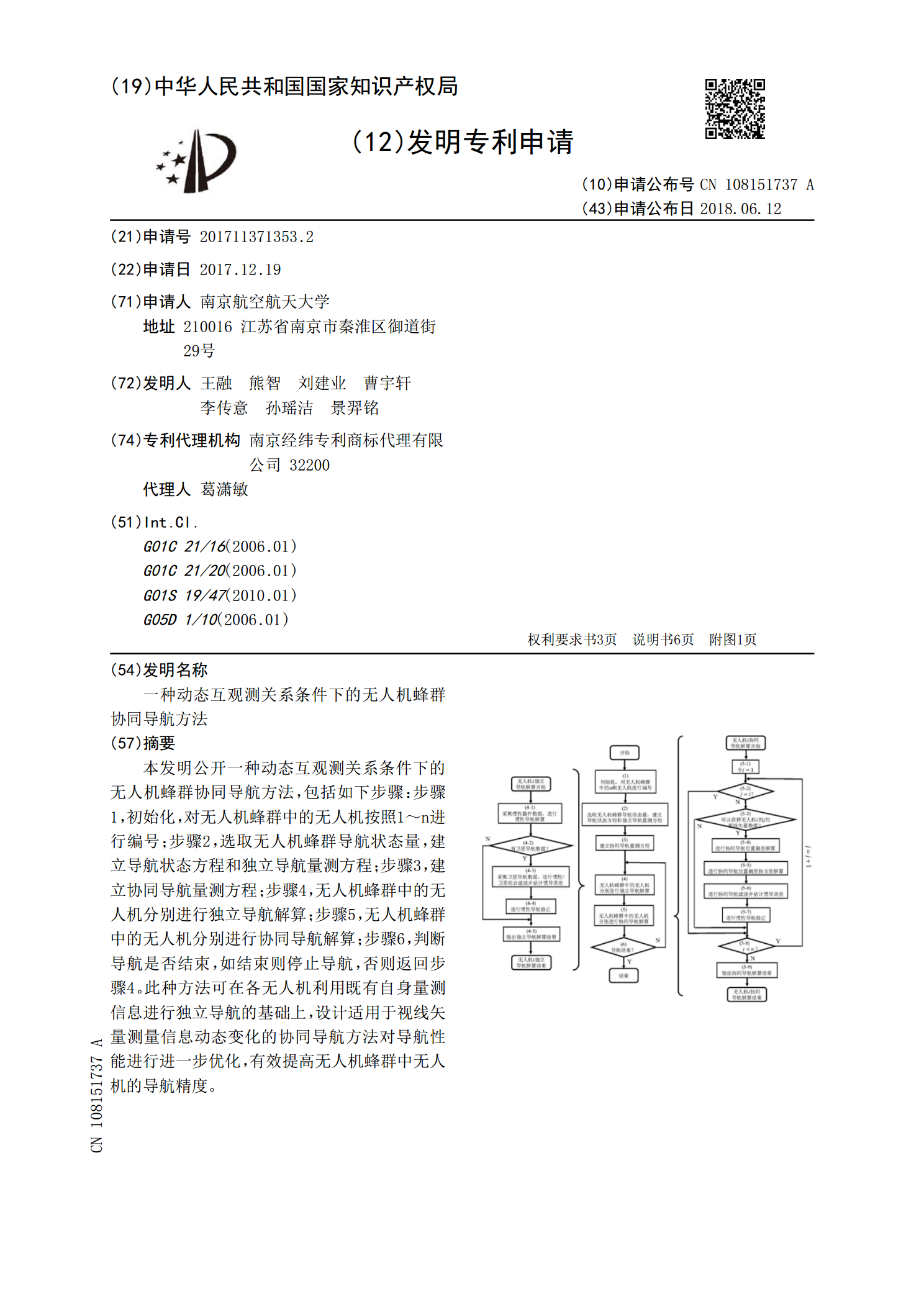
本发明公开一种动态互观测关系条件下的无人机蜂群协同导航方法,包括如下步骤:步骤1,初始化,对无人机蜂群中的无人机按照1~n进行编号;步骤2,选取无人机蜂群导航状态量,建立导航状态方程和独立导航量测方程;步骤3,建立协同导航量测方程;步骤4,无人机蜂群中的无人机分别进行独立导航解算;步骤5,无人机蜂群中的无人机分别进行协同导航解算;步骤6,判断导航是否结束,如结束则停止导航,否则返回步骤4。此种方法可在各无人机利用既有自身量测信息进行独立导航的基础上,设计适用于视线矢量测量信息动态变化的协同导航方法对导航性
