
基于改进人工蜂群算法的动态多目标柔性作业车间调度方法.pdf

俊英****22

1/10
2/10

3/10

4/10

5/10
6/10

7/10
8/10
9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于改进人工蜂群算法的动态多目标柔性作业车间调度方法.pdf
本发明公开了一种基于改进人工蜂群算法的动态多目标柔性作业车间调度方法,在传统的生产调度目标基础上,将碳排放纳入调度系统,建立以最大完成时间、碳排放和稳定性为目标的问题模型;考虑到动态事件需要生产车间具有快速地响应能力,采用基于事件驱动的重调度策略;种群的初始化采用多种启发式规则产生优质的初始解降低算法搜索范围,针对碳排放目标提出一种启发式的低碳机器变异策略。本发明用于解决动态多目标柔性作业车间调度中出现的机器故障、订单取消和紧急订单插入等动态事件,能够快速响应动态事件,维持车间稳定高效的运行。
基于改进人工蜂群算法的柔性作业车间调度方法.pdf
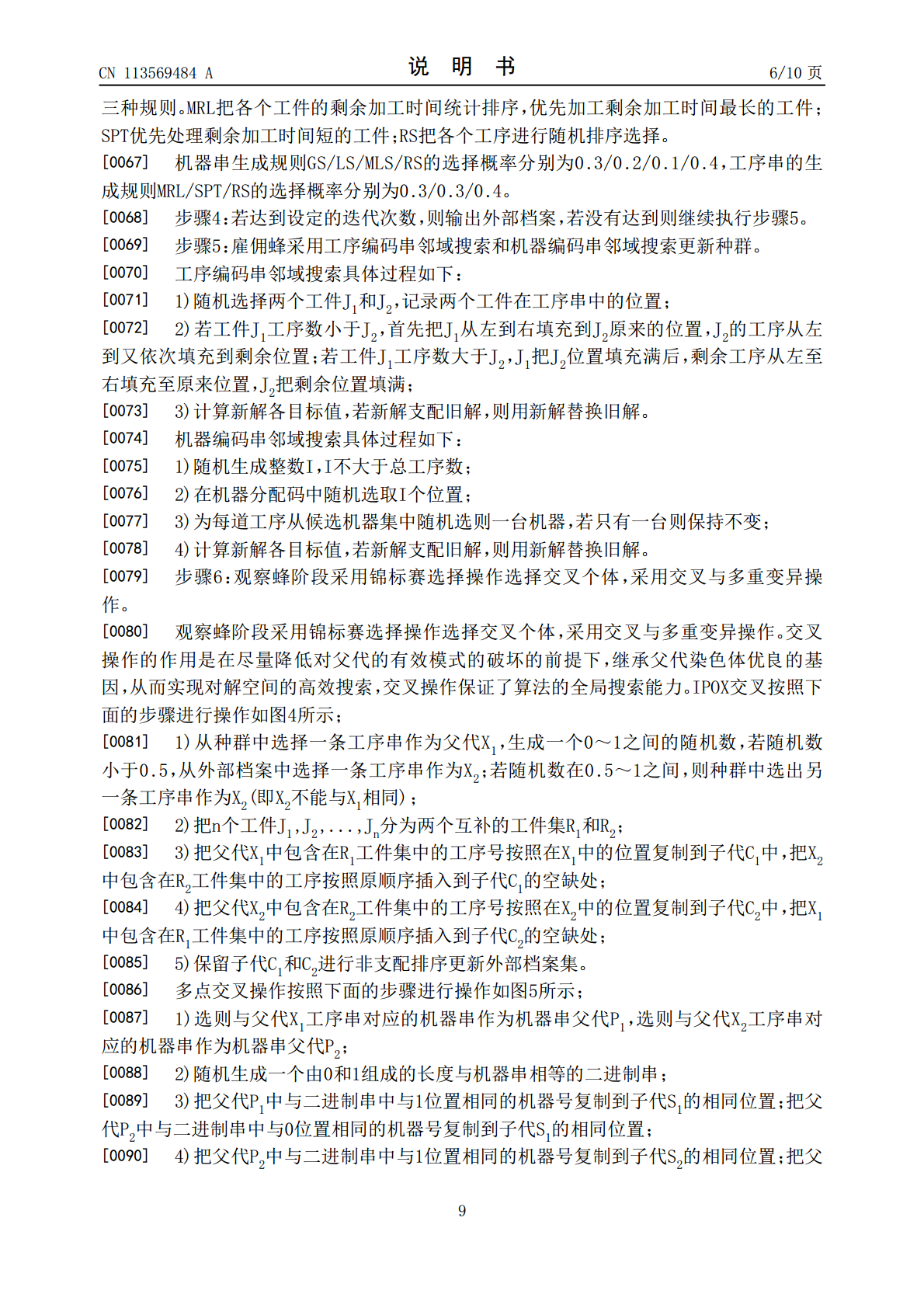
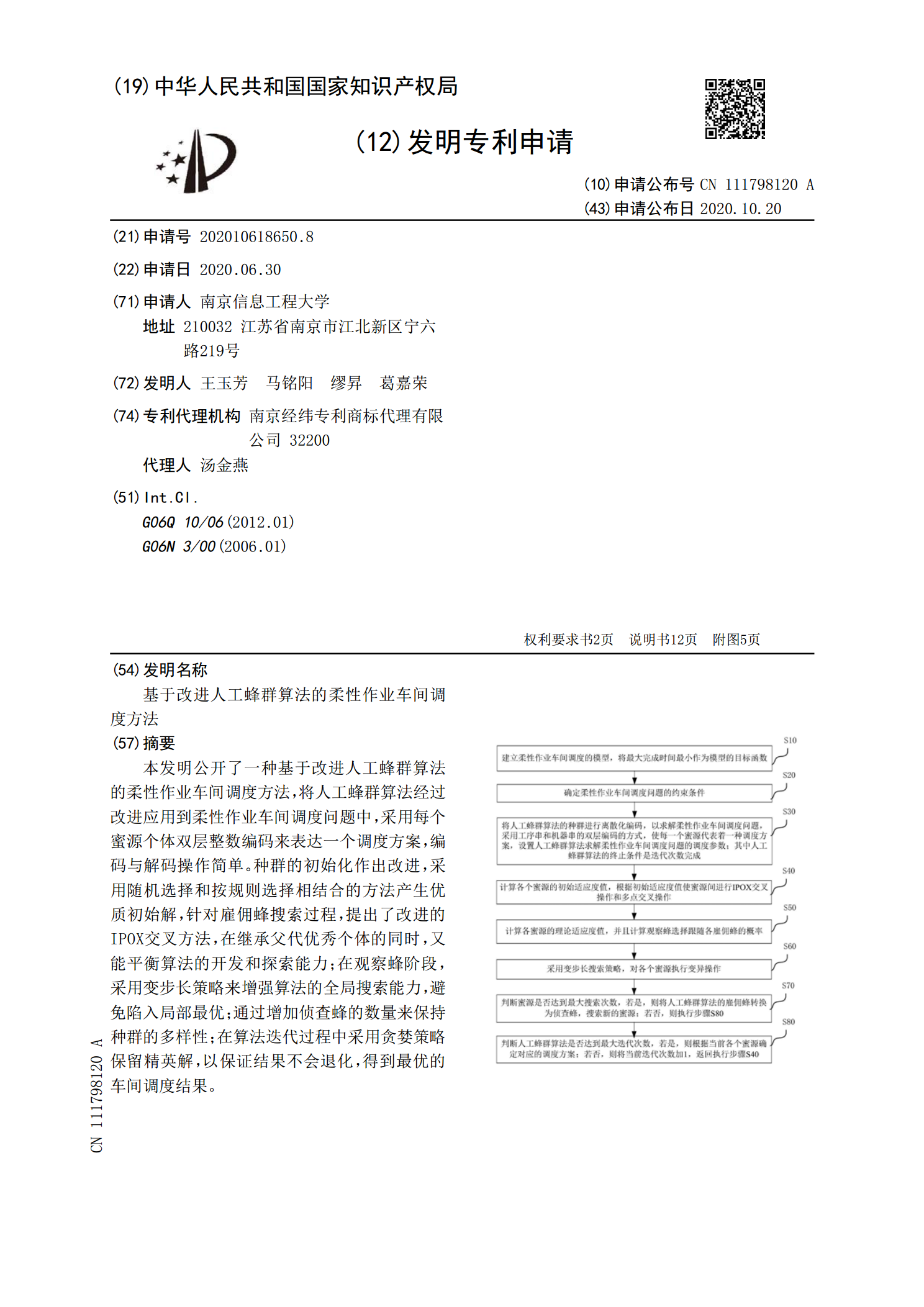
本发明公开了一种基于改进人工蜂群算法的柔性作业车间调度方法,将人工蜂群算法经过改进应用到柔性作业车间调度问题中,采用每个蜜源个体双层整数编码来表达一个调度方案,编码与解码操作简单。种群的初始化作出改进,采用随机选择和按规则选择相结合的方法产生优质初始解,针对雇佣蜂搜索过程,提出了改进的IPOX交叉方法,在继承父代优秀个体的同时,又能平衡算法的开发和探索能力;在观察蜂阶段,采用变步长策略来增强算法的全局搜索能力,避免陷入局部最优;通过增加侦查蜂的数量来保持种群的多样性;在算法迭代过程中采用贪婪策略保留精英解

