
一种基于热红外成像的喷雾雾形检测装置和方法.pdf

论文****轩吖

1/10
2/10
3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于热红外成像的喷雾雾形检测装置和方法.pdf
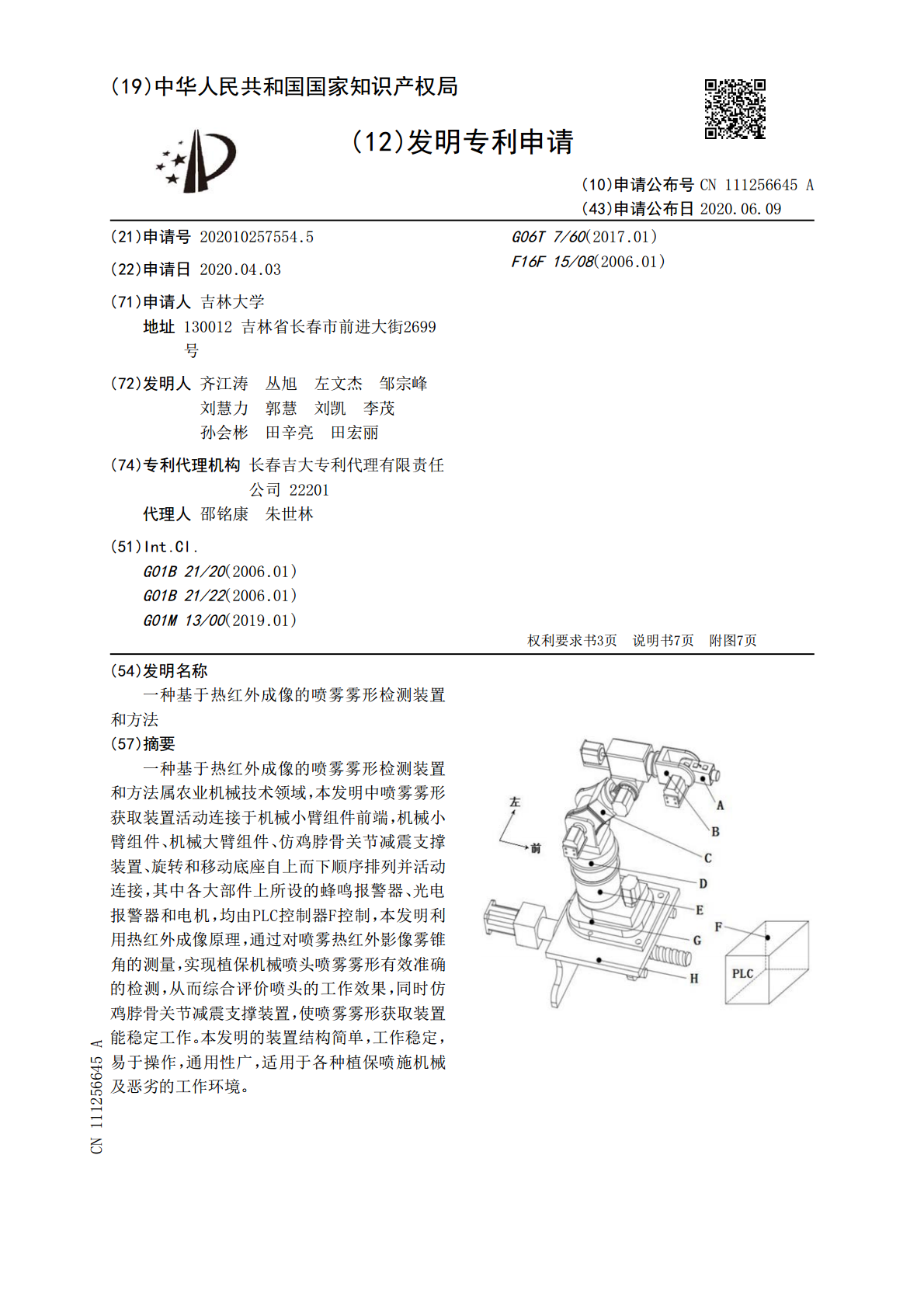
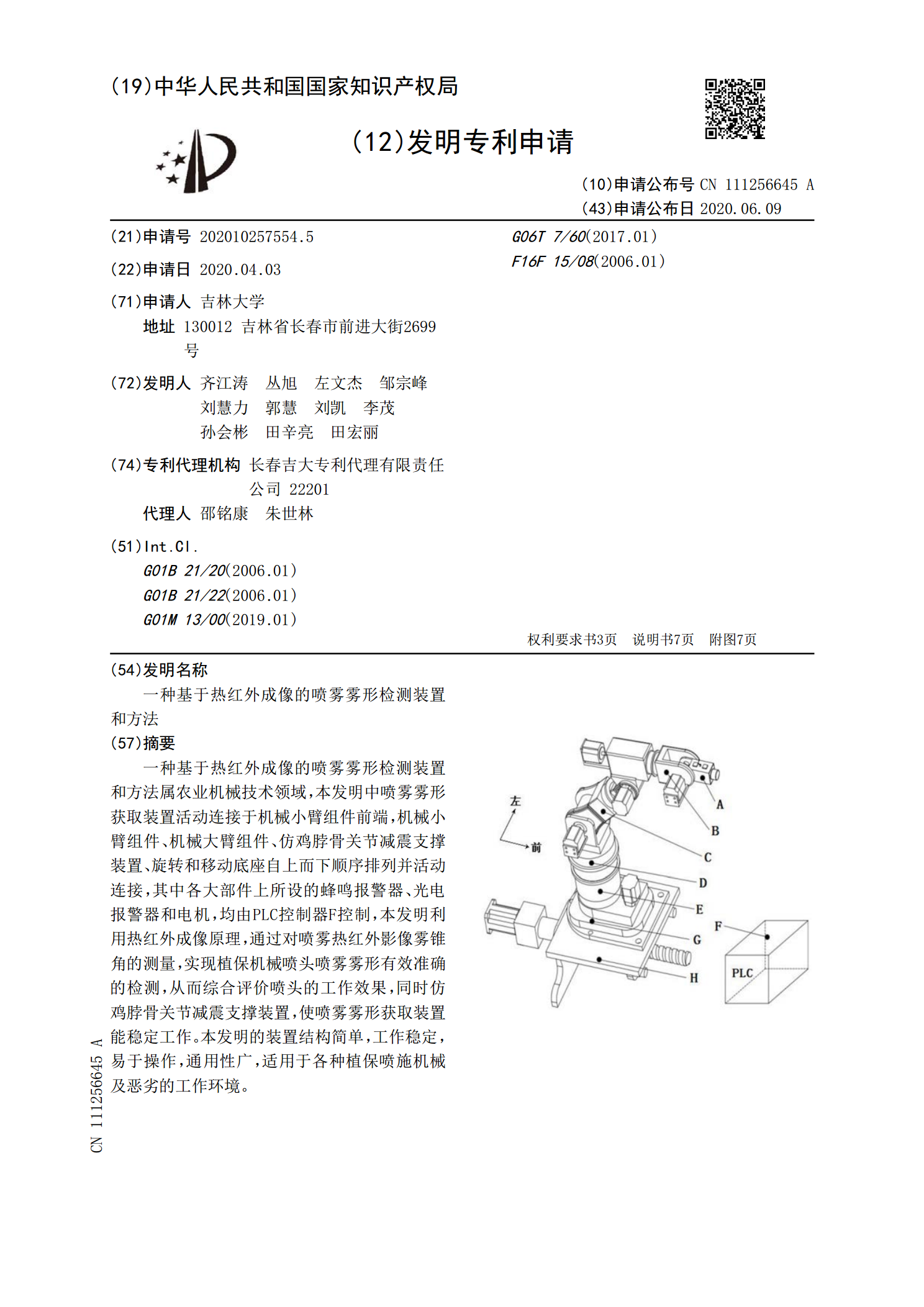
一种基于热红外成像的喷雾雾形检测装置和方法属农业机械技术领域,本发明中喷雾雾形获取装置活动连接于机械小臂组件前端,机械小臂组件、机械大臂组件、仿鸡脖骨关节减震支撑装置、旋转和移动底座自上而下顺序排列并活动连接,其中各大部件上所设的蜂鸣报警器、光电报