
一种叉车机器人空间定位装置.pdf

小宏****aa

1/7
2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种叉车机器人空间定位装置.pdf
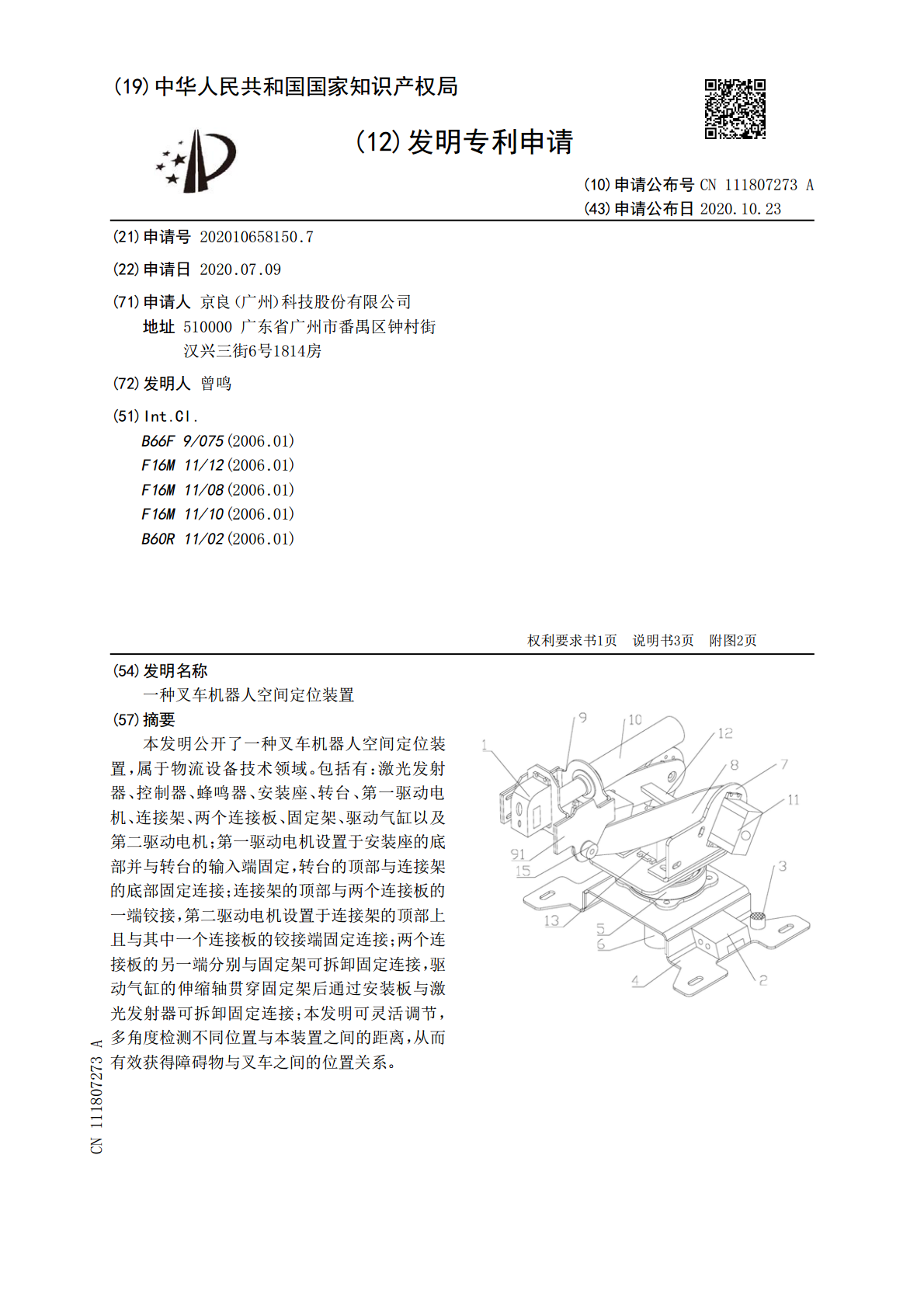
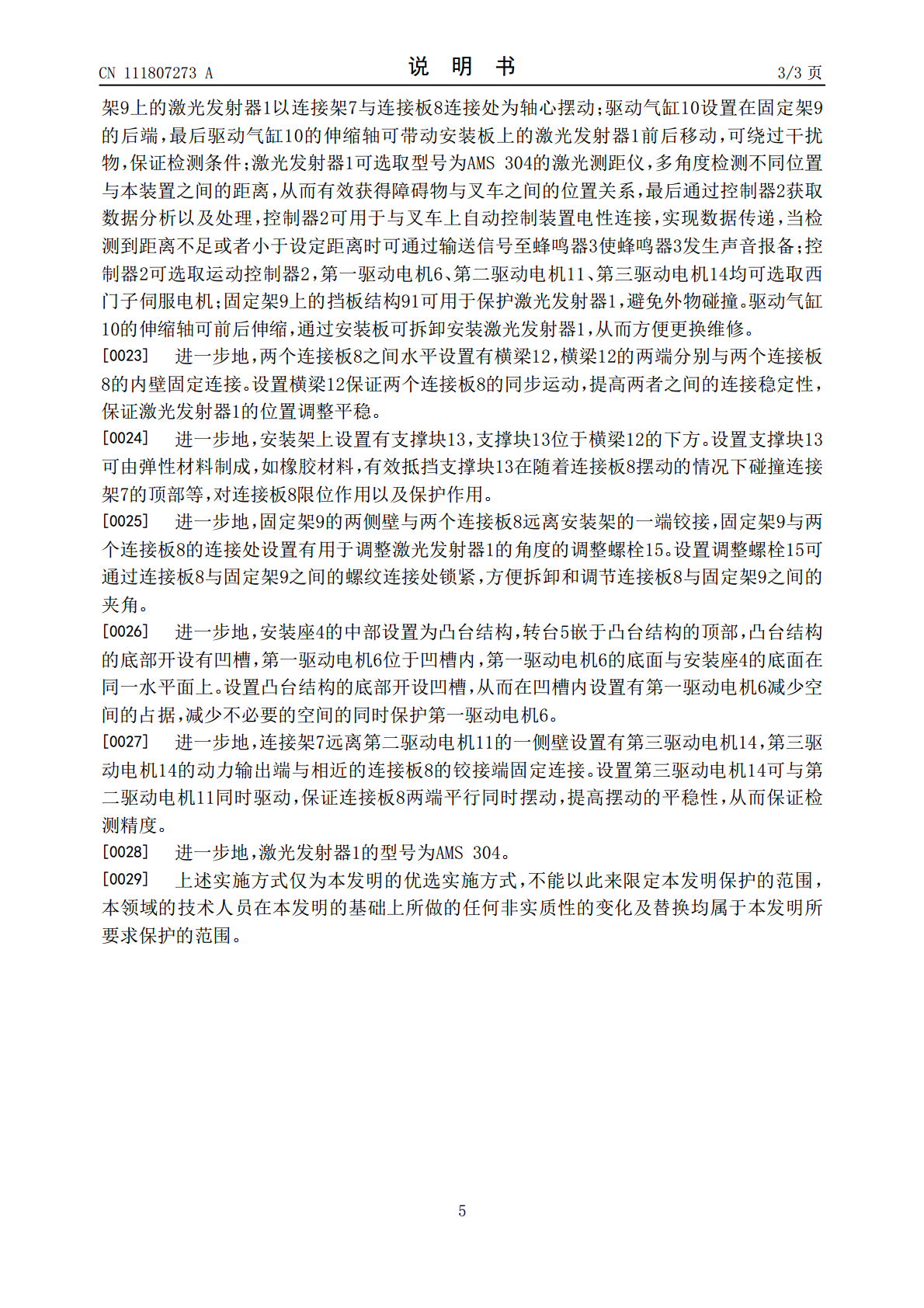
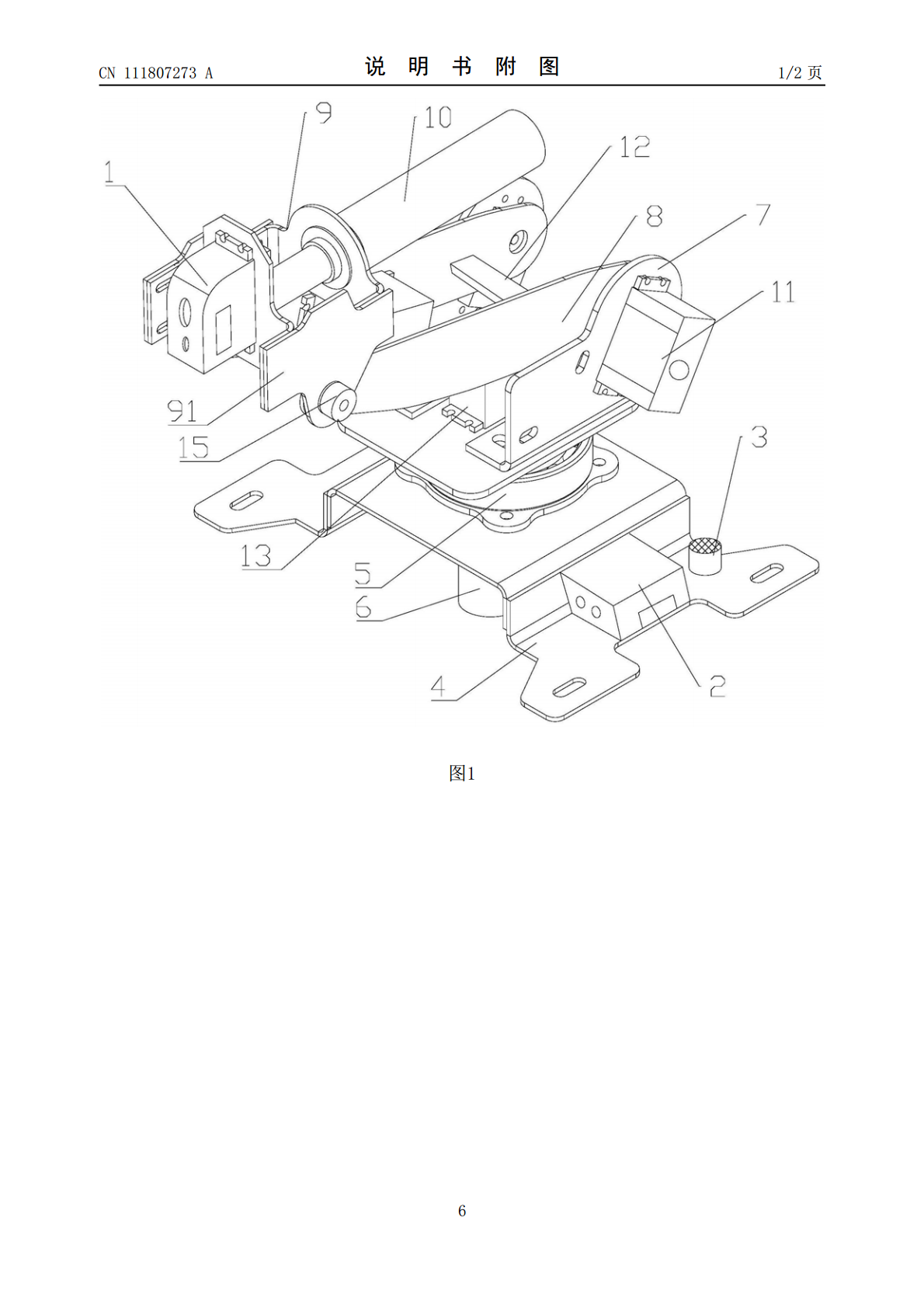
