
机器人自动开堵炉眼装置.pdf

mm****酱吖

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
机器人自动开堵炉眼装置.pdf
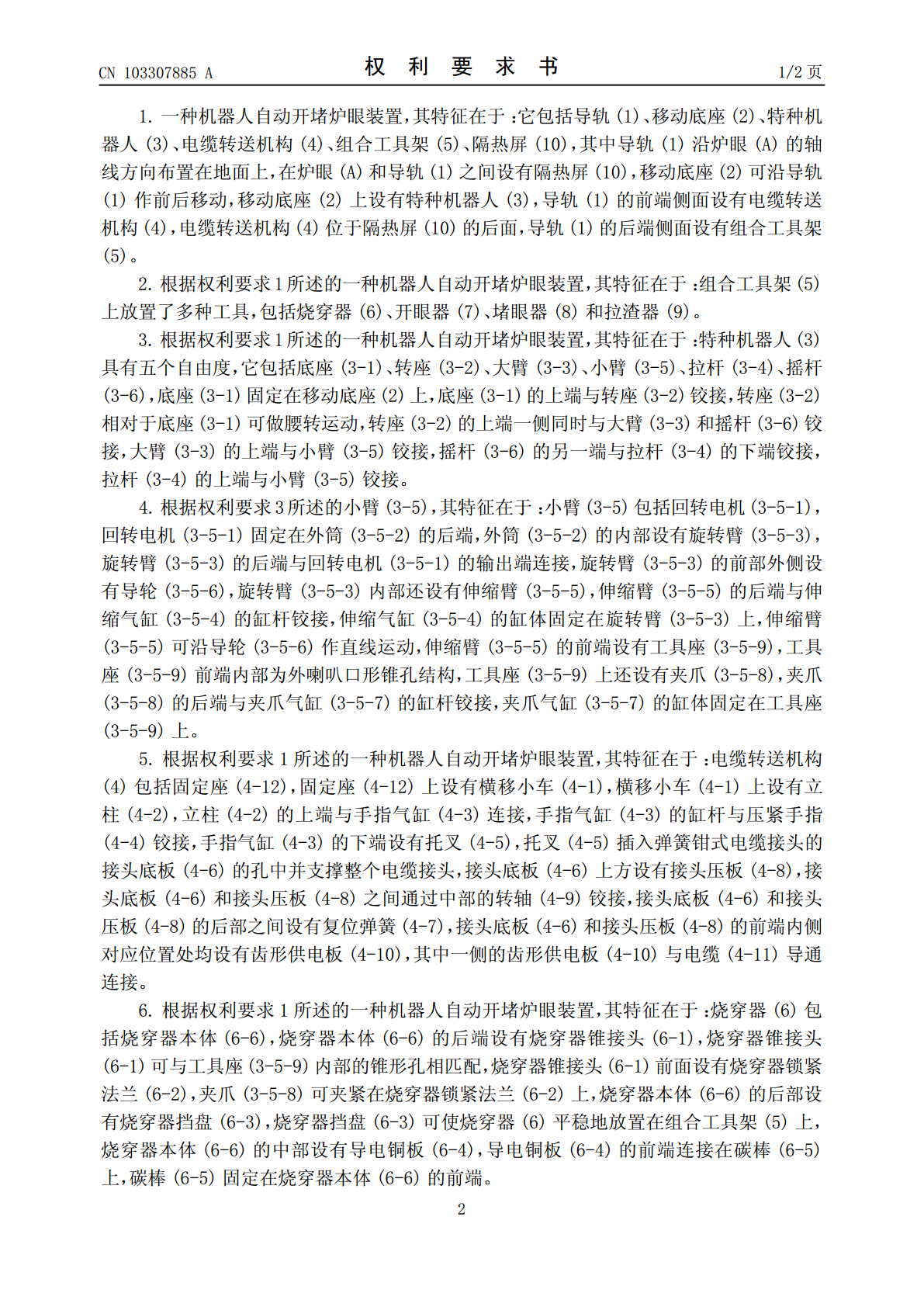
