
一种非合作目标翻滚运动起旋模拟系统及方法.pdf

是你****辉呀

1/10
2/10
3/10
4/10
5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种非合作目标翻滚运动起旋模拟系统及方法.pdf
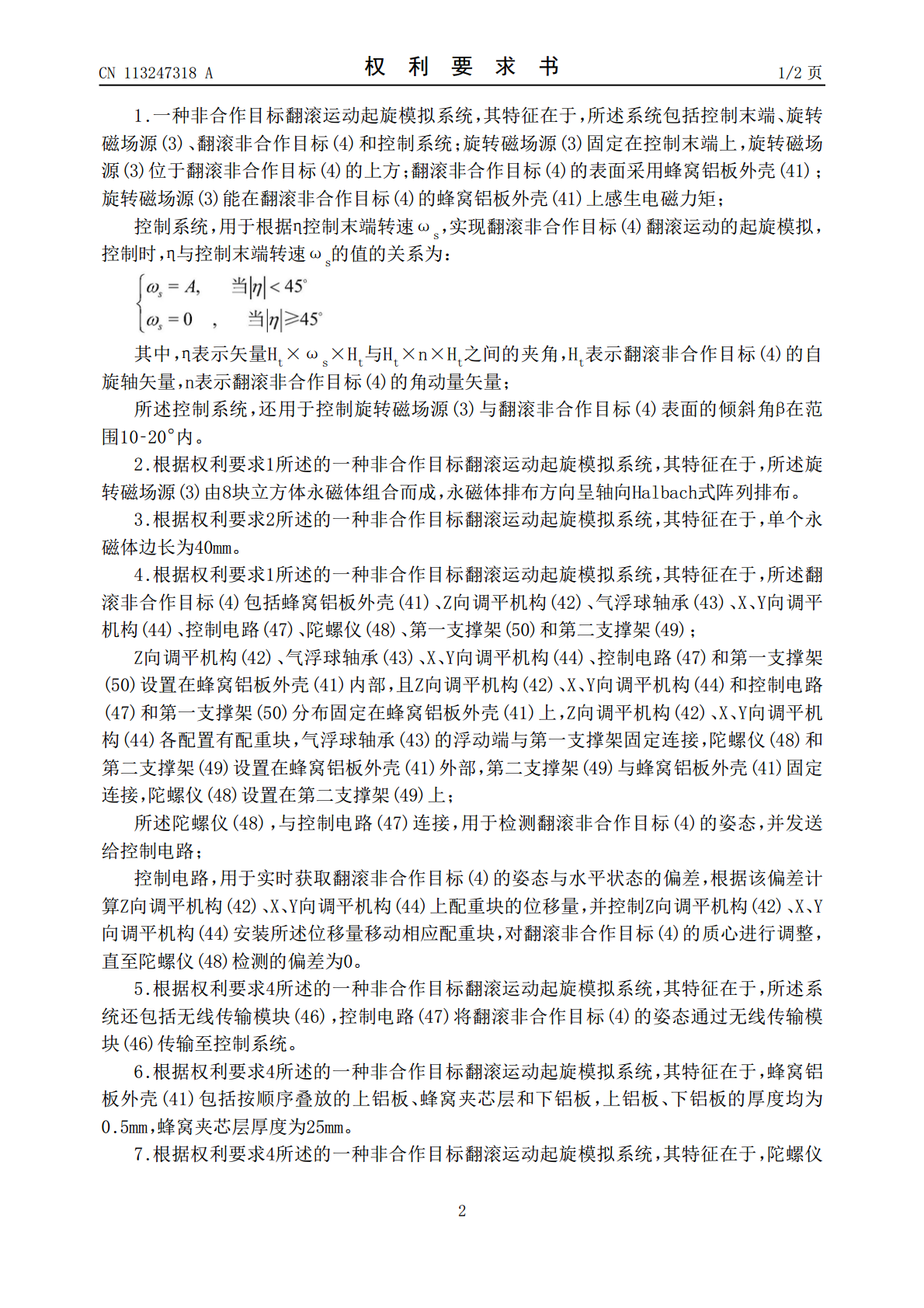
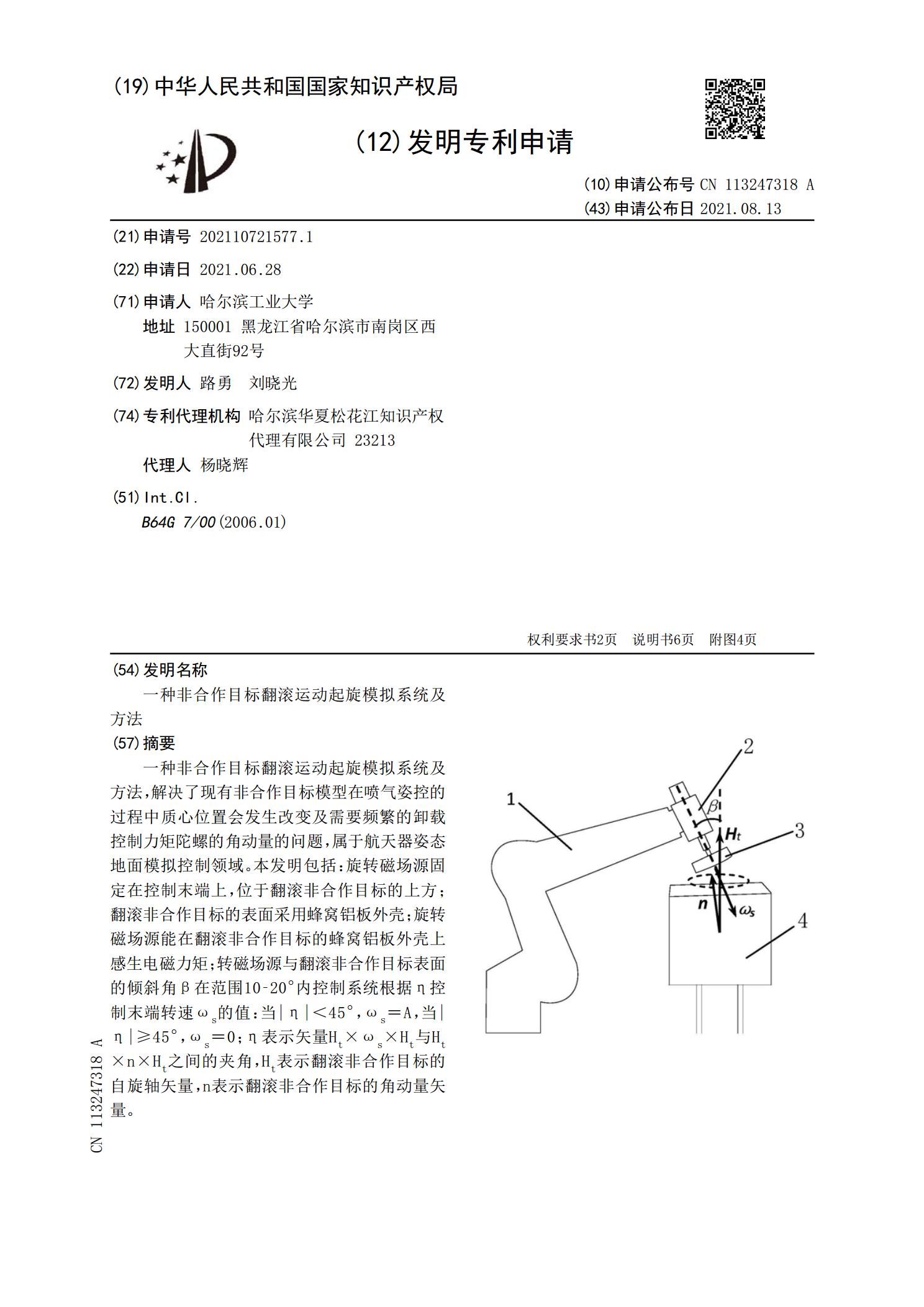
一种非合作目标翻滚运动起旋模拟系统及方法,解决了现有非合作目标模型在喷气姿控的过程中质心位置会发生改变及需要频繁的卸载控制力矩陀螺的角动量的问题,属于航天器姿态地面模拟控制领域。本发明包括:旋转磁场源固定在控制末端上,位于翻滚非合作目标的上方;翻滚非合作目标的表面采用蜂窝铝板外壳;旋转磁场源能在翻滚非合作目标的