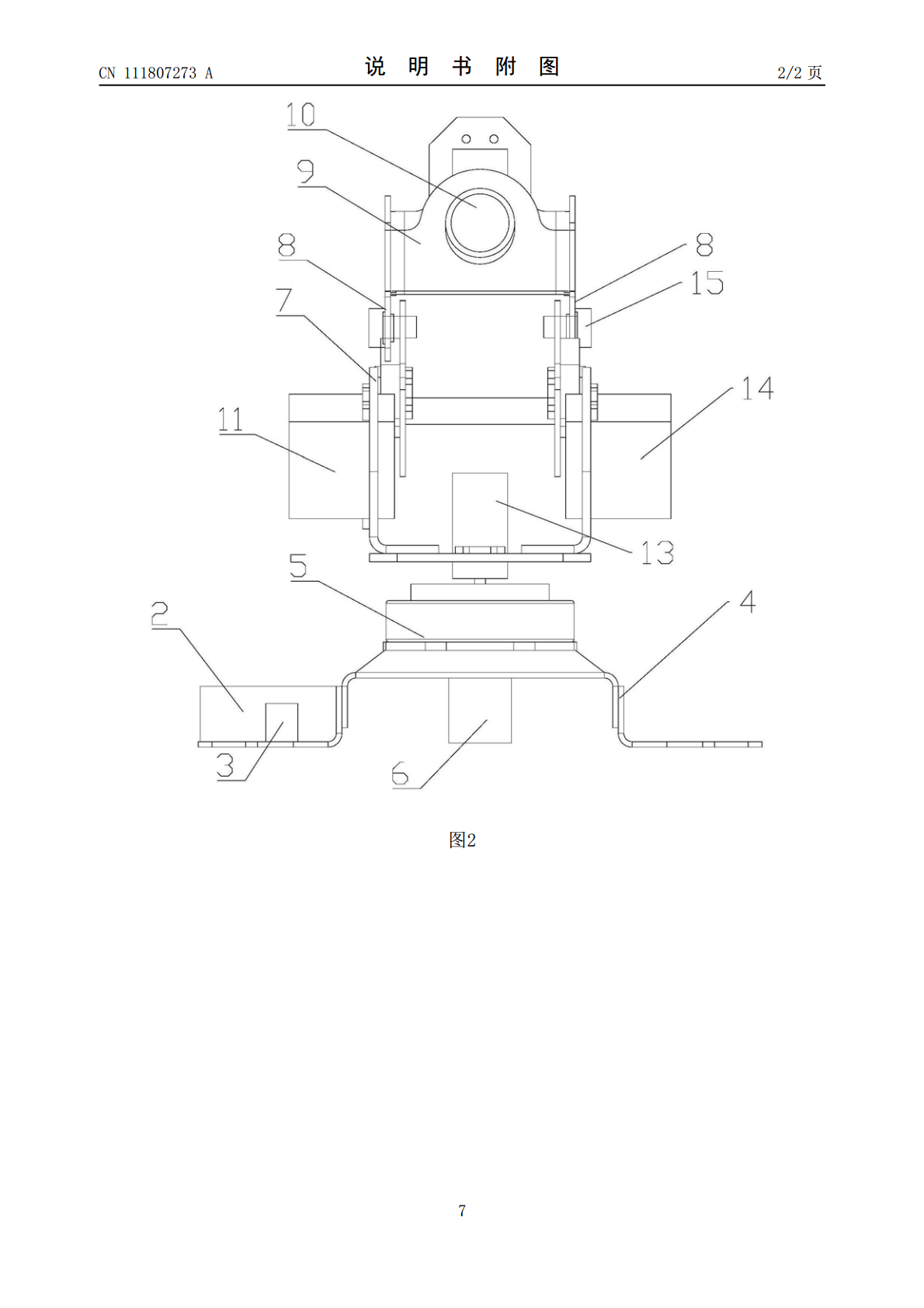
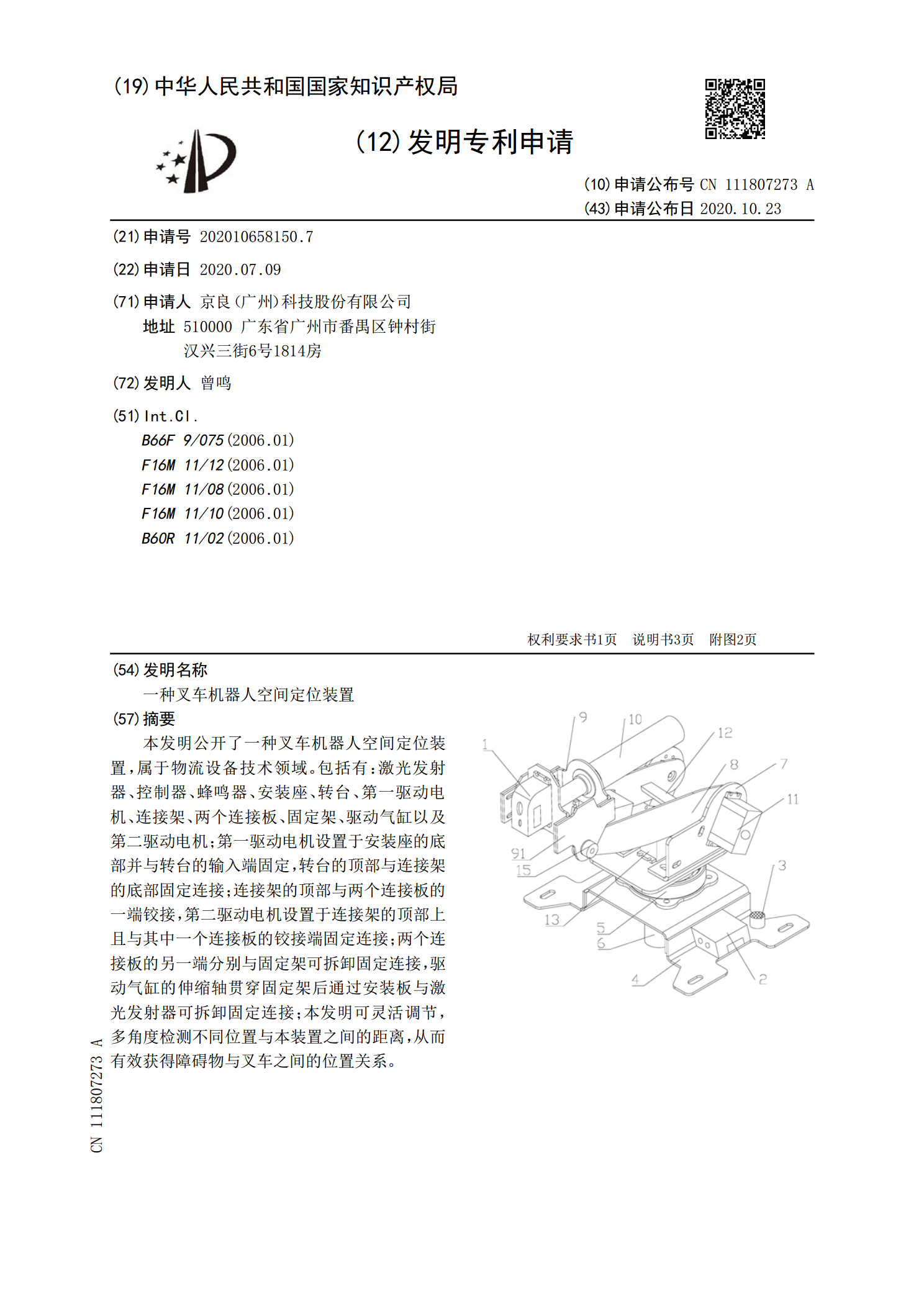
本发明公开了一种叉车机器人空间定位装置,属于物流设备技术领域。包括有:激光发射器、控制器、蜂鸣器、安装座、转台、第一驱动电机、连接架、两个连接板、固定架、驱动气缸以及第二驱动电机;第一驱动电机设置于安装座的底部并与转台的输入端固定,转台的顶部与连接架的底部固定连接;连接架的顶部与两个连接板的一