
热风炉自动寻优燃烧智能控制方法.pdf

是你****优呀

1/10
2/10
3/10
4/10

5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

热风炉自动寻优燃烧智能控制方法.pdf
本发明提供了一种热风炉自动寻优燃烧智能控制方法,它基于总供热量计算,通过设定燃烧拱顶温度及废气温度目标值,空燃比模糊控制器在燃烧周期内实时寻优最佳空燃比系数,对助燃空气流量及混合煤气流量实时调节;助燃空气流量的控制由废气温度调节器、供热量调节器及助燃空气调节器完成;混合煤气流量的控制由拱顶温度调节器和混合煤气调节器完成;空燃比控制由空燃比模糊控制器完成。本发明能提高热风炉的燃烧控制水平,燃烧效率高,能源利用充分,蓄热能力强。

热风炉自动寻优燃烧智能控制系统.pdf
本发明提供了一种热风炉自动寻优燃烧智能控制系统,它包括混合煤气流量调节器(FIC-101)、拱顶温度调节器(TIC-101)、助燃空气流量调节器(FIC-102)、供热量调节器(QX-102)、废气温度调节器(TIC-102)和空燃比模糊控制器。本发明能提高热风炉的燃烧控制水平,燃烧效率高,能源利用充分,蓄热能力强。

热风炉燃烧过程智能控制系统及方法.pdf
本发明提供一种热风炉燃烧过程的智能控制系统,包括专家协调控制器,用于识别燃烧状态,选择不同燃烧阶段的模糊控制器;快速加热期空燃比寻优模糊控制器,用于在快速加热期,输出空燃比的调节增量;拱顶温度管理期空燃比寻优模糊控制器,用于在拱顶温度管理期,输出空气煤气流量比的调节增量;流量给定计算模块,用于计算煤气流量设定值和空气流量设定值;流量模糊专家控制器,采用反馈加前馈的控制策略,根据理想状态下调节阀流量特性,反馈环节采用模糊控制策略,同时利用前馈环节对压力扰动进行前馈补偿,实现流量的优化控制。本发明实现燃烧过程

一种基于模糊控制思想的热风炉自动燃烧控制方法.pdf
本发明涉及一种基于模糊控制思想的热风炉自动燃烧控制方法,属于热风炉燃烧控制技术领域。本发明的技术方案是:顶温控制阶段:使用模糊控制算法,控制器的输入为顶温误差E和顶温误差的变化量EC;烟温控制阶段:使用模糊控制算法,控制器的输入为烟气的温升速率偏差
一种热风炉燃烧自动控制系统及其控制方法.pdf
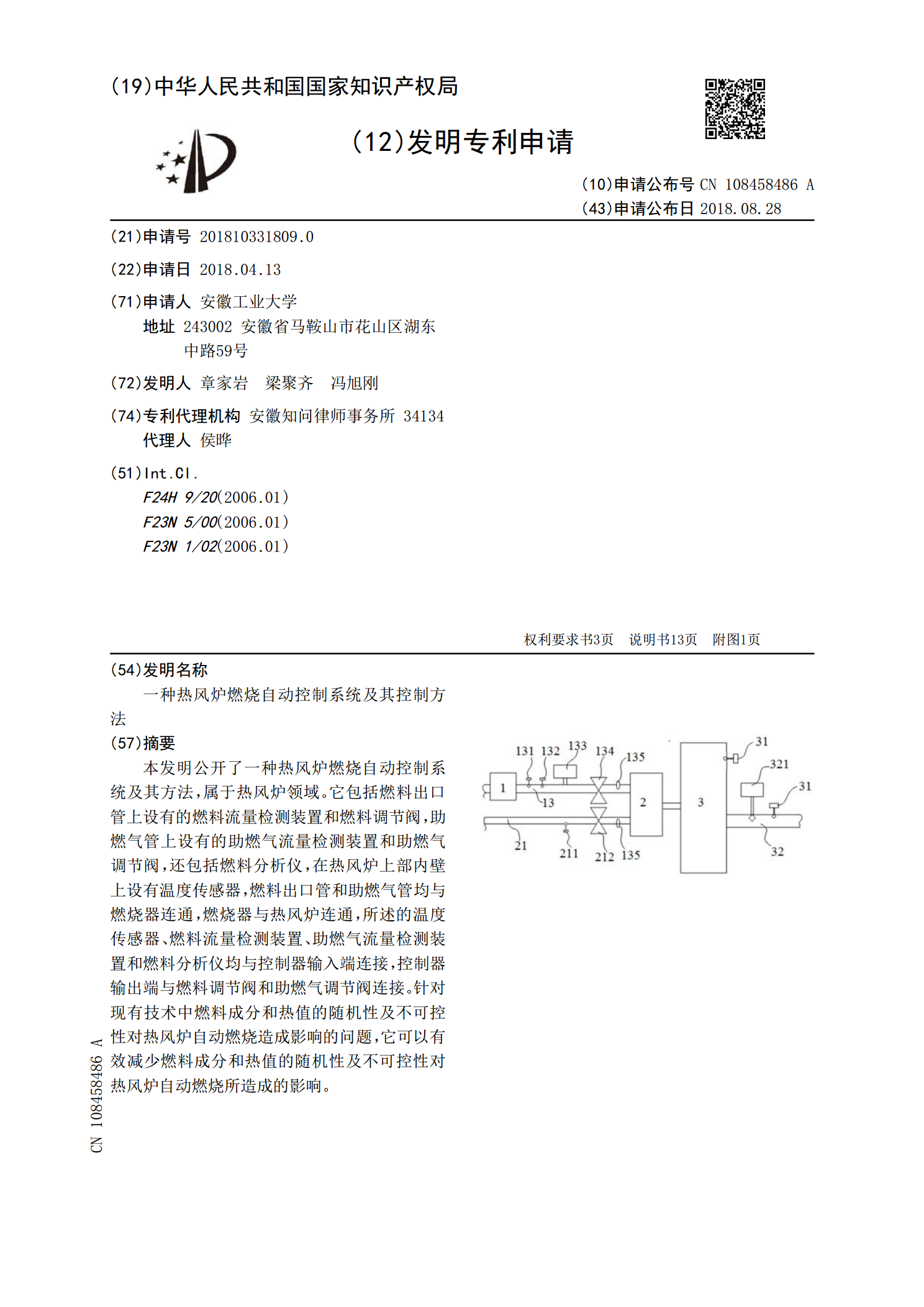
本发明公开了一种热风炉燃烧自动控制系统及其方法,属于热风炉领域。它包括燃料出口管上设有的燃料流量检测装置和燃料调节阀,助燃气管上设有的助燃气流量检测装置和助燃气调节阀,还包括燃料分析仪,在热风炉上部内壁上设有温度传感器,燃料出口管和助燃气管均与燃烧器连通,燃烧器与热风炉连通,所述的温度传感器、燃料流量检测装置、助燃气流量检测装置和燃料分析仪均与控制器输入端连接,控制器输出端与燃料调节阀和助燃气调节阀连接。针对现有技术中燃料成分和热值的随机性及不可控性对热风炉自动燃烧造成影响的问题,它可以有效减少燃料成分和