
基于改进人工蜂群算法的移动机器人路径规划方法.pdf

美丽****ka

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于改进人工蜂群算法的移动机器人路径规划方法.pdf
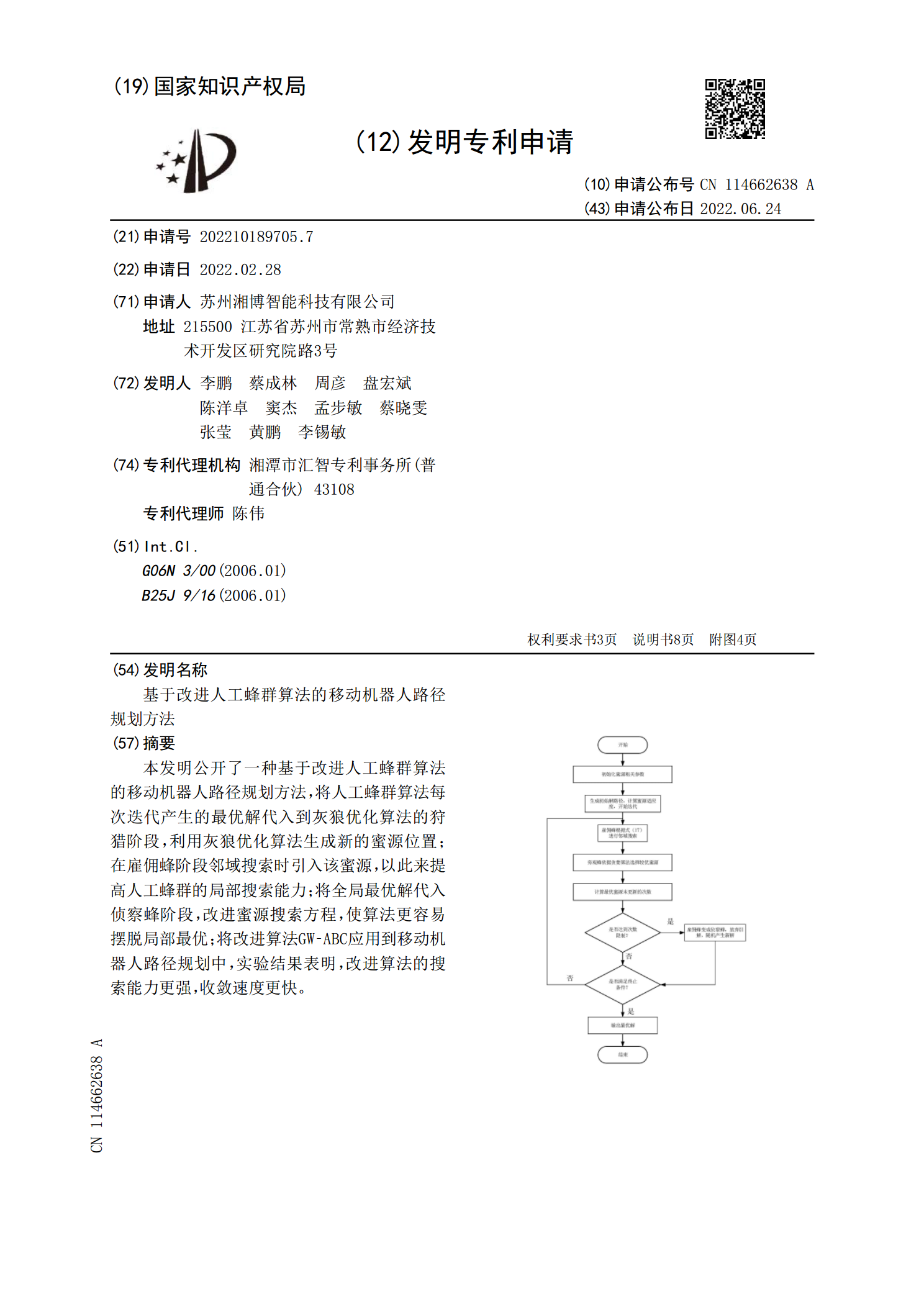
本发明公开了一种基于改进人工蜂群算法的移动机器人路径规划方法,将人工蜂群算法每次迭代产生的最优解代入到灰狼优化算法的狩猎阶段,利用灰狼优化算法生成新的蜜源位置;在雇佣蜂阶段邻域搜索时引入该蜜源,以此来提高人工蜂群的局部搜索能力;将全局最优解代入侦察蜂阶段,改进蜜源搜索方程,使算法更容易摆脱局部最优;将改进算法GW‑ABC应用到移动机器人路径规划中,实验结果表明,改进算法的搜索能力更强,收敛速度更快。

一种基于改进人工蜂群算法的路径规划方法.pdf
本发明提供一种基于改进人工蜂群算法的路径规划方法,人工蜂群算法迭代寻优过程中存在早熟收敛等缺陷,对于人工蜂群算法改进方面,本发明首先采用新的初始化策略,从而获得较高质量的初始种群并减少寻优迭代次数;然后在传统人工蜂群算法的雇佣蜂、跟随蜂和侦察蜂三个阶段采用不同的搜索方程,既可以增强局部搜索能力,又可以避免后期寻优过程的早熟收敛;最后将改进的人工蜂群算法应用于路径规划问题,既可以保证路径的安全可靠又可以保证路径的长度最短。

基于改进人工蜂群进化算法的移动机器人路径规划与仿真分析.docx
基于改进人工蜂群进化算法的移动机器人路径规划与仿真分析移动机器人路径规划是机器人领域的重要研究方向之一,而蜂群进化算法是自然界中的智能群体行为的一种模拟算法。本论文旨在基于改进的人工蜂群进化算法,研究移动机器人的路径规划,并进行相应的仿真分析。文章将分为以下几个部分进行论述:引言、相关工作、改进的人工蜂群进化算法、移动机器人路径规划、仿真实验以及结论。引言部分将介绍移动机器人路径规划的背景和意义,以及目前存在的问题。移动机器人在不同环境中需要选择最优路径进行导航,以实现任务的高效完成。而传统的路径规划算法

基于改进蜂群算法的无人机路径规划.pptx
基于改进蜂群算法的无人机路径规划01添加章节标题无人机路径规划概述无人机路径规划的定义和重要性无人机路径规划的常见算法改进蜂群算法的原理及应用蜂群算法的基本原理改进蜂群算法的主要思路改进蜂群算法在无人机路径规划中的应用基于改进蜂群算法的无人机路径规划实现路径规划问题的数学模型改进蜂群算法的步骤和流程无人机路径规划的实验结果及分析与其他算法的比较和分析与传统路径规划算法的比较与其他智能优化算法的比较优缺点分析及改进方向实际应用及未来展望无人机路径规划在军事、民用领域的应用前景未来研究方向和技术发展趋势感谢观

一种基于改进人工蜂群算法的机器人实时路径规划方法.docx
一种基于改进人工蜂群算法的机器人实时路径规划方法摘要:本文提出了一种基于改进人工蜂群算法的机器人实时路径规划方法。该方法结合了人工蜂群算法和最小二乘法,实现了机器人在复杂环境下的高效路径规划。通过对比实验,该方法在改善机器人路径规划效率和路径质量方面取得了良好的效果。关键词:机器人路径规划,人工蜂群算法,最小二乘法,路径质量介绍:机器人路径规划是一个关键的问题,它在机器人导航和控制中扮演重要角色。由于实际环境复杂且变化无常,如何构建高效的路径规划方法成为了当前的研究方向。本文提出一种基于改进人工蜂群算法的