一种用于无人机蜂群协同导航的故障在线评估方法.pdf
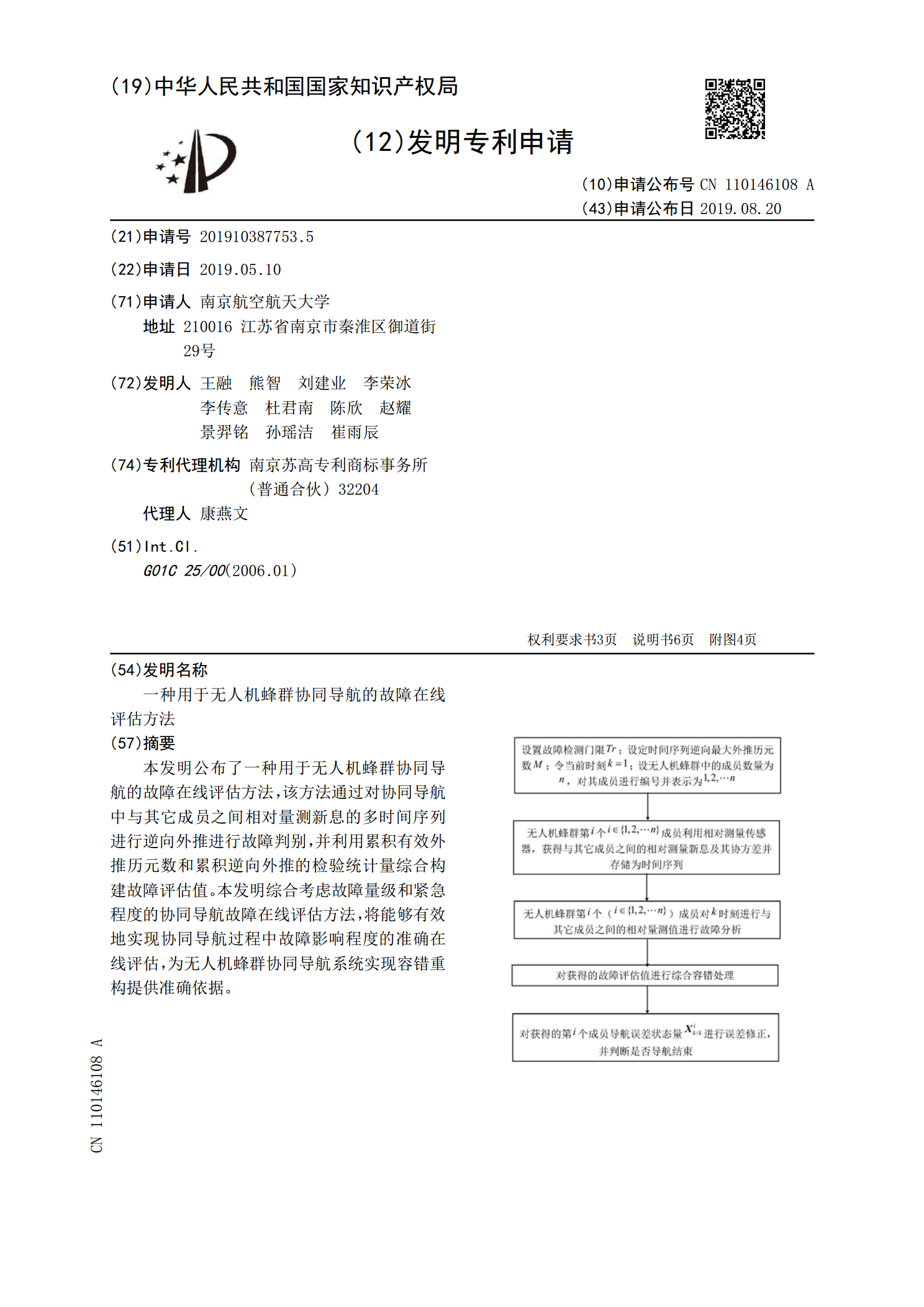
本发明公布了一种用于无人机蜂群协同导航的故障在线评估方法,该方法通过对协同导航中与其它成员之间相对量测新息的多时间序列进行逆向外推进行故障判别,并利用累积有效外推历元数和累积逆向外推的检验统计量综合构建故障评估值。本发明综合考虑故障量级和紧急程度的协同导航故障在线评估方法,将能够有效地实现协同导航过程中故障影响程度的准确在线评估,为无人机蜂群协同导航系统实现容错重构提供准确依据。
