
基于改进人工蜂群算法的无人机编队拓扑生成优化方法.pdf

努力****弘毅


1/10

2/10
3/10

4/10
5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共32页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于改进人工蜂群算法的无人机编队拓扑生成优化方法.pdf
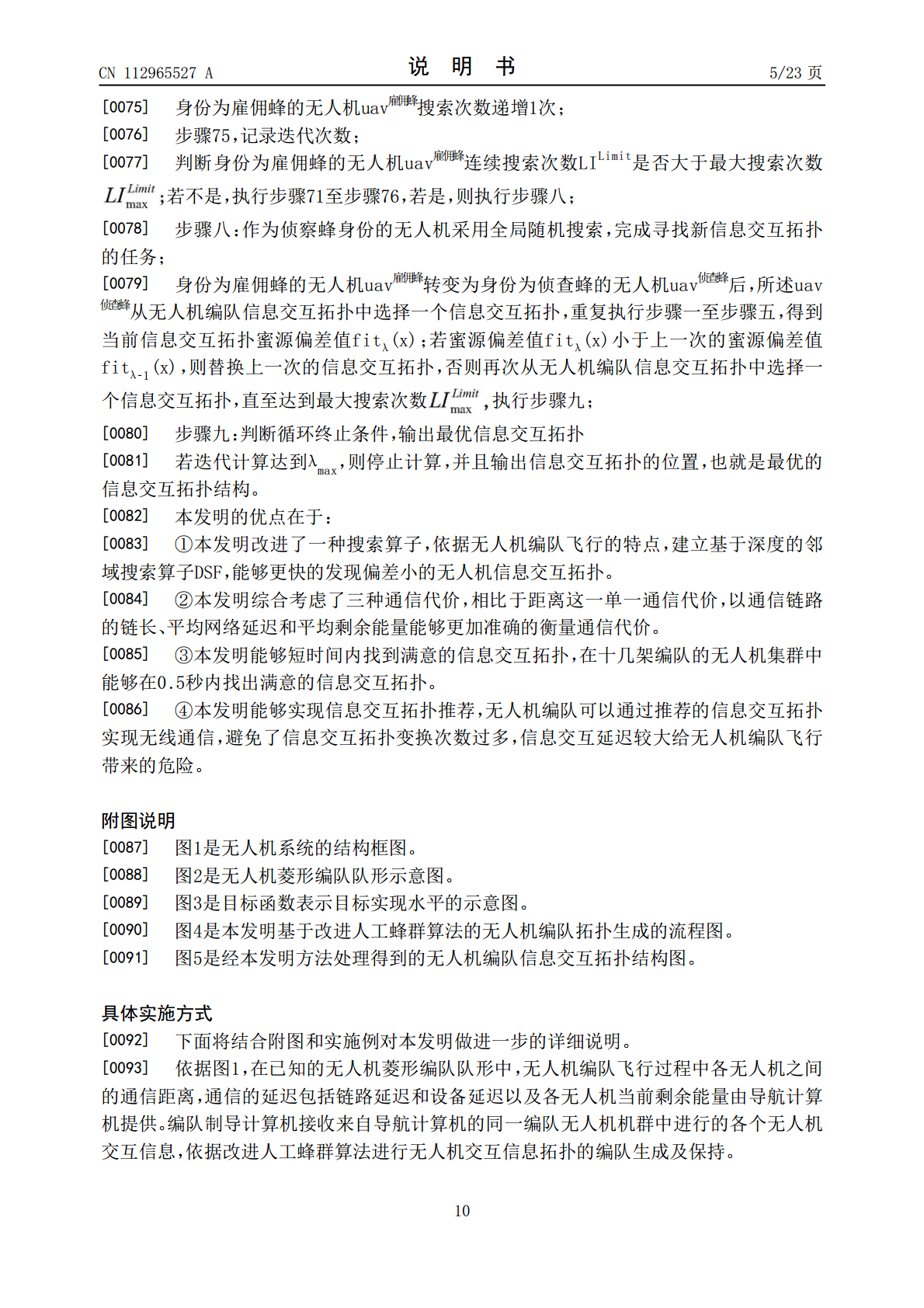
本发明公开了一种基于改进人工蜂群算法的无人机编队多目标信息交互拓扑优化方法,依据无人机菱形编队中多目标规划建立链长、平均网络延迟和平均剩余能量;然后设定各个目标的隶属函数,并将隶属函数转化为统一的偏差值;采用深度邻域搜索算子DSF修正依据人工蜂群算法构建的无人机编队,得到能够更加高效的寻求偏差最小的无人机编队生成信息交互拓扑。