
基于精英学习的多蜂群海域环境自适应搜索算法.pdf

灵慧****89

1/10
2/10
3/10

4/10
5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于精英学习的多蜂群海域环境自适应搜索算法.pdf
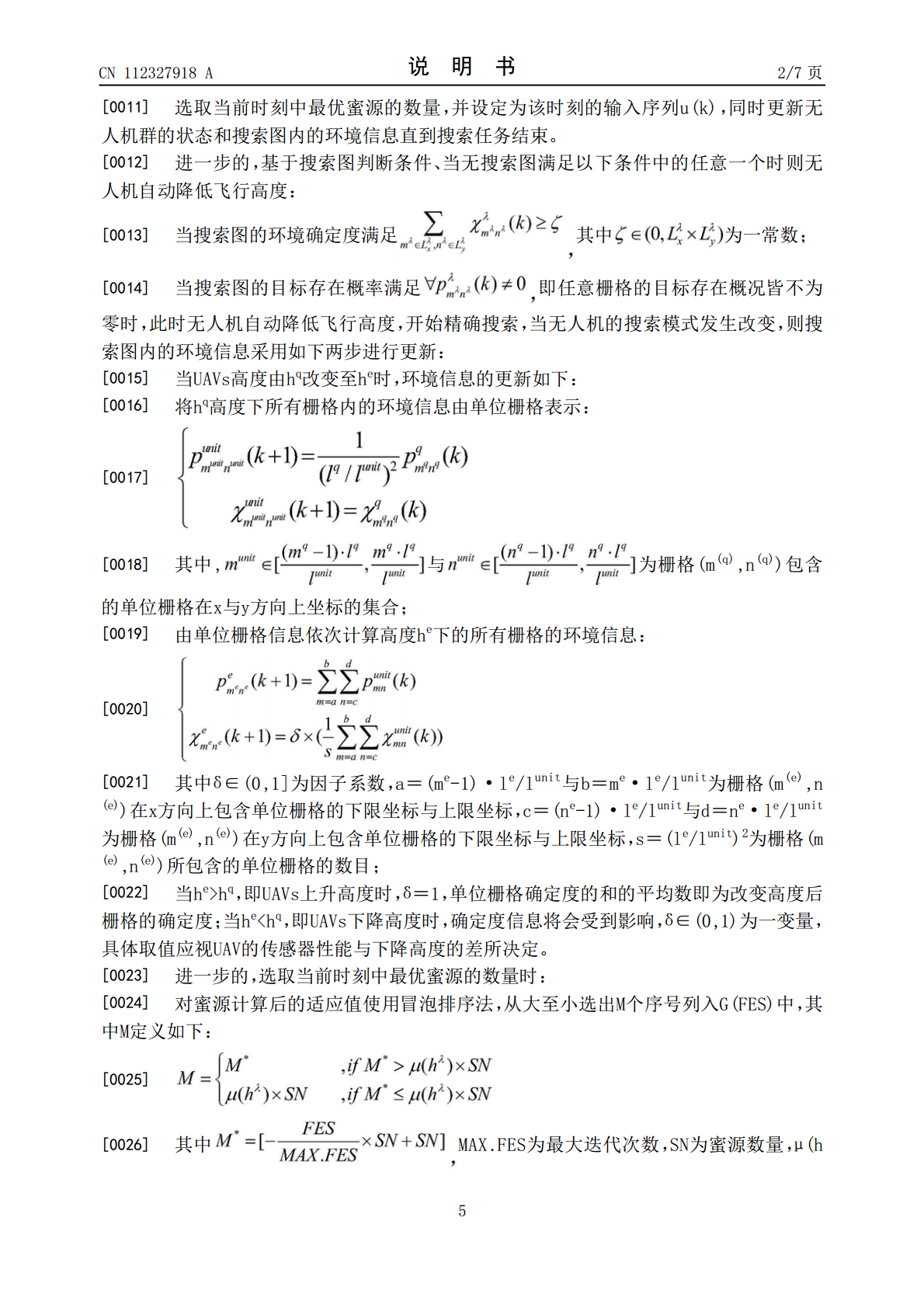
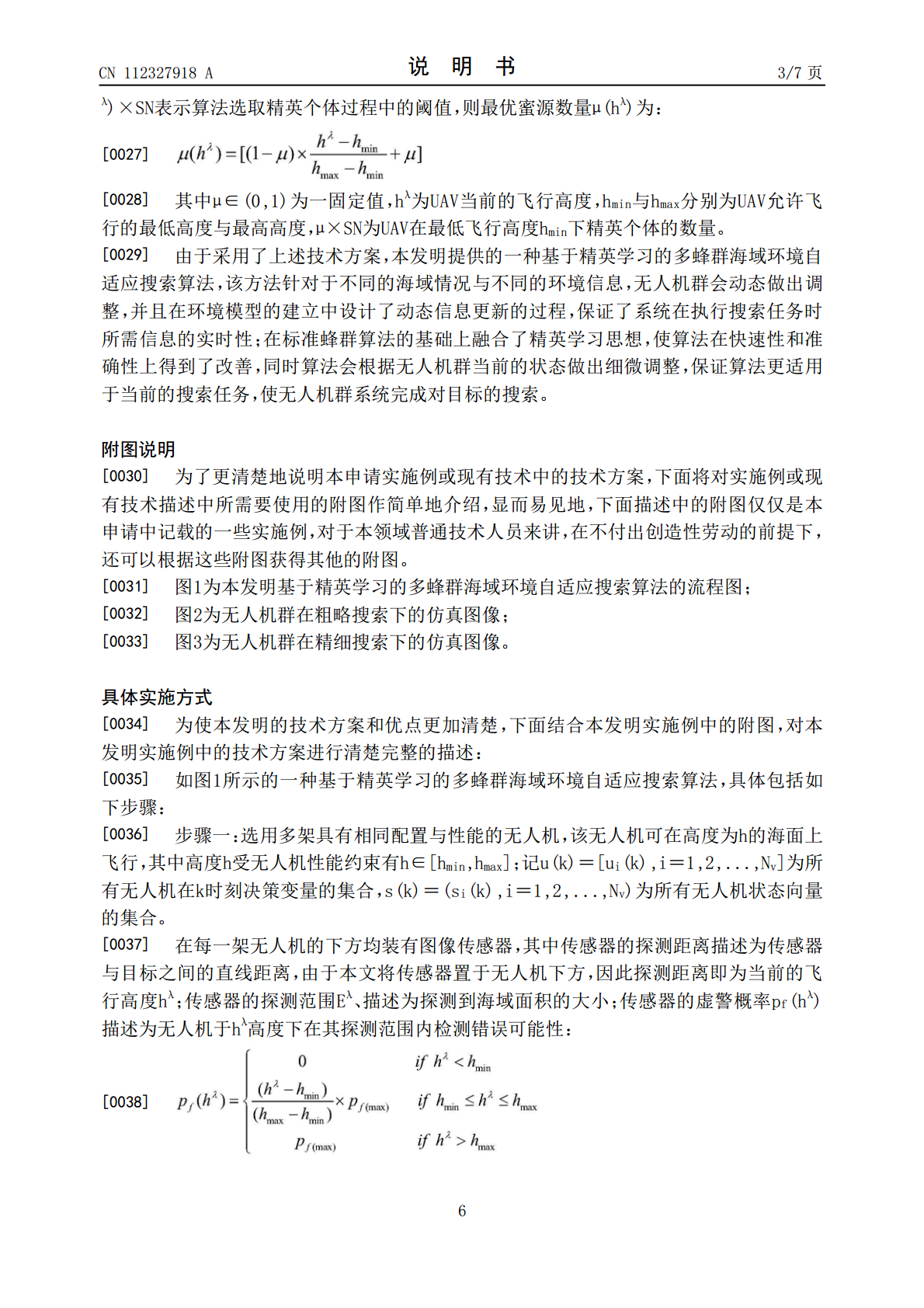
本发明公开了一种基于精英学习的多蜂群海域环境自适应搜索算法,包括:获取多个配置相同的无人机在某时刻的决策变量集合和状态向量集合,将无人机的飞行任务区域栅格化,在环境信息不足的搜索阶段,无人机自动选取一个高于当前飞行高度的区域开始搜索,当满足搜索图判断条件中的任意一个时则无人机自动降低飞行高度、开始精确搜索;当无人机的搜索模式、飞行高度发生改变时,对搜索图内的环境信息采用信息更新方法进行自主更新;采用基于精英学习的多蜂群算法对于无人机的效能函数进行优化求解,选取当前时刻中最优的蜜源,并设定为该时刻的输入序列

