
基于SAR图像的复杂舰船目标模型外形优化方法.pdf

一吃****新冬

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于SAR图像的复杂舰船目标模型外形优化方法.pdf
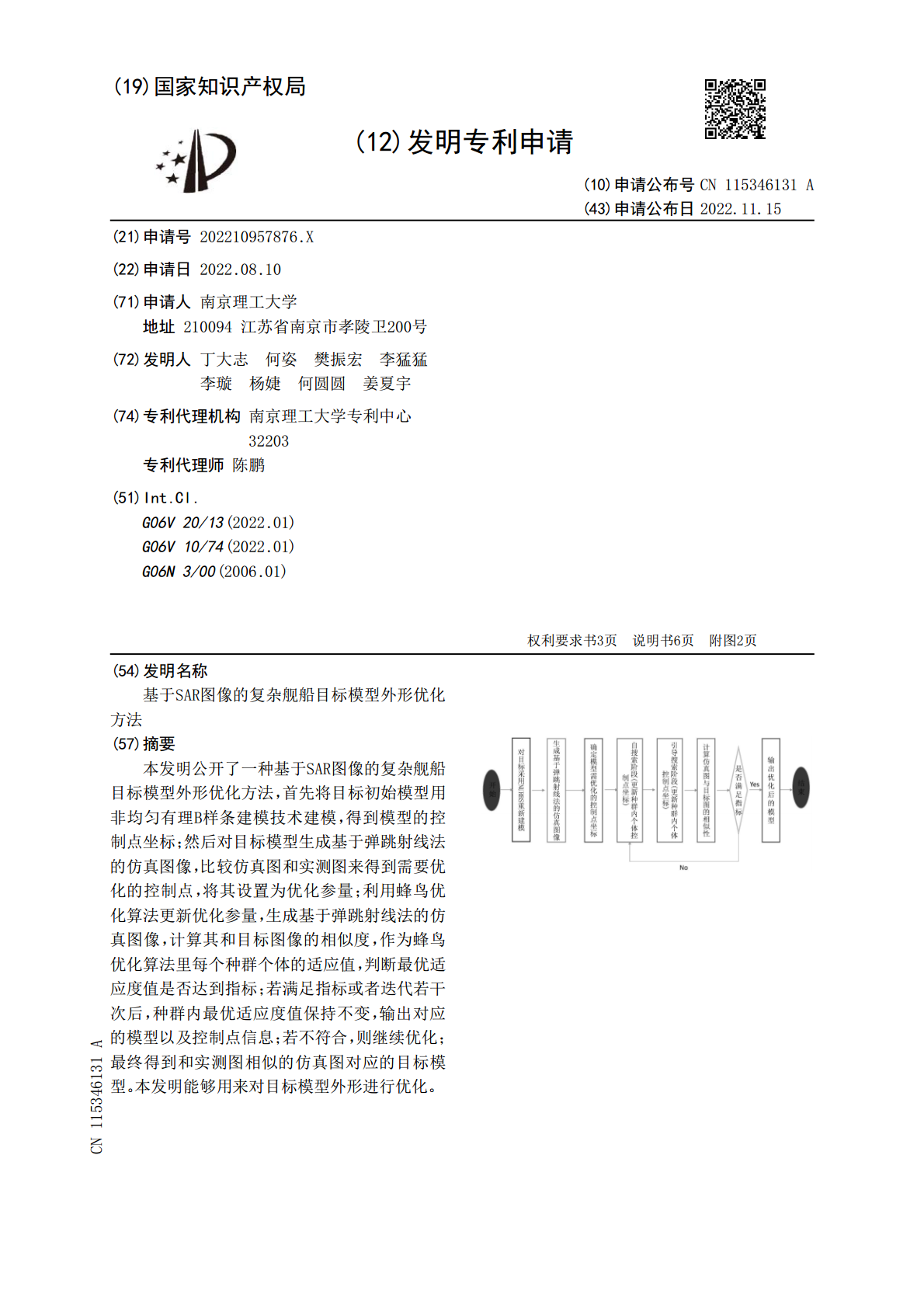
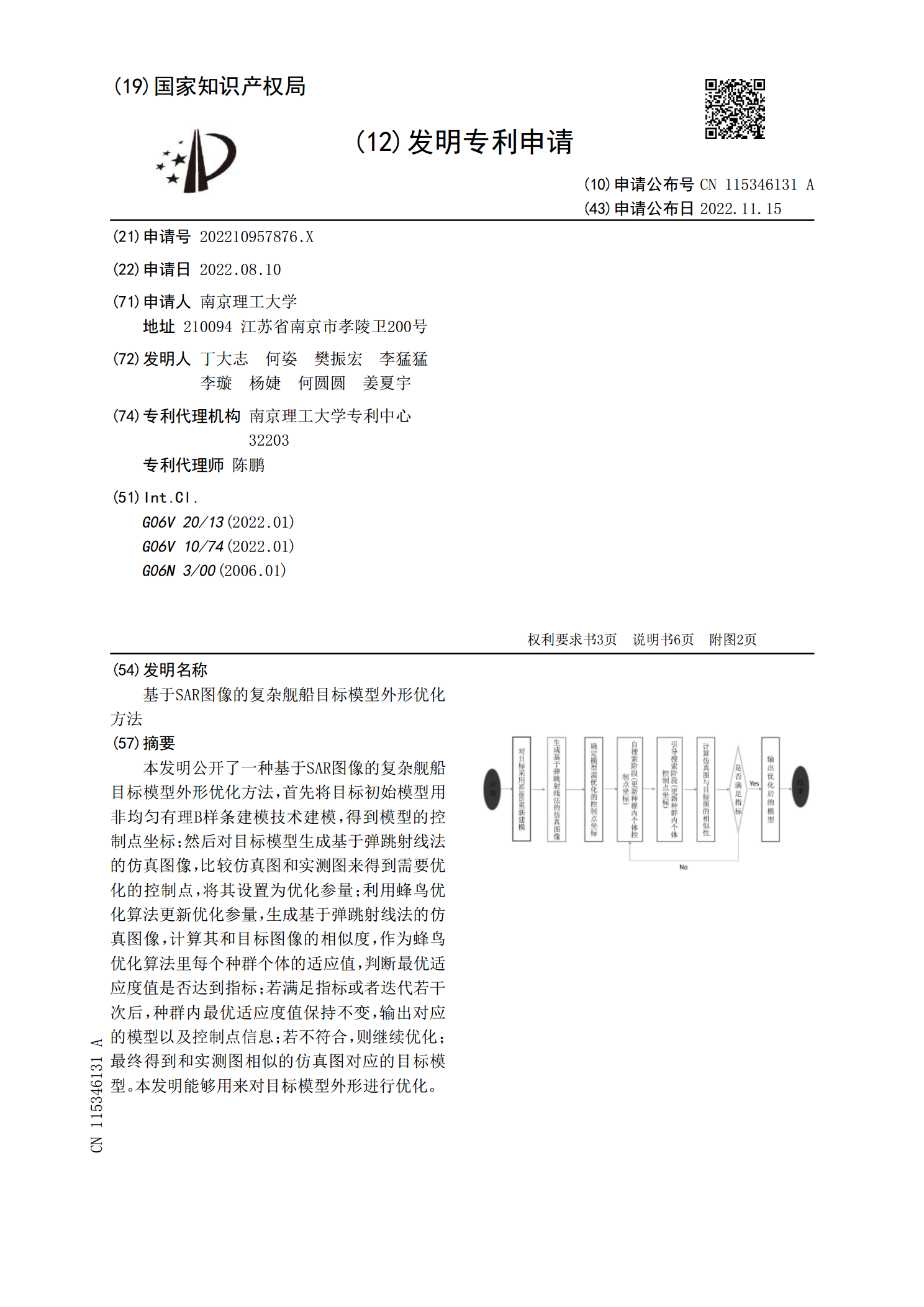
本发明公开了一种基于SAR图像的复杂舰船目标模型外形优化方法,首先将目标初始模型用非均匀有理B样条建模技术建模,得到模型的控制点坐标;然后对目标模型生成基于弹跳射线法的仿真图像,比较仿真图和实测图来得到需要优化的控制点,将其设置为优化参量;利用蜂鸟优化算法更新优化参量,生成基于弹跳射线法的仿真图像,计算其和目标图像的相似度,作为蜂鸟优化算法里每个种群个体的适应值,判断最优适应度值是否达到指标;若满足指标或者迭代若干次后,种群内最优适应度值保持不变,输出对应的模型以及控制点信息;若不符合,则继续优化;最终得

