
一种无人机蜂群安全通信方法.pdf

Jo****34

1/10
2/10
3/10
4/10
5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种无人机蜂群安全通信方法.pdf
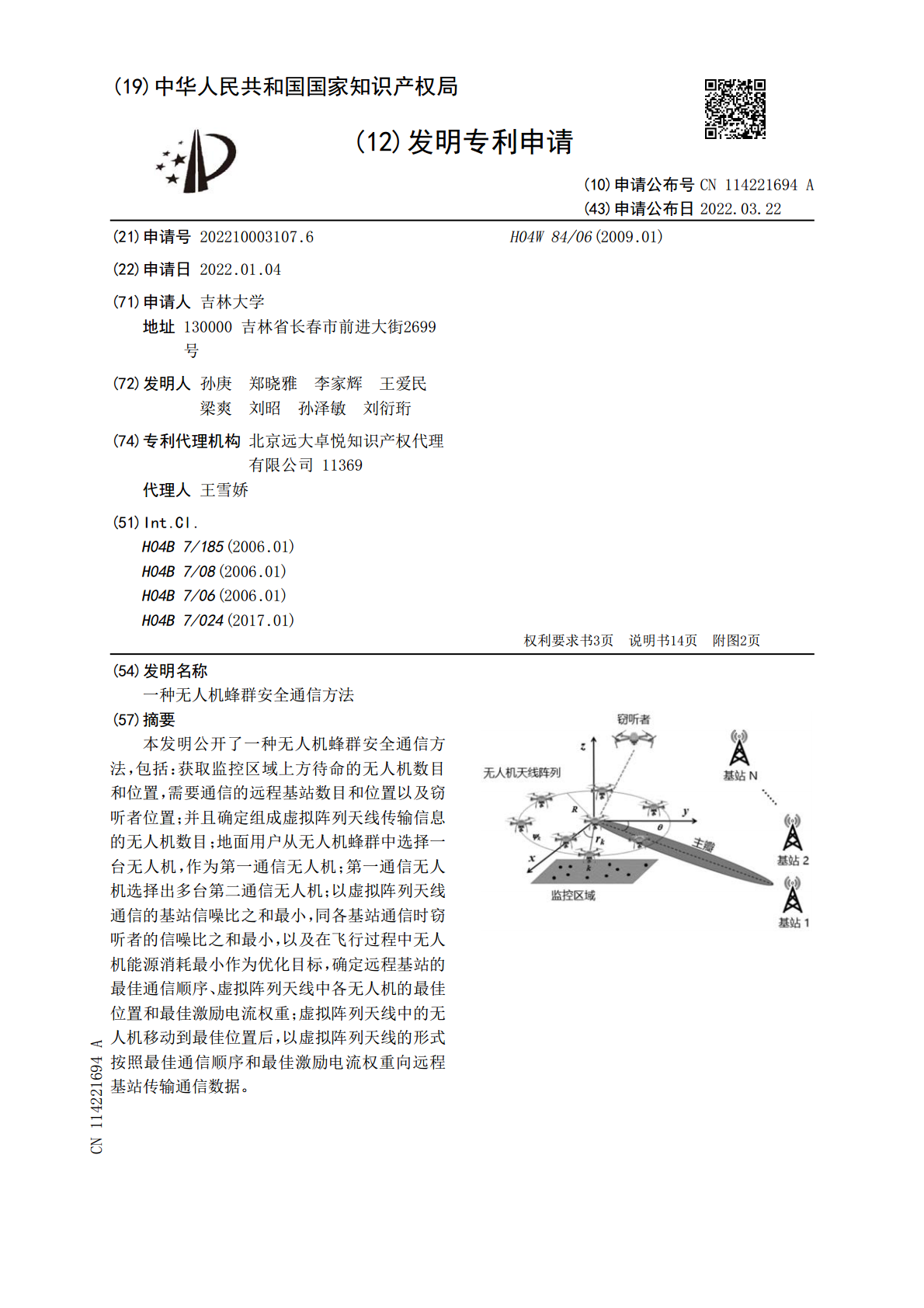
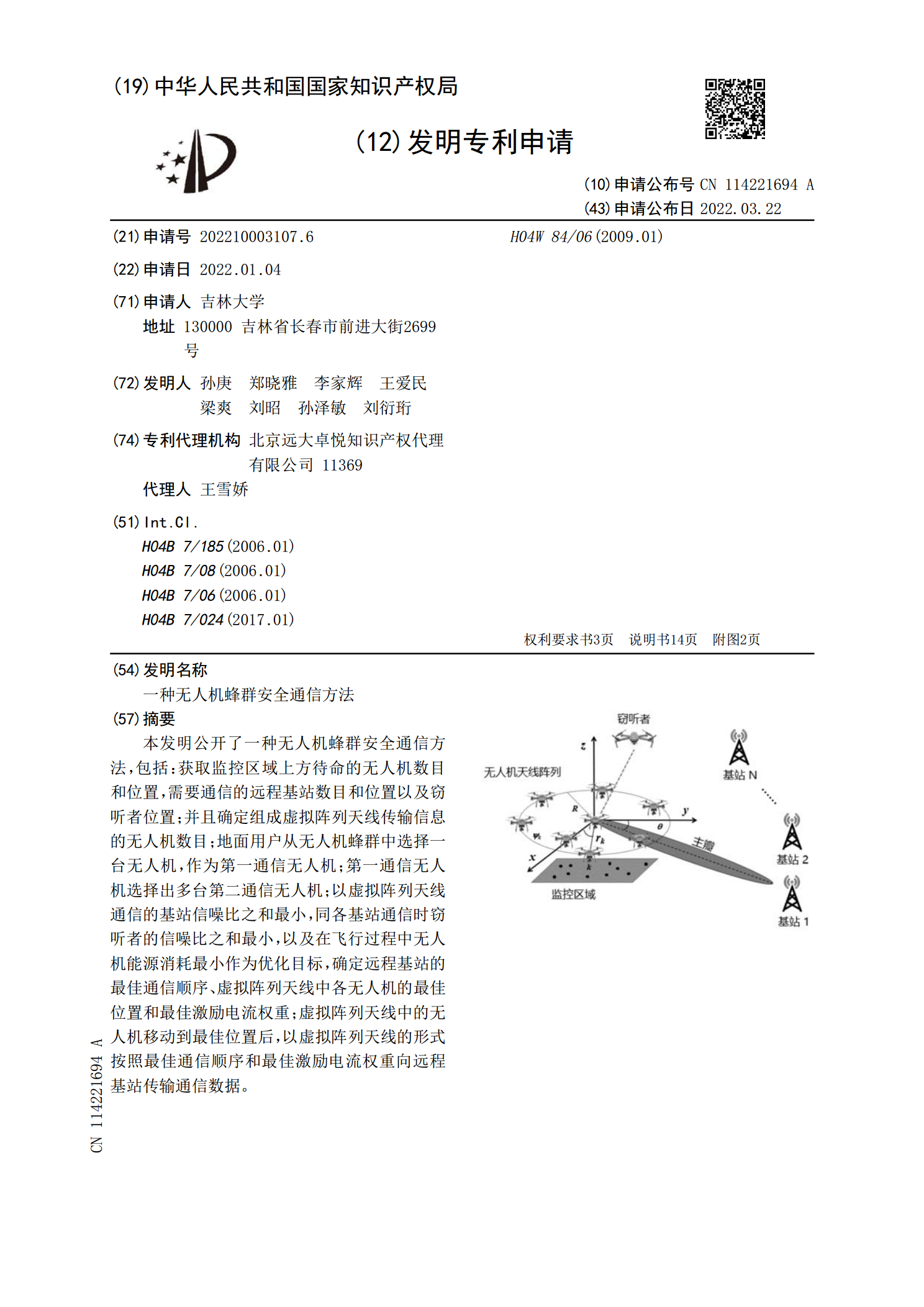
本发明公开了一种无人机蜂群安全通信方法,包括:获取监控区域上方待命的无人机数目和位置,需要通信的远程基站数目和位置以及窃听者位置;并且确定组成虚拟阵列天线传输信