本发明能够满足不同无人机编队信息交互拓扑生成的要求,在节省无人机能量的同时,降低无人机编队的通信延迟,并且使编队的能量分布更加均匀。对无人机编队快速生成信息交互拓扑具有重要意义。

基于人工蜂群算法的多无人机三维编队重构方法.pdf
本发明公开了一种基于人工蜂群算法的多无人机三维编队重构方法,属于无人机控制技术领域。所述方法首先建立无人机的运动模型,然后给出三维编队重构最优时间控制的数学描述;进行分段线性化控制输入后,采用ABC算法进行无人机三维编队重构。相比于现有技术,本发明通过ABC算法搜索到无人机编队重构的时间最短,实现无人机编队重构的快速性;ABC算法是全局搜索方法,可以避免陷入局部最优,使得无人机编队重构的精度上升。
一种基于改进人工蜂鸟算法的无人机编队阵型优化方法.pdf
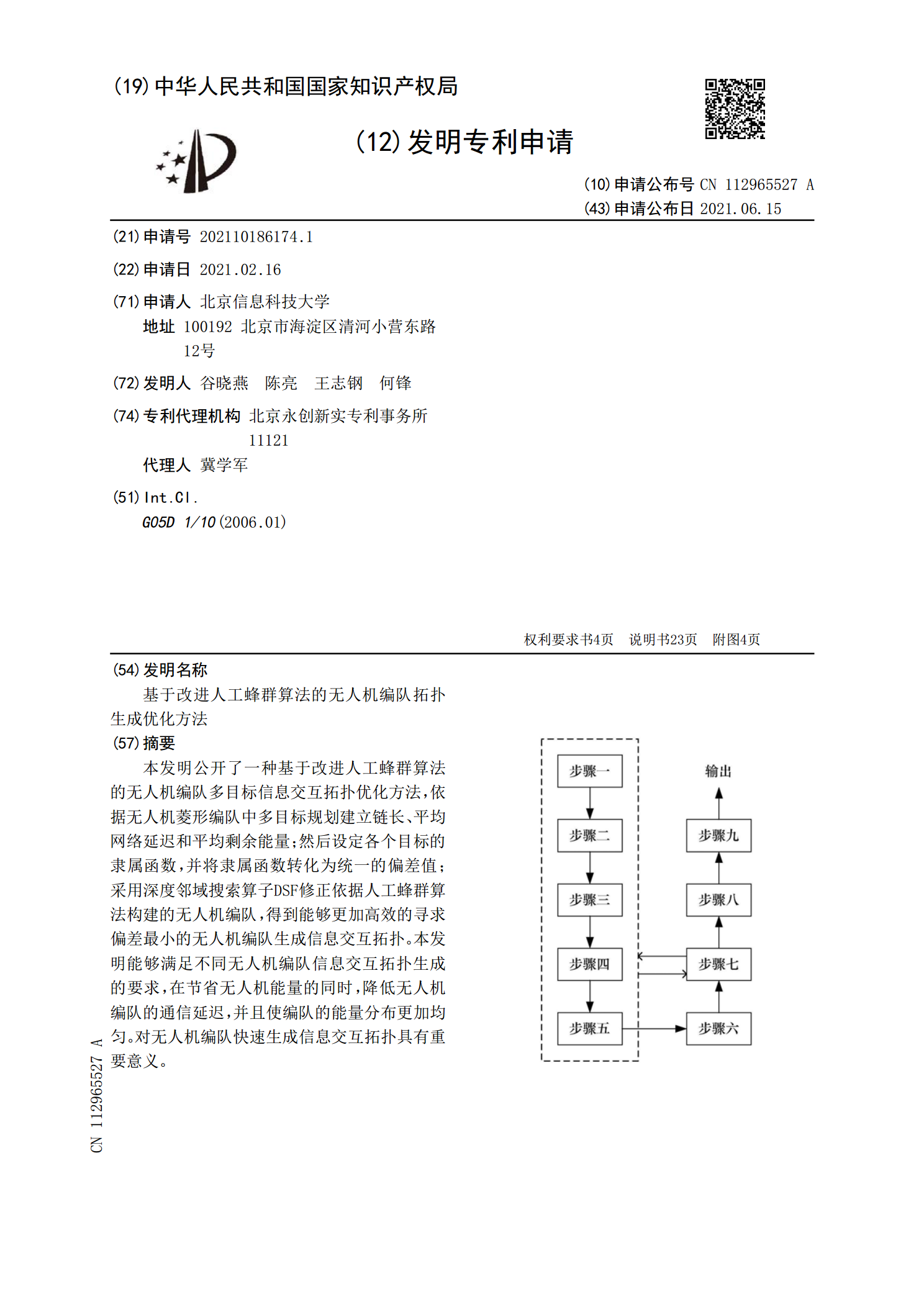