基于改进DETR模型的SAR图像舰船检测方法.docx
基于改进DETR模型的SAR图像舰船检测方法1.内容概览本篇论文提出了一种基于改进DETR模型的SAR图像舰船检测方法,旨在提高SAR图像中舰船目标的检测精度和效率。论文介绍了SAR图像的特点及其在军事、海洋监测等领域的重要性。分析了当前SAR图像舰船检测方法存在的问题,如检测精度不高、对复杂场景的适应能力较弱等。为了解决这些问题。DETR模型是一种基于Transformer的视觉编码器,通过自注意力机制捕获图像中的长距离依赖关系。DETR模型在处理SAR图像时存在一些局限性,如对目标尺度变化的适应性较差

基于粒子群优化的SAR图像舰船目标特征选择.docx
基于粒子群优化的SAR图像舰船目标特征选择基于粒子群优化的SAR图像舰船目标特征选择随着舰船目标在SAR图像中的识别和检测的需求日益增长,设计一种有效的舰船目标特征选择算法非常重要。本文提出了一种基于粒子群优化的舰船目标特征选择方法。该方法通过从SAR图像中提取出有效的特征,并利用粒子群优化算法来评估这些特征的重要性,从而确定最佳特征组合,以提高舰船目标检测的准确性和效率。在本文中,我们将介绍这种方法的原理、实现和实验结果,并探讨一些未来的研究方向。1.算法原理在SAR图像的舰船目标检测中,采用特征选择算

近岸及复杂背景SAR图像舰船目标检测方法研究.docx
近岸及复杂背景SAR图像舰船目标检测方法研究摘要:合成孔径雷达(SAR)在远程监测中起着至关重要的作用,特别是在近岸和复杂背景环境中。然而,在这样的环境中,舰船目标的检测变得困难,因为其与背景环境之间的反射和散射很容易混淆。因此,本文研究了近岸及复杂背景SAR图像舰船目标检测方法,旨在提出一种高效准确的目标检测算法。第一部分介绍了近岸及复杂背景环境下的舰船目标检测的重要性和挑战。其中,提到了SAR图像在远程监测中的的广泛应用以及舰船目标检测的关键作用。然后,讨论了近岸和复杂背景环境中可能遇到的挑战,如强烈

基于RetinaNet的SAR图像舰船目标检测.docx
基于RetinaNet的SAR图像舰船目标检测标题:基于RetinaNet的SAR图像舰船目标检测摘要:合成孔径雷达(SyntheticApertureRadar,SAR)技术在航海领域具有广泛应用。SAR图像的特点使得舰船目标的检测面临许多挑战。目前,深度学习方法已经在目标检测中取得了显著的成功。本文提出了一种基于RetinaNet的SAR图像舰船目标检测方法。实验结果表明,该方法能够有效地检测出SAR图像中的舰船目标,并具有较高的检测精度和鲁棒性。1.引言随着合成孔径雷达技术的不断发展,SAR图像在航