息的无人机数目;地面用户从无人机蜂群中选择一台无人机,作为第一通信无人机;第一通信无人机选择出多台第二通信无人机;以虚拟阵列天线通信的基站信噪比之和最小,同各基站通信时窃听者的信噪比之和最小,以及在飞行过程中无人机能源消耗最小作为优化目标,确定远程基站的最佳通信顺序、虚拟阵列天线中各无人机的最佳位置和最佳激励电流权重;虚拟阵列天线中的无人机移动到最
一种基于无人机蜂群的海上保密通信方法.pdf
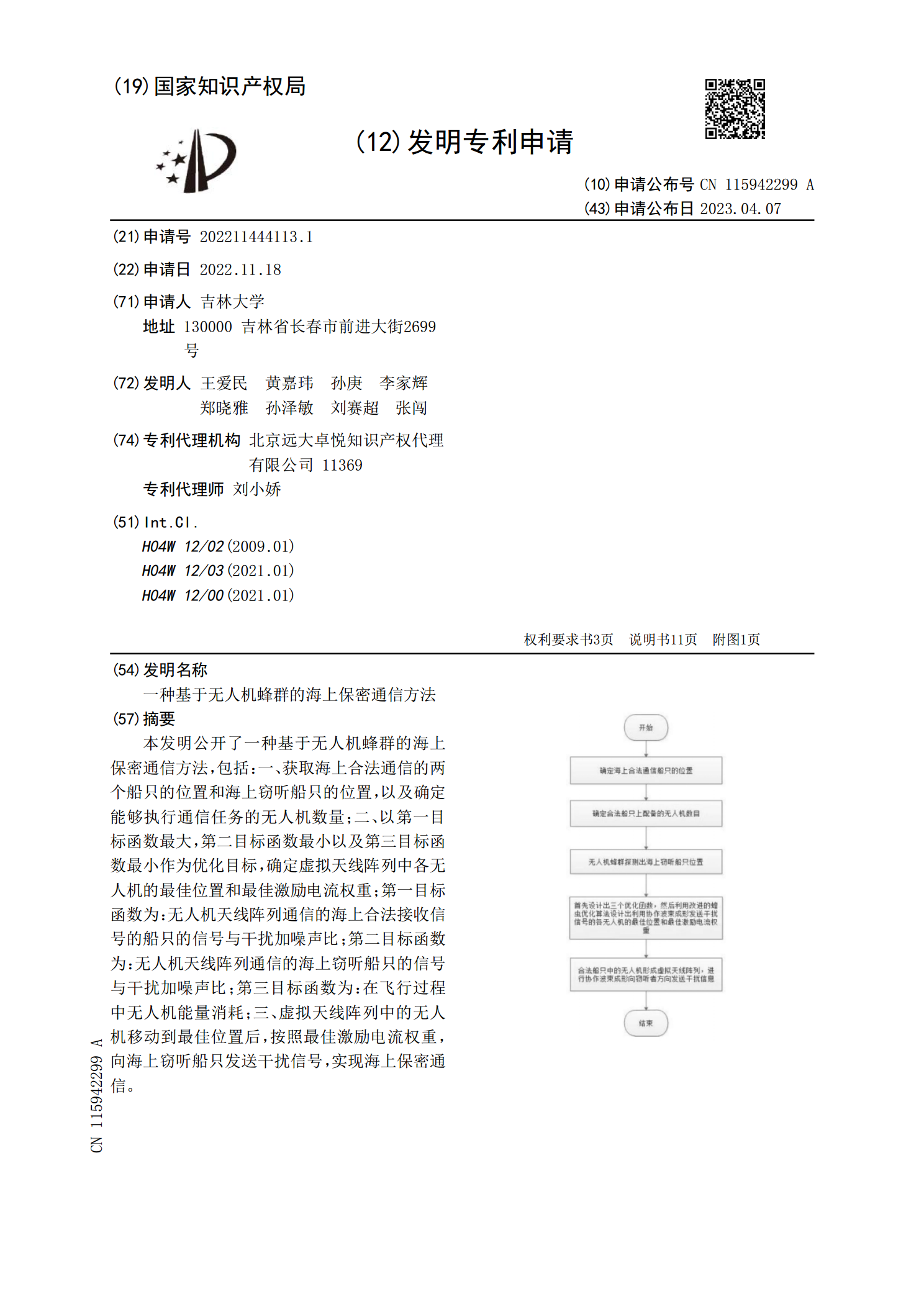
本发明公开了一种基于无人机蜂群的海上保密通信方法,包括:一、获取海上合法通信的两个船只