本发明公开了一种基于改进人工蜂鸟算法的无人机编队阵型优化方法,包括以下步骤:S1、利用多无人机编队对目标进行无源定位,得到目标的初步坐标估计结果;S2、利用目标初步坐标估计结果,计算该目标位置的GDOP值,根据GDOP值划定观测区域,并在观测区域内选取K个离散的点构造优化目标函数;S3、对人工蜂鸟算法进行改进;S4、利用改进后的人工蜂鸟算法对优化目标函数进行求解,得到无人机编队阵型。本发明具有运算速度快、求解精度高、收敛性能好、适应性强等优点,可以快速、高性能地对无人机编队的阵型进行优化。
基于改进人工蜂群算法的车间设施布局优化方法.pdf
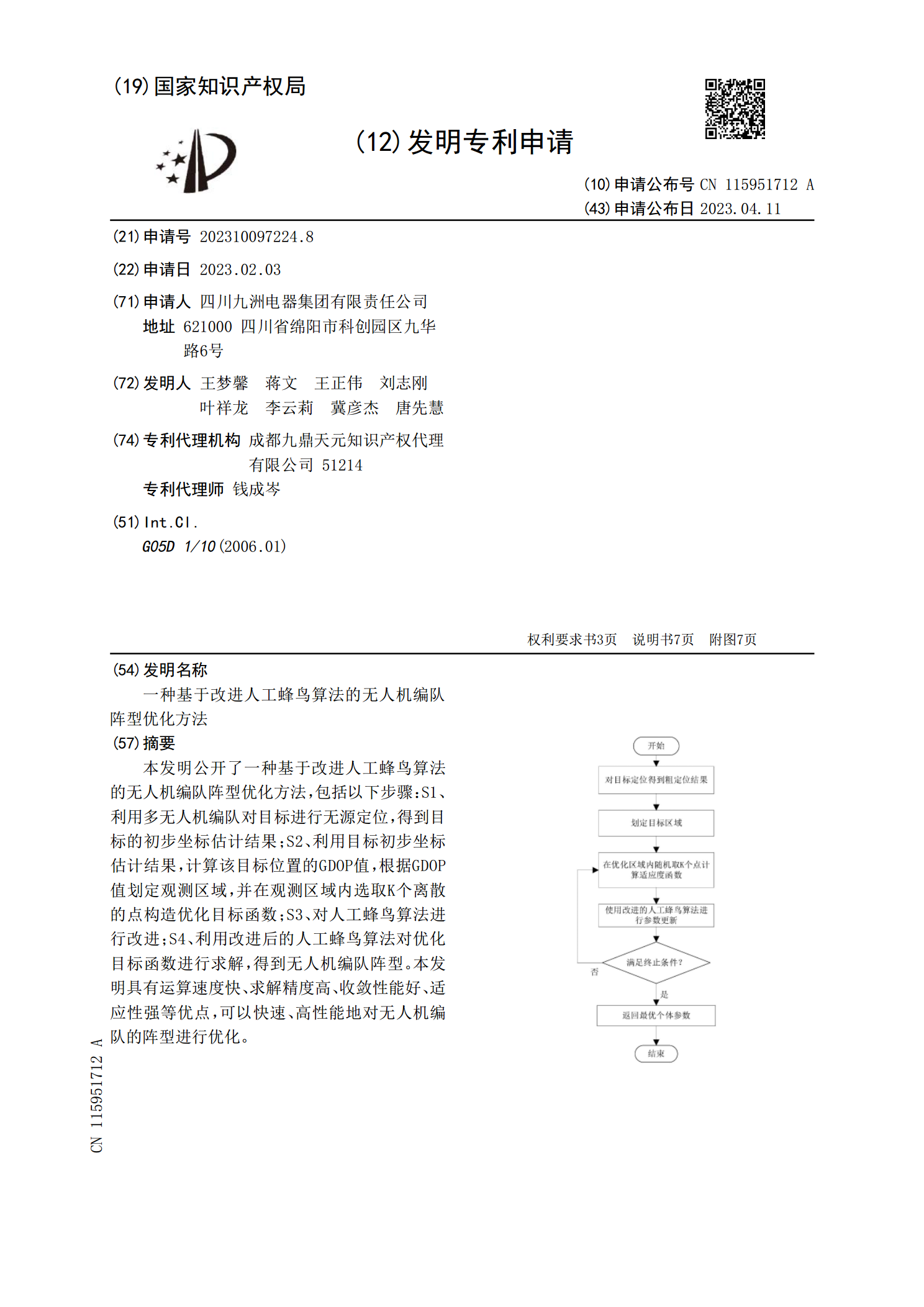
本发明公开了一种基于人工蜂群算法的车间设施布局优化方法,该优化方法以车间内单元间总物流矩为优化目标,建立数学模型和约束条件;对基本人工蜂群算法进行离散化处理,采用基于随机搜索的局部搜索方法,并融合次序交叉操作和锦标赛选择机制。