基于改进人工蜂群算法的多目标绿色柔性作业车间调度研究.docx
基于改进人工蜂群算法的多目标绿色柔性作业车间调度研究摘要:本文提出了一种基于改进人工蜂群算法的多目标绿色柔性作业车间调度方法。通过分析大规模车间的复杂调度问题,提出了挑选适宜机器进行柔性制造,减少工艺配置、机器更换和工人训练等成本的绿色柔性作业车间调度模型。同时,改进人工蜂群算法,引入动态权重及局部搜索策略,减少算法陷入局部最优解的可能性,使得算法具有更好的全局搜索性能。实验结果表明该方法在处理多目标调度问题上具有较好的优化效果。关键词:绿色柔性制造;车间调度;人工蜂群算法;动态权重;局部搜索Abstra

基于混合人工蜂群算法的多目标柔性作业车间调度问题研究.docx
基于混合人工蜂群算法的多目标柔性作业车间调度问题研究标题:基于混合人工蜂群算法的多目标柔性作业车间调度问题研究摘要:柔性作业车间调度问题(FJSSP)作为一类复杂的组合优化问题,在实际生产中具有重要应用价值。本文针对FJSSP问题,提出了一种基于混合人工蜂群算法(HABC)的求解方法,通过蜜蜂的信息传递和计算,实现了高效率和高质量的调度方案。针对FJSSP问题的多个目标,包括最小化完工时间、最小化机器利用率和最小化工序返工次数,利用混合人工蜂群算法进行求解,为决策者提供了多种调度方案选择。关键词:柔性作业

基于混合人工蜂群算法的多目标柔性作业车间调度问题研究.pptx
基于混合人工蜂群算法的多目标柔性作业车间调度问题研究目录添加目录项标题混合人工蜂群算法概述人工蜂群算法原理混合人工蜂群算法的提出混合人工蜂群算法的优势多目标柔性作业车间调度问题描述作业车间调度问题定义多目标柔性作业车间调度的特点多目标柔性作业车间调度问题的求解难点基于混合人工蜂群算法的多目标柔性作业车间调度模型建立模型的目标函数确定模型的约束条件设置模型的求解流程设计混合人工蜂群算法在多目标柔性作业车间调度中的应用算法参数设置算法实现过程算法性能评估实验验证与结果分析实验环境搭建实验结果展示结果分析结论与