的位置和海上窃听船只的位置,以及确定能够执行通信任务的无人机数量;二、以第一目标函数最大,第二目标函数最小以及第三目标函数最小作为优化目标,确定虚拟天线阵列中各无人机的最佳位置和最佳激励电流权重;第一目标函数为:无人机天线阵列通信的海上合法接收信号的船只的信号与干扰加噪声比;第二目标函数为:无人机天线阵列通信的海上窃听船只的信号与干扰加噪声比;第三目标函数为:在飞行过程中无人机能量消耗;三、虚拟天线阵列中的无人机移动到最
一种无人机蜂群组网测控通信链路及通信方法.pdf
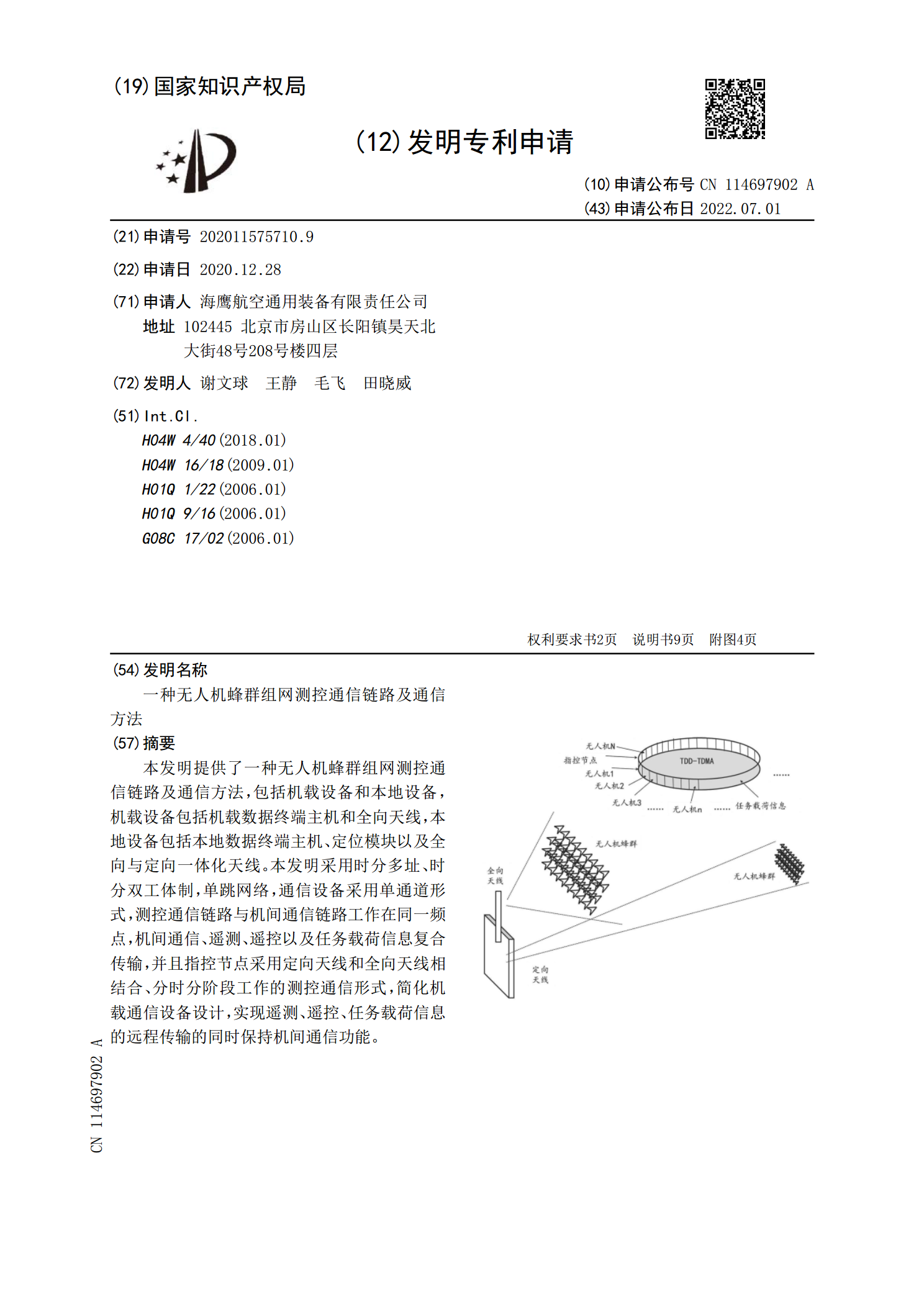