一种用于无人机蜂群协同导航的完好性保护水平优化方法.pdf
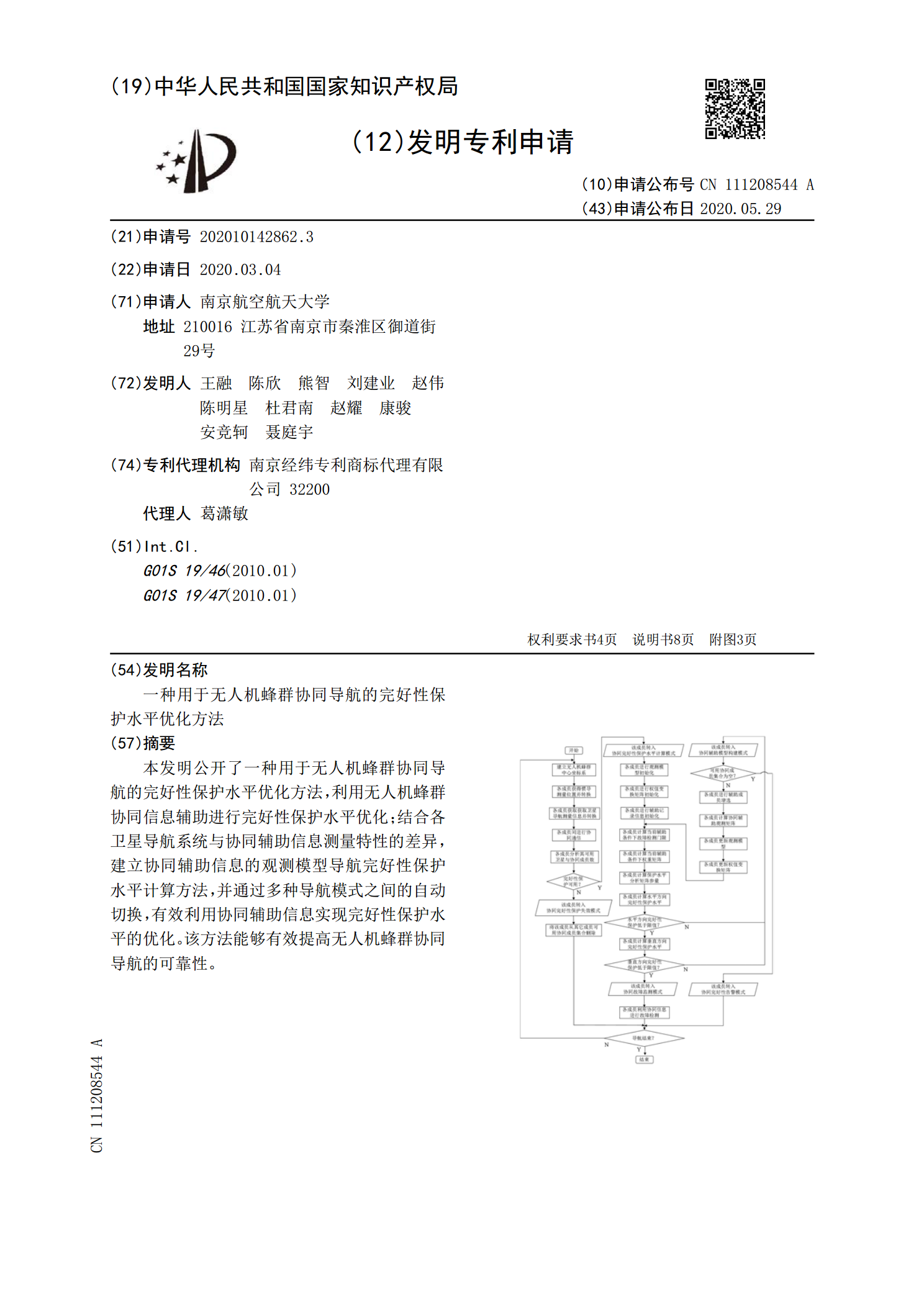
本发明公开了一种用于无人机蜂群协同导航的完好性保护水平优化方法,利用无人机蜂群协同信息辅助进行完好性保护水平优化;结合各卫星导航系统与协同辅助信息测量特性的差异,建立协同辅助信息的观测模型导航完好性保护水平计算方法,并通过多种导航模式之间的自动切换,有效利用协同辅助信息实现完好性保护水平的优化。该方法能够有效提高无人机蜂群协同导航的可靠性。