通过仿真实验证明,本发明的优化方法能够在较短时间内得到全局最优解,减少了加工单元之间的搬运费用,从而实现对车间设施布局的最优化设计。
基于预测模型滚动优化的无人机蜂群编队队形控制方法.pdf
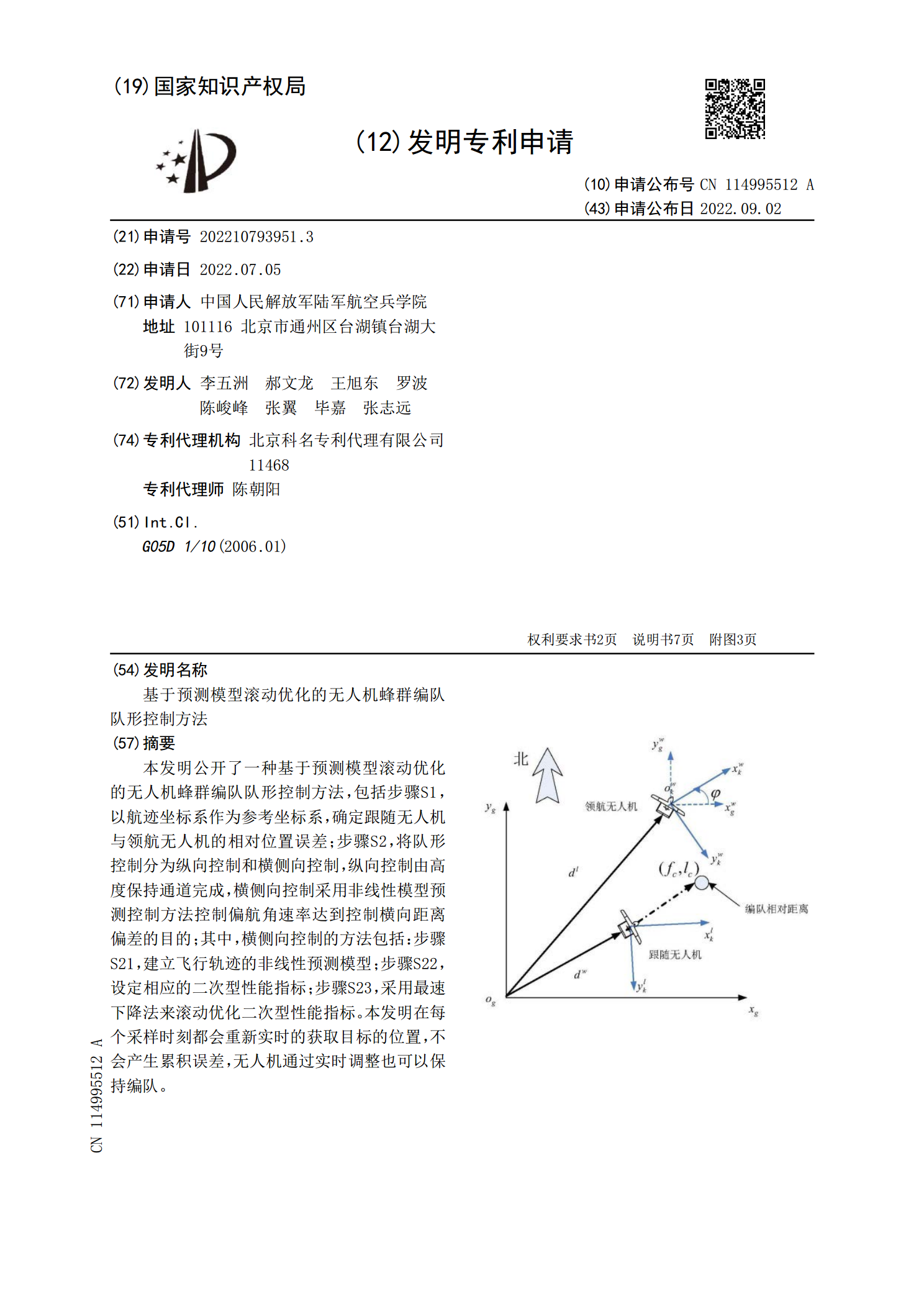
本发明公开了一种基于预测模型滚动优化的无人机蜂群编队队形控制方法,包括步骤S1,以航迹坐标系作为参考坐标系,确定跟随无人机与领航无人机的相对位置误差;步骤S2,将队形控制分为纵向控制和横侧向控制,纵向控制由高度保持通道完成,横侧向控制采用非线性模型预测控制方法控制偏航角速率达到控制横向距离偏差的目的;其中,横侧向控制的方法包括:步骤S21,建立飞行轨迹的非线性预测模型;步骤S22,设定相应的二次型性能指标;步骤S23,采用最速下降法来滚动优化二次型性能指标。本发明在每个采样时刻都会重新实时的获取目标的位置