本发明提供了一种无人机蜂群组网测控通信链路及通信方法,包括机载设备和本地设备,机载设备包括机载数据终端主机和全向天线,本地设备包括本地数据终端主机、定位模块以及全向与定向一体化天线。本发明采用时分多址、时分双工体制,单跳网络,通信设备采用单通道形式,测控通信链路与机间通信链路工作在同一频点,机间通信、遥测、遥控以及任务载荷信息复合传输,并且指控节点采用定向天线和全向天线相结合、分时分阶段工作的测控通信形式,简化机载通信设备设计,实现遥测、遥控、任务载荷信息的远程传输的同时保持机间通信功能。

一种基于无人机蜂群动态部署的应急通信系统及通信方法.pdf
本发明提出了一种基于无人机蜂群动态部署的应急通信系统及通信方法,涉及无人机基站通信系统及通信方法的技术领域,一种基于无人机蜂群动态部署的应急通信系统,包括无人机蜂群和无人机地面站,所述无人机蜂群由无人机基站组网而成,所述无人机基站分别包括无人机和机载小基站。一种基于无人机蜂群动态部署的应急通信系统的通信方法,包括以下步骤:步骤1:通过无人机地面站将无人机部署至指定位置,利用无人机分别搭载的机载小基站进行组网,形成无人机蜂群,建立临时大面积移动通信网络覆盖;步骤2:无人机蜂群通过机载小基站将信号接入互联网小
一种无人机蜂群实时性协同通信方法.pdf