端铰接,第二驱动电机设置于连接架的顶部上且与其中一个连接板的铰接端固定连接;两个连接板的另一端分别与固定架可拆卸固定连接,驱动气缸的伸缩轴贯穿固定架后通过安装板与激光发射器可拆卸固定连接;本发明可灵活调节,多角度检测
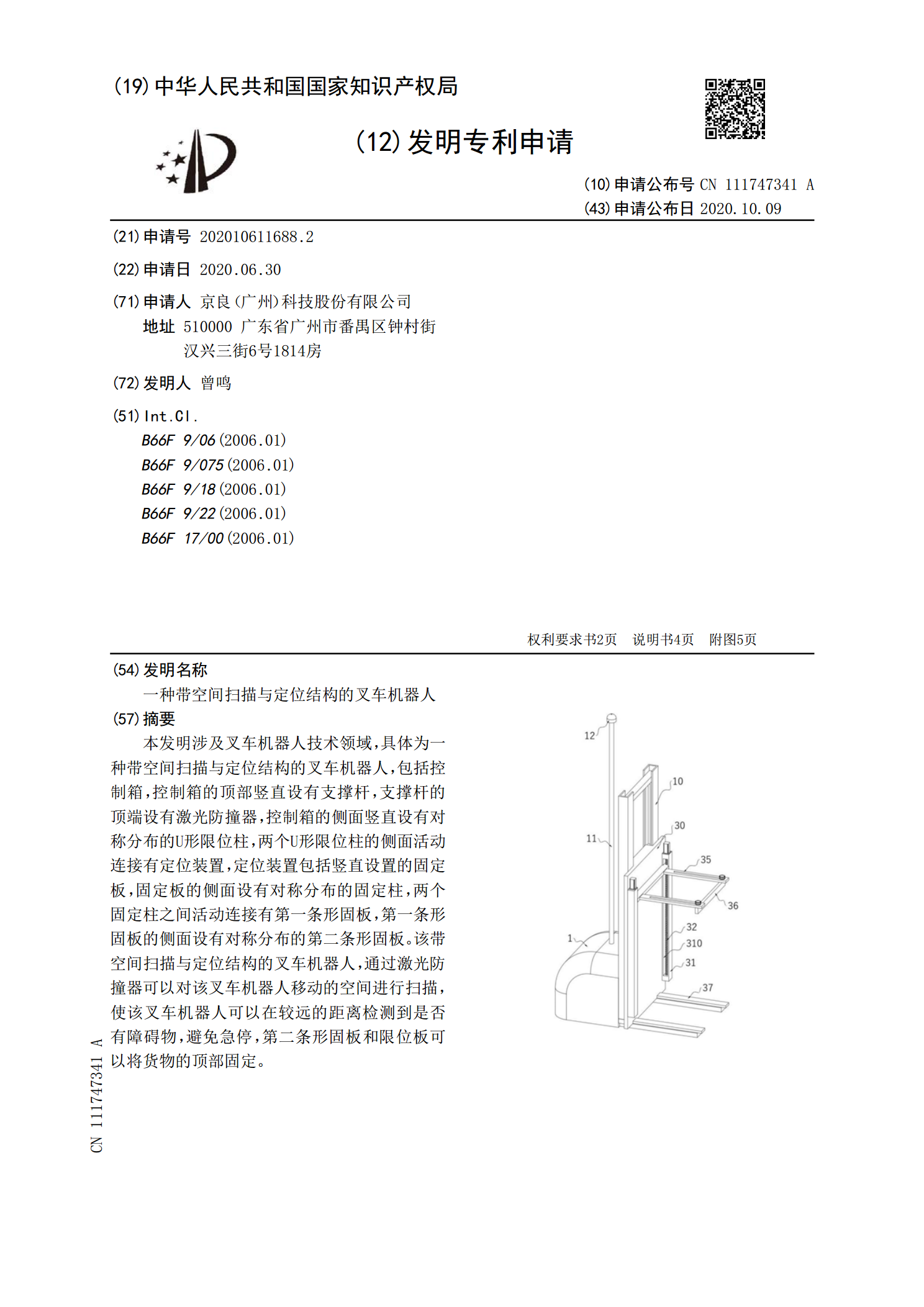
一种带空间扫描与定位结构的叉车机器人.pdf
本发明涉及叉车机器人技术领域,具体为一种带空间扫描与定位结构的叉车机器人,包括控制箱,控制箱的顶部竖直设有支撑杆