警器和电机,均由PLC控制器F控制,本发明利用热红外成像原理,通过对喷雾热红外影像雾锥角的测量,实现植保机械喷头喷雾雾形有效准确的检测,从而综合评价喷头的工作效果,同时仿鸡脖骨关节减震支撑装置,使喷雾雾形获取装置能稳定工作。本发明的装置结构简单,工作稳定,易于操
一种基于深度学习和红外热成像的母猪发情检测方法.pdf
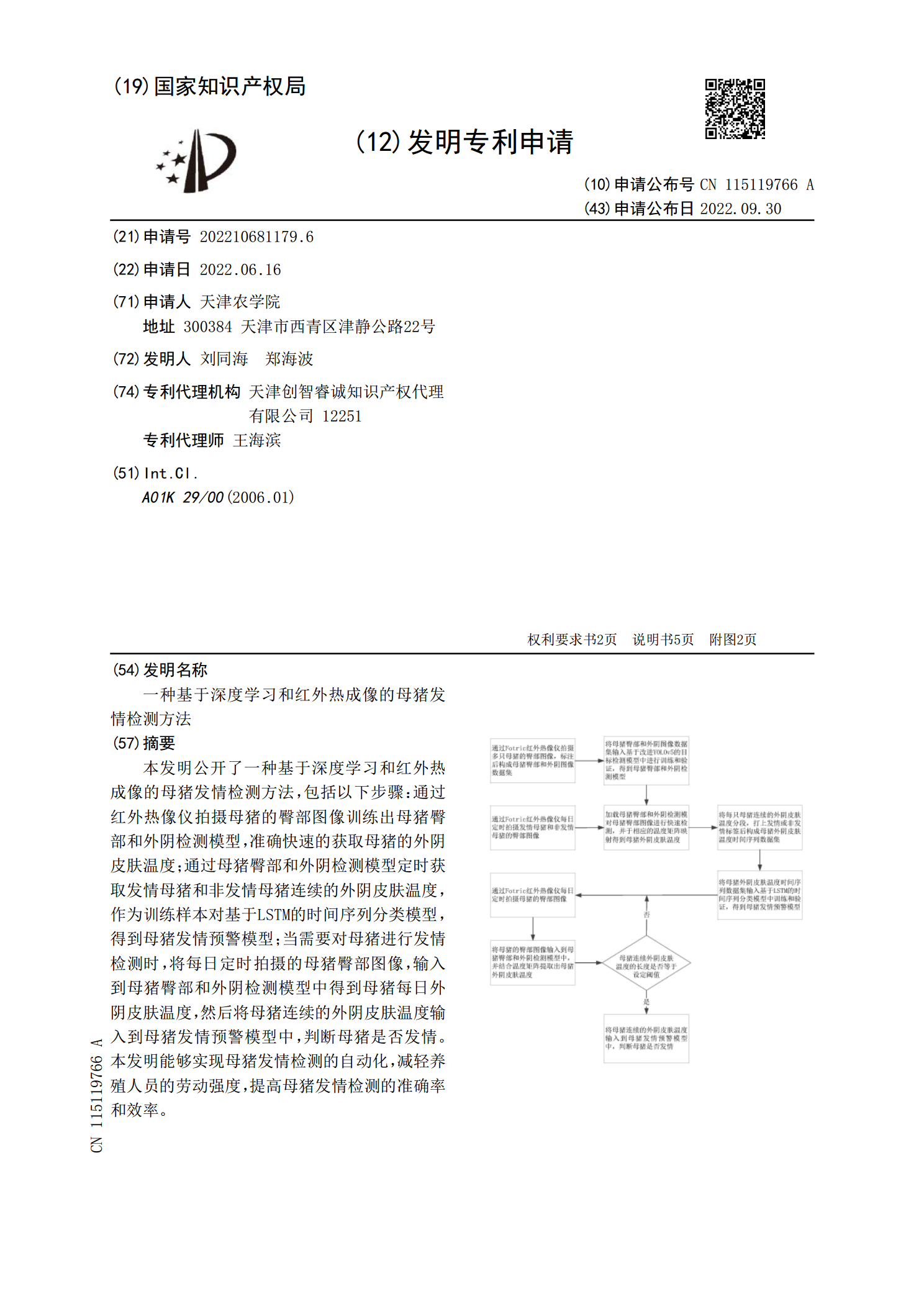
本发明公开了一种基于深度学习和红外热成像的母猪发情检测方法,包括以下步骤:通过红外热像仪拍摄母猪的臀部图像训练出母猪臀部和外阴检测模型,准确快速的获取母猪的外阴皮肤温度;通过母猪臀部和外阴检测模型定时获取发情母猪和非发情母猪连续的外阴皮肤温度,作为训练样本对基