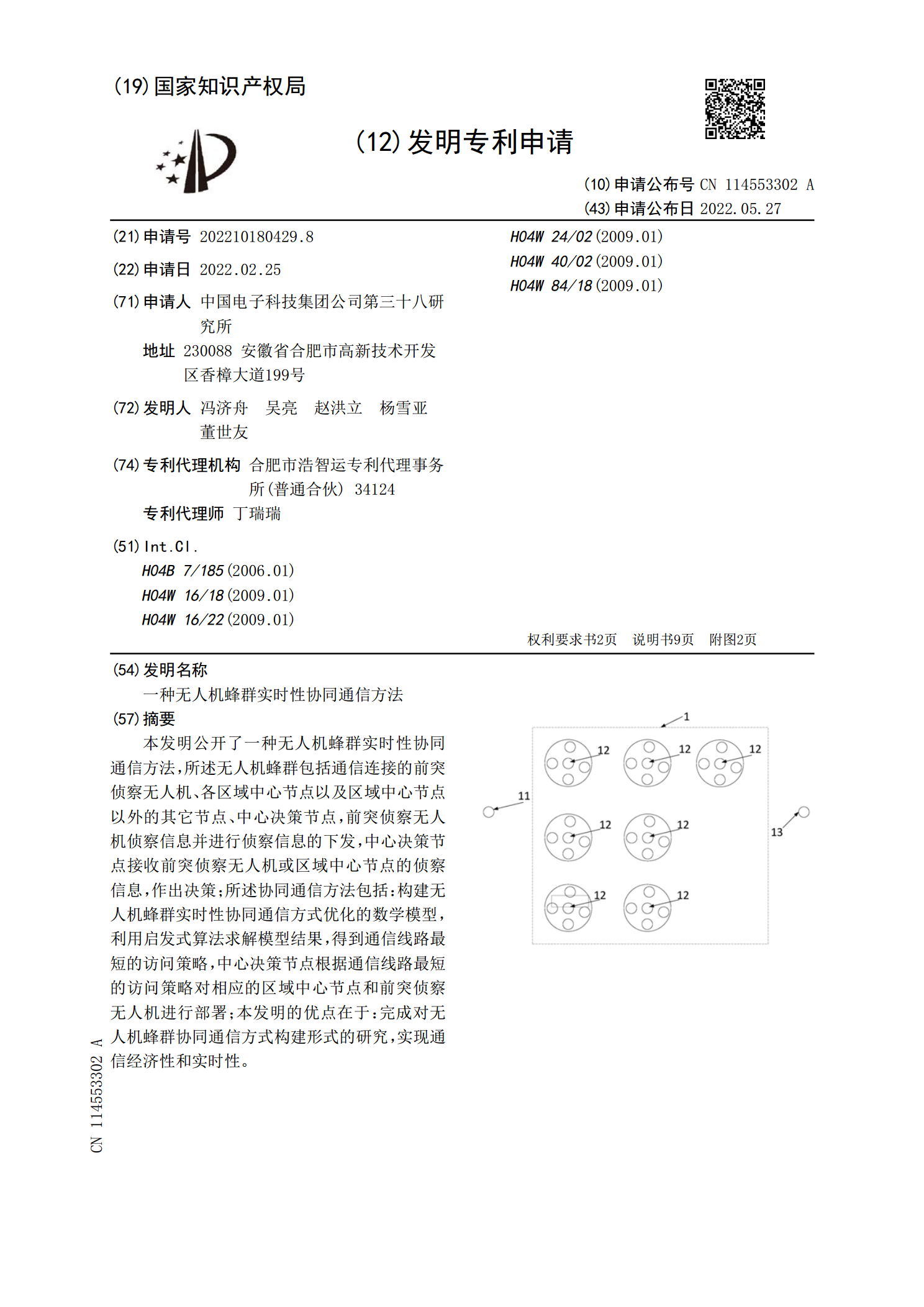
本发明公开了一种无人机蜂群实时性协同通信方法,所述无人机蜂群包括通信连接的前突侦察无人机、各区域中心节点以及区域中心节点以外的其它节点、中心决策节点,前突侦察无人机侦察信息并进行侦察信息的下发,中心决策节点接收前突侦察无人机或区域中心节点的侦察信息,作出决策;所述协同通信方法包括:构建无人机蜂群实时性协同通信方式优化的数学模型,利用启发式算法求解模型结果,得到通信线路最短的访问策略,中心决策节点根据通信线路最短的访问策略对相应的区域中心节点和前突侦察无人机进行部署;本发明的优点在于:完成对无人机蜂群协同通