,支撑杆的顶端设有激光防撞器,控制箱的侧面竖直设有对称分布的U形限位柱,两个U形限位柱的侧面活动连接有定位装置,定位装置包括竖直设置的固定板,固定板的侧面设有对称分布的固定柱,两个固定柱之间活动连接有第一条形固板,第一条形固板的侧面设有对称分布的第二条形固板。该带空间扫描与定位结构的叉车机器人,通过激光防撞器可以对该叉车机器人移动的空间进行扫描,使该叉车机器人可以在较远的距离检测到是否有障碍物,
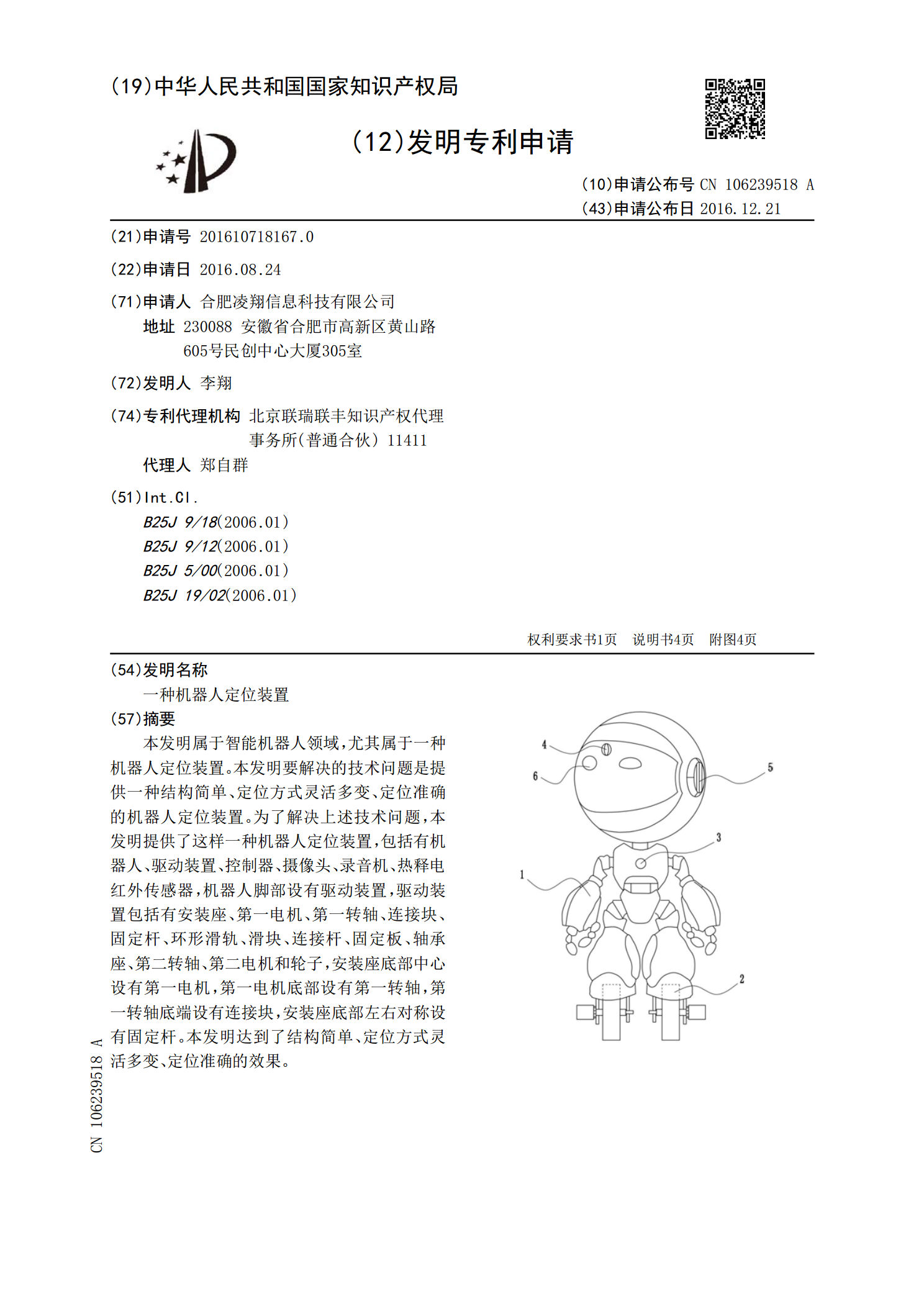