于LSTM的时间序列分类模型,得到母猪发情预警模型;当需要对母猪进行发情检测时,将每日定时拍摄的母猪臀部图像,输入到母猪臀部和外阴检测模型中得到母猪每日外阴皮肤温度,然后将母猪连续的外阴皮肤温度输入到母猪发情预警模型中,判断母猪是否发情。本发明能够实

一种基于安卓系统的红外热成像图像读取装置和方法.pdf
本发明涉及一种基于安卓系统的红外热成像图像读取装置和方法,该装置包括控制器,控制器与USB切换装置连接,USB切换装置一侧与第一USB、第二USB和USB接口连接;USB切换装置用于切换第一USB和第二USB,第一USB和第二USB不能同时打开切只能开一个。本发明可以使一个USB接口接两个USB设备进行智能切换,同时保留安卓系统原有的OTG功能。本发明通过控制器控制进行智能切换,根据需要连接不同的USB设备,能够满足多个USB端口需要,且开发成本低,使用更加智能。

一种热红外高光谱成像仪盲元检测装置和方法.pdf
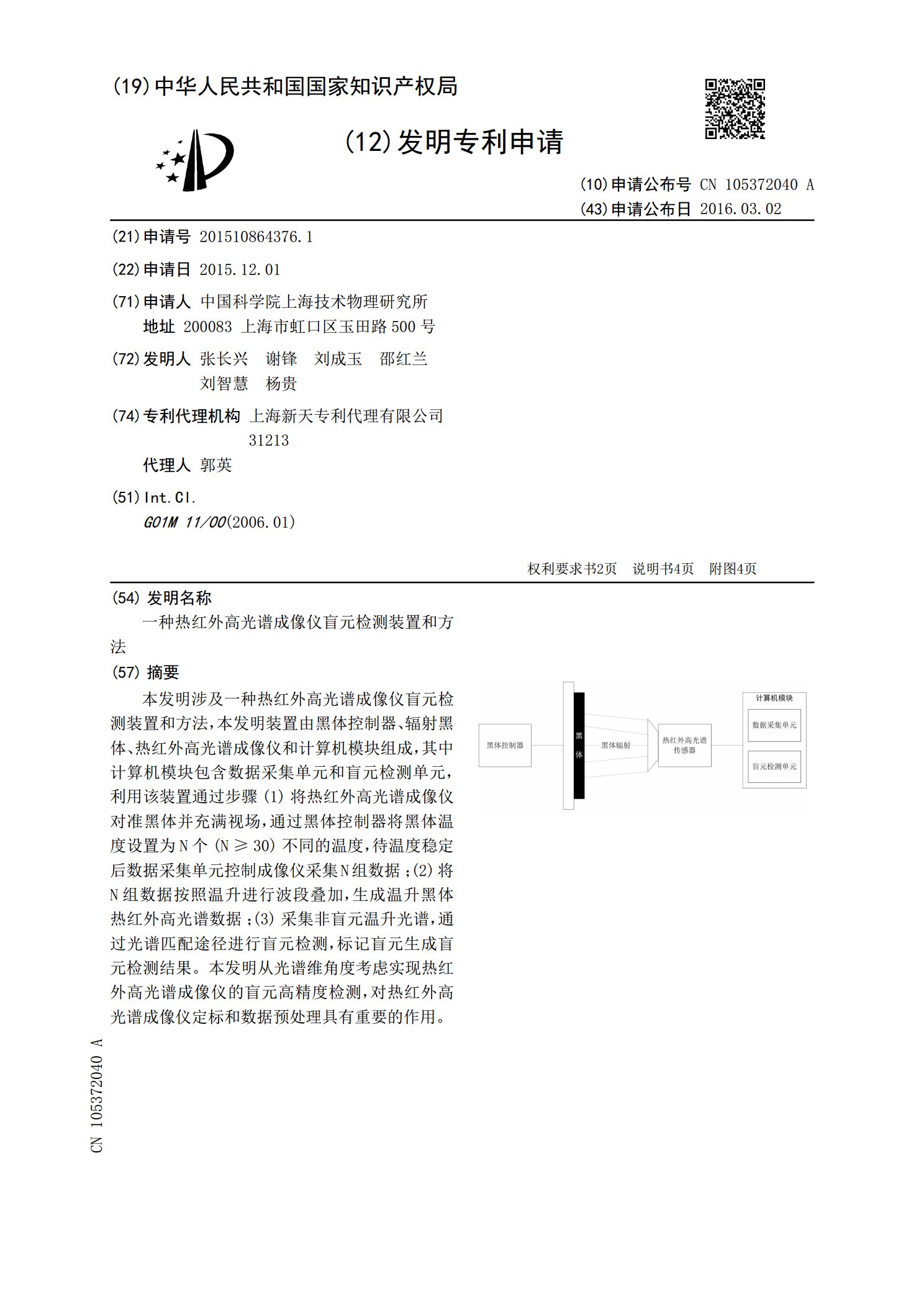
本发明涉及一种热红外高光谱成像仪盲元检测装置和方法,本发明装置包括黑体控制器、标准黑体、热红外高光谱成像仪和计算机模块,该装置通过步骤(1)将热红外高光谱成像仪对准标准黑体并充满视场,通过黑体控制器将标准黑体温度设置为N个不同的温度,待温度稳定后发射的辐射光被热红外高光谱成像仪接收,计算机模块控制热红外高光谱成像仪采集N组数据;(2)将N组数据按照温升进行波段叠加,生成温升黑体热红外高光谱数据;(3)采集非盲元温升光谱,通过光谱匹配途径进行盲元检测,标记盲元生成盲元检测结果。本发明从光谱维角度考虑实现热红
一种热红外高光谱成像仪盲元检测装置和方法.pdf
本发明涉及一种热红外高光谱成像仪盲元检测装置和方法,本发明装置由黑体控制器、辐射黑体、热红外高光谱成像仪和计算机模块组成,其中计算机模块包含数据采集单元和盲元检测单元,利用该装置通过步骤(1)将热红外高光谱成像仪对准黑体并充满视场,通过黑体控制器将黑体温度设置为N个(N≥30)不同的温度,待温度稳定后数据采集单元控制成像仪采集N组数据;(2)将N组数据按照温升进行波段叠加,生成温升黑体热红外高光谱数据;(3)采集非盲元温升光谱,通过光谱匹配途径进行盲元检测,标记盲元生成盲元检测结果。本发明从光谱维角度考虑