蜂窝铝板外壳上感生电磁力矩;转磁场源与翻滚非合作目标表面的倾斜角β在范围10‑20°内控制系统根据η控制末端转速ω

一种基于双星电磁编队卫星的空间翻滚目标非接触消旋方法.pdf
本发明公开了一种基于双星电磁编队卫星的空间翻滚目标非接触消旋方法。该方法利用两个搭载高温超导线圈的小卫星组成电磁编队,到达非合作目标两侧,营造包络目标的空间可控磁场;通过控制星载线圈电流的大小和方向及编队卫星的姿态,实现两个服务卫星不断的靠近、远离目标。利用目标上的导体相对线圈磁场运动而感应的涡流力矩实现目标和线圈系统的非接触电磁作用,吸收目标的角动量,并在最远点利用推进剂消耗服务卫星系统的角动量。本发明为了解决非合作目标复杂的翻滚运动而难以实施捕获的问题。

一种失效翻滚卫星非接触消旋的安全鲁棒预测控制方法.pdf
本发明涉及一种失效翻滚卫星非接触消旋的安全鲁棒预测控制方法,采用了反馈线性化方法获得了系统的线性化模型,相比直接对非线性系统方程设计模型预测控制器,该方法可以大大降低计算量。使用了鲁棒模型预测控制算法设计控制输入,可以保证非接触消旋过程中,服务航天器一直处于安全约束内,且设计了二次型目标代价函数,保证了燃料消耗的最优性。
一种非合作弹道飞行目标运动状态分析方法及系统.pdf
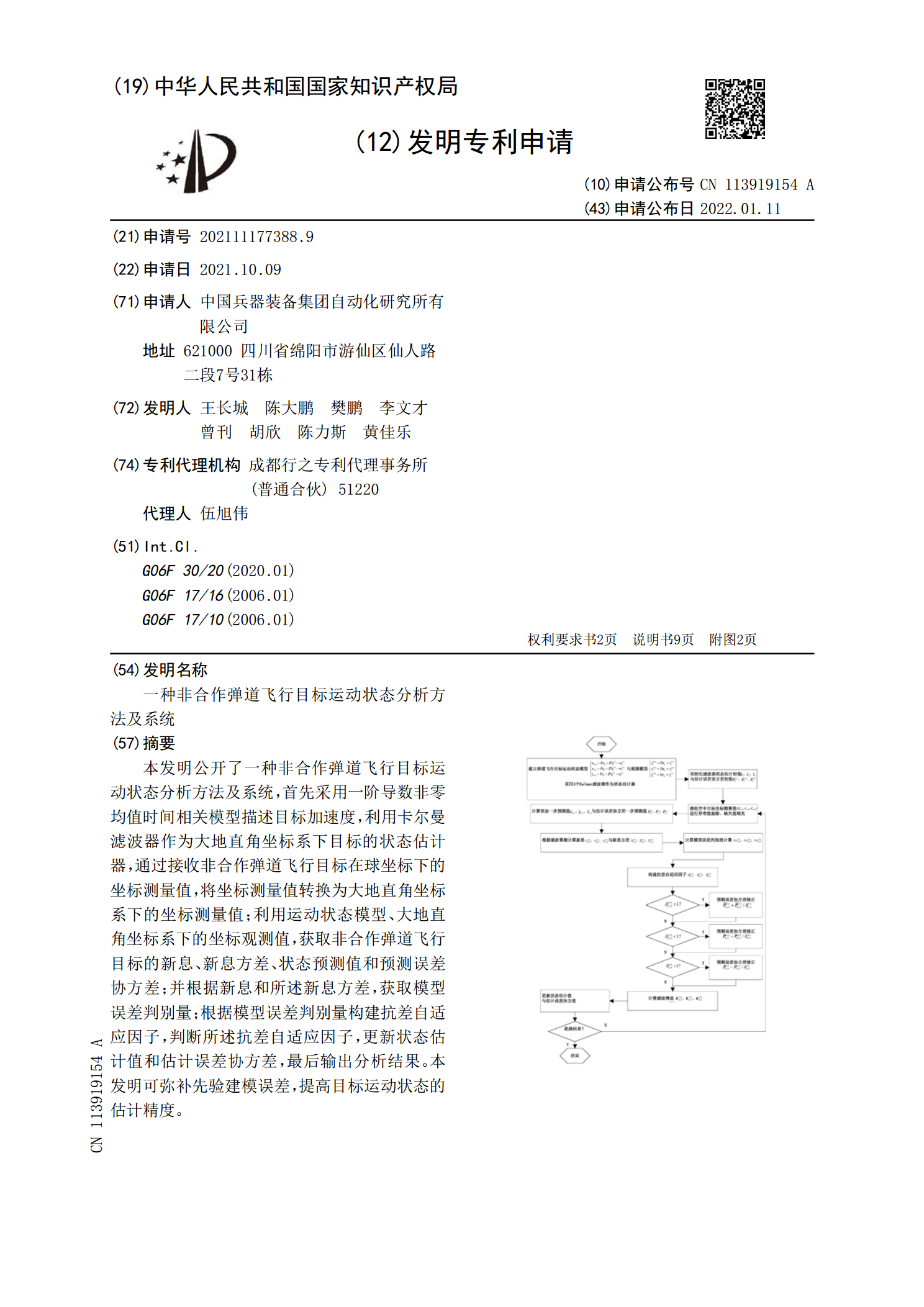
本发明公开了一种非合作弹道飞行目标运动状态分析方法及系统,首先采用一阶导数非零均值时间相关模型描述目标加速度,利用卡尔曼滤波器作为大地直角坐标系下目标的状态估计器,通过接收非合作弹道飞行目标在球坐标下的坐标测量值,将坐标测量值转换为大地直角坐标系下的坐标测量值;利用运动状态模型、大地直角坐标系下的坐标观测值,获取非合作弹道飞行目标的新息、新息方差、状态预测值和预测误差协方差;并根据新息和所述新息方差,获取模型误差判别量;根据模型误差判别量构建抗差自适应因子,判断所述抗差自适应因子,更新状态估计值和估计误差

一种旋翼桨叶结冰准非定常数值模拟方法和系统.pdf
本发明提供一种旋翼桨叶结冰准非定常数值模拟方法和系统,其中方法包括生成旋翼桨叶网格和背景网格;将总结冰时间均匀划分为多个结冰时间步;将旋翼的运动周期均匀划分为多个物理时间步;计算当前物理时间步的非定常流场;计算当前物理时间步的水滴场;计算每个结冰时间步的结冰计算周期总数;计算每个结冰时间;计算每个结冰时间步内结冰计算的次数;更新结冰后的旋翼桨叶网格;完成所有数量次结冰时间步,得到总结冰时间内旋翼桨叶结冰后的冰形结果。本发明保留旋翼运动过程中流场、水滴场和结冰的非定常特性,适用于直升机在悬停、前飞状态下的旋