一种机器人定位装置.pdf
本发明属于智能机器人领域,尤其属于一种机器人定位装置。本发明要解决的技术问题是提供一种结构简单、定位方式灵活多变、定位准确的机器人定位装置。为了解决上述技术问题,本发明提供了这样一种机器人定位装置,包括有机器人、驱动装置、控制器、摄像头、录音机、热释电红外传感器,机器人脚部设有驱动装置,驱动装置包括有安装座、第一电机、第一转轴、连接块、固定杆、环形滑轨、滑块、连接杆、固定板、轴承座、第二转轴、第二电机和轮子,安装座底部中心设有第一电机,第一电机底部设有第一转轴,第一转轴底端设有连接块,安装座底部左右对称设
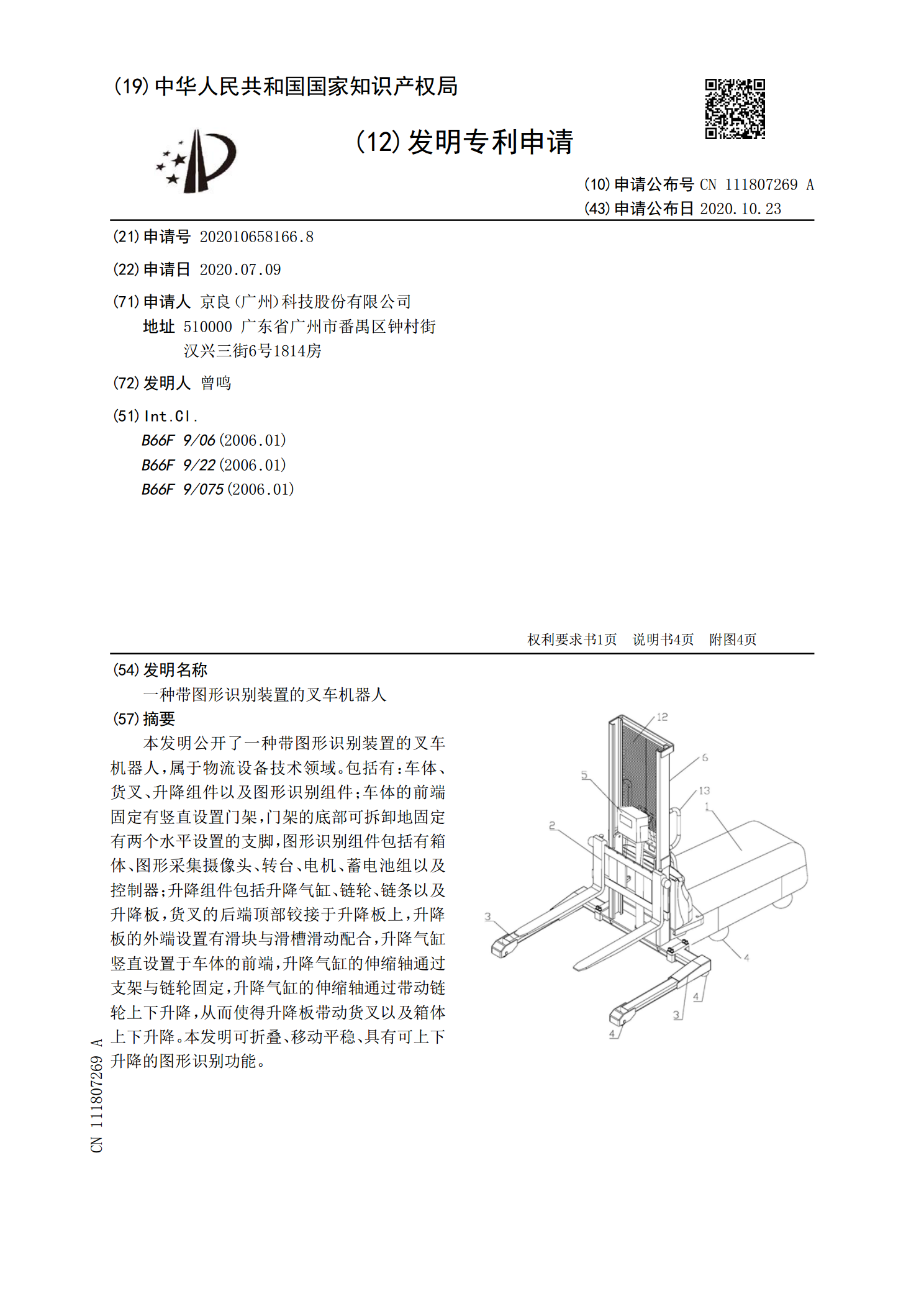
一种带图形识别装置的叉车机器人.pdf
本发明公开了一种带图形识别装置的叉车机器人,属于物流设备技术领域。包括有:车体、货叉、升降组件以及图形识别组件;车体的前端固定有竖直设置门架,门架的底部可拆卸地固定有两个水平设置的支脚,图形识别组件包括有箱体、图形采集摄像头、转