基于自适应分类的学习搜索算法.docx
基于自适应分类的学习搜索算法基于自适应分类的学习搜索算法摘要:自适应分类是一种结合了机器学习和搜索算法的方法,旨在根据不同的应用场景和问题自动调整分类器的参数以提高分类的性能。本论文将介绍一种基于自适应分类的学习搜索算法。首先介绍了自适应分类的基本原理和相关的工作。然后详细阐述了学习搜索算法的设计和实现。最后通过实验对比了该算法与其他经典算法的性能,并分析了实验结果。实验结果表明,该算法在各种应用场景中具有较好的分类性能和鲁棒性。关键词:自适应分类,学习搜索算法,性能优化,机器学习1.引言随着信息时代的快

基于多精英单纯形和双种群综合学习的人工蜂群算法.docx
基于多精英单纯形和双种群综合学习的人工蜂群算法基于多精英单纯形和双种群综合学习的人工蜂群算法摘要:人工蜂群算法是一种基于自然界中蜜蜂群体求解问题的启发式优化算法。然而,传统的人工蜂群算法在处理复杂问题时,容易陷入局部最优解,求解效果不佳。为了克服这一问题,本文提出了基于多精英单纯形和双种群综合学习的人工蜂群算法。首先,介绍了传统人工蜂群算法的基本原理和流程。然后,针对该算法的不足之处,提出了多精英单纯形算法的改进方法。多精英单纯形算法引入了多个精英蜜蜂,并对他们进行交叉和变异操作,以增加算法的搜索能力和收

基于精英蜂群搜索策略的人工蜂群算法.docx
基于精英蜂群搜索策略的人工蜂群算法基于精英蜂群搜索策略的人工蜂群算法引言:人工蜂群算法(ArtificialBeeColony,ABC)是一种基于蜜蜂觅食行为的启发式优化算法,模拟了蜜蜂在寻找最优食物源时的搜索行为。ABC算法是一种全局优化算法,具有简单、易实现以及快速收敛等优点,在解决复杂优化问题方面具有广泛的应用潜力。然而,传统的ABC算法存在收敛速度慢、易陷入局部最优等问题。本文将引入基于精英蜂群搜索策略的ABC算法,以期进一步提高搜索性能和收敛速度。1.ABC算法简介ABC算法是由Karaboga

基于精英反向学习的混沌布谷鸟搜索算法.docx
基于精英反向学习的混沌布谷鸟搜索算法混沌布谷鸟搜索算法是一种基于基因算法(GA,GeneticAlgorithm)和精英反向学习(EL,ElitistLearning)的优化算法。该算法采用了混沌搜索和布谷鸟觅食行为的启发式策略,同时利用了精英反向学习的思想来提高算法的局部搜索能力和全局搜索能力。在本文中,我们将详细介绍混沌布谷鸟搜索算法的原理、流程以及应用领域,并通过对比实验来评估其性能和优点。混沌布谷鸟搜索算法的基本原理是模拟布谷鸟觅食的行为。布谷鸟是一种生活在东南亚地区的鸟类,其觅食行为具有很高的搜