一种用于无人蜂群协同导航的构型优化方法.pdf
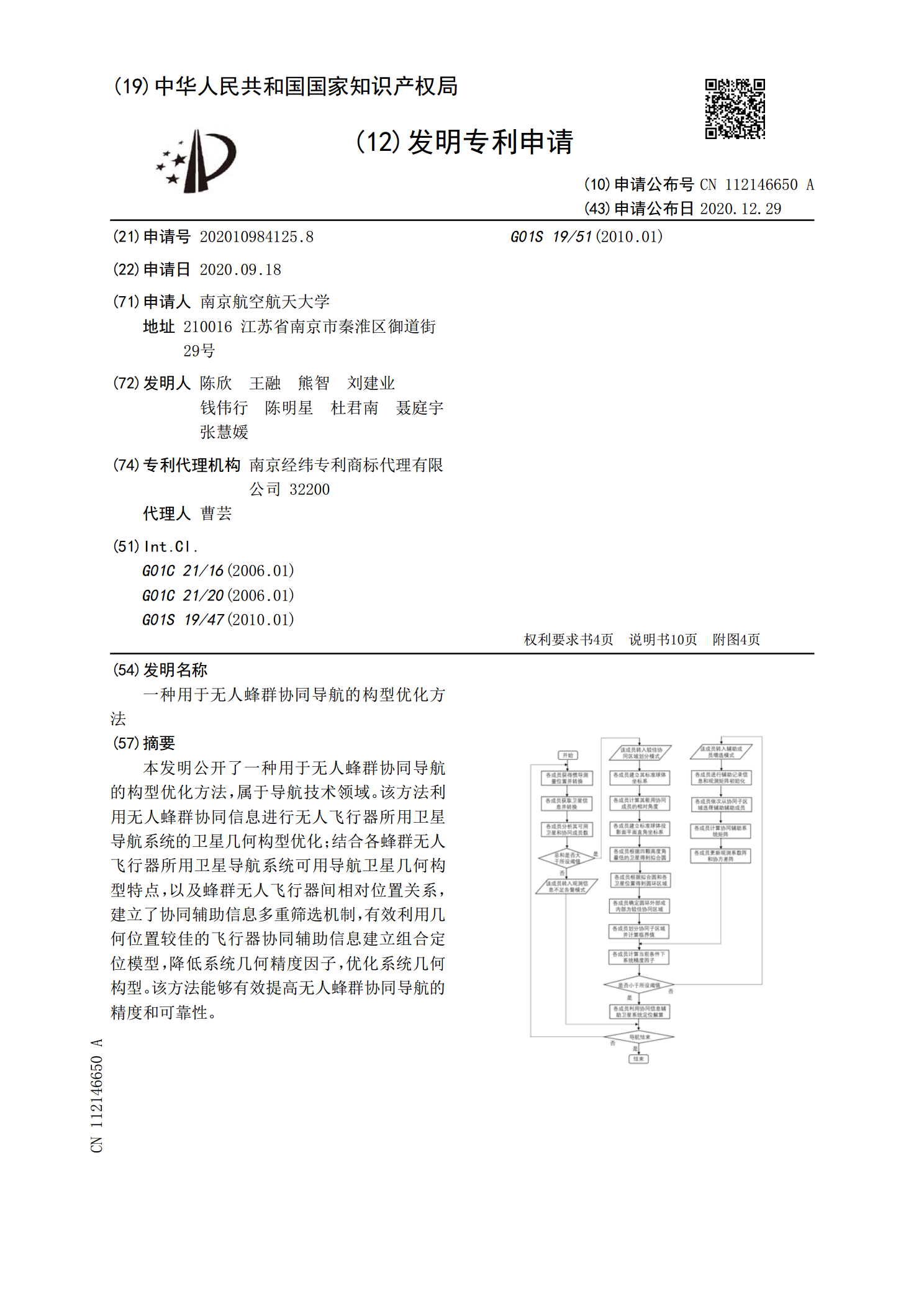
本发明公开了一种用于无人蜂群协同导航的构型优化方法,属于导航技术领域。该方法利用无人蜂群协同信息进行无人飞行器所用卫星导航系统的卫星几何构型优化;结合各蜂群无人飞行器所用卫星导航系统可用导航卫星几何构型特点,以及蜂群无人飞行器间相对位置关系,建立了协同辅助信息多重筛选机制,有效利用几何位置较佳的飞行器协同辅助信息建立组合定位模型,降低系统几何精度因子,优化系统几何构型。该方法能够有效提高无人蜂群协同导航的精度和可靠性。