台、电机、蓄电池组以及控制器;升降组件包括升降气缸、链轮、链条以及升降板,货叉的后端顶部铰接于升降板上,升降板的外端设置有滑块与滑槽滑动配合,升降气缸竖直设置于车体的前端,升降气缸的伸缩轴通过支架与链轮固定,升降气缸的伸缩轴通过带动链轮上下升降,从而使得升降板带动货叉以及箱体上下升
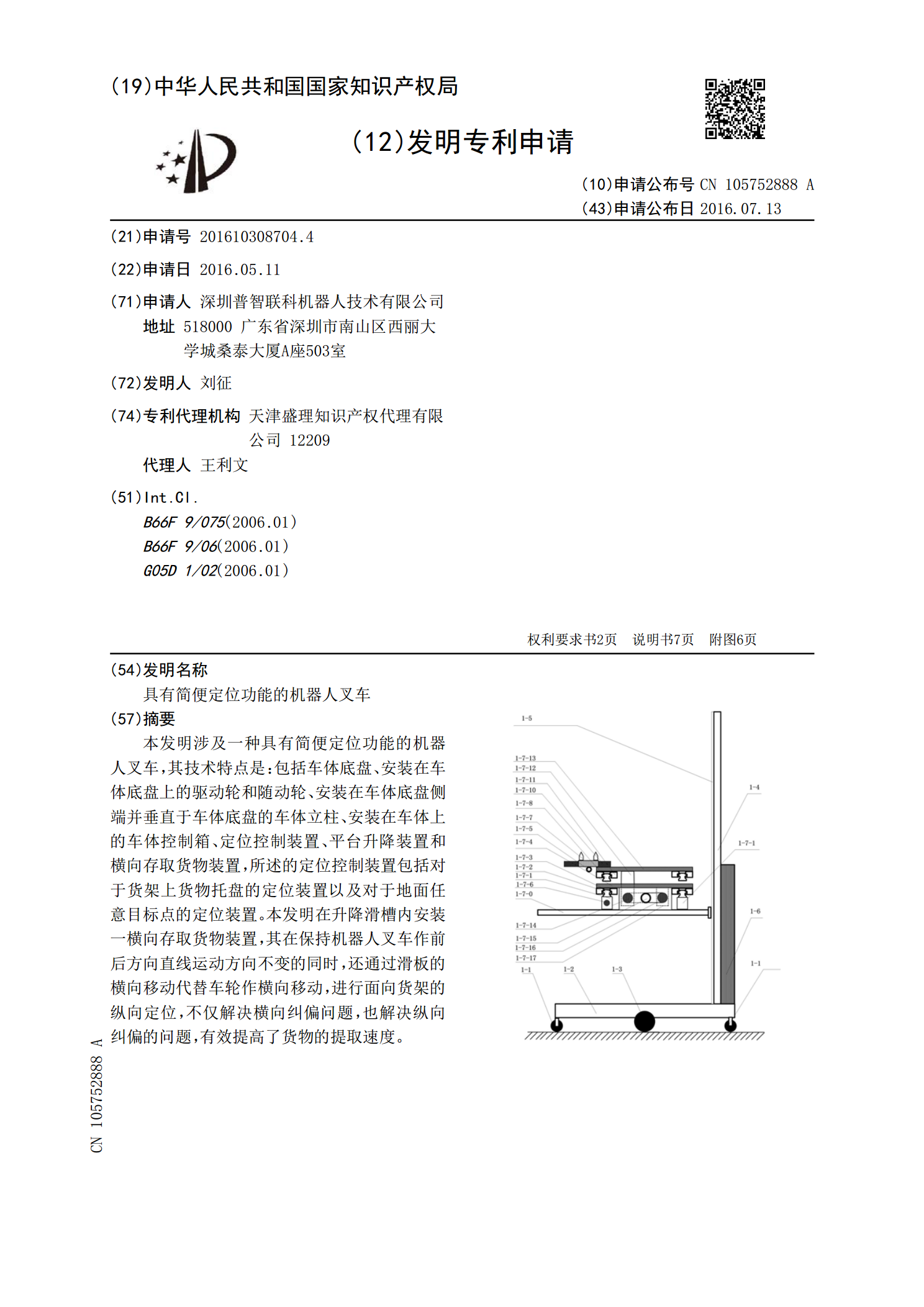
具有简便定位功能的机器人叉车.pdf
本发明涉及一种具有简便定位功能的机器人叉车,其技术特点是:包括车体底盘、安装在车体底盘上的驱动轮和随动轮、安装在车体底盘侧端并垂直于车体底盘的车体立柱、安装在车体上的车体控制箱、定位控制装置、平台升降装置和横向存取货物装置,所述的定位控制装置包括对于货架上货物托盘的定位装置以及对于地面任意目标点的定位装置。本发明在升降滑槽内安装一横向存取货物装置,其在保持机器人叉车作前后方向直线运动方向不变的同时,还通过滑板的横向移动代替车轮作横向移动,进行面向货架的纵向定位,不仅解决横向纠偏问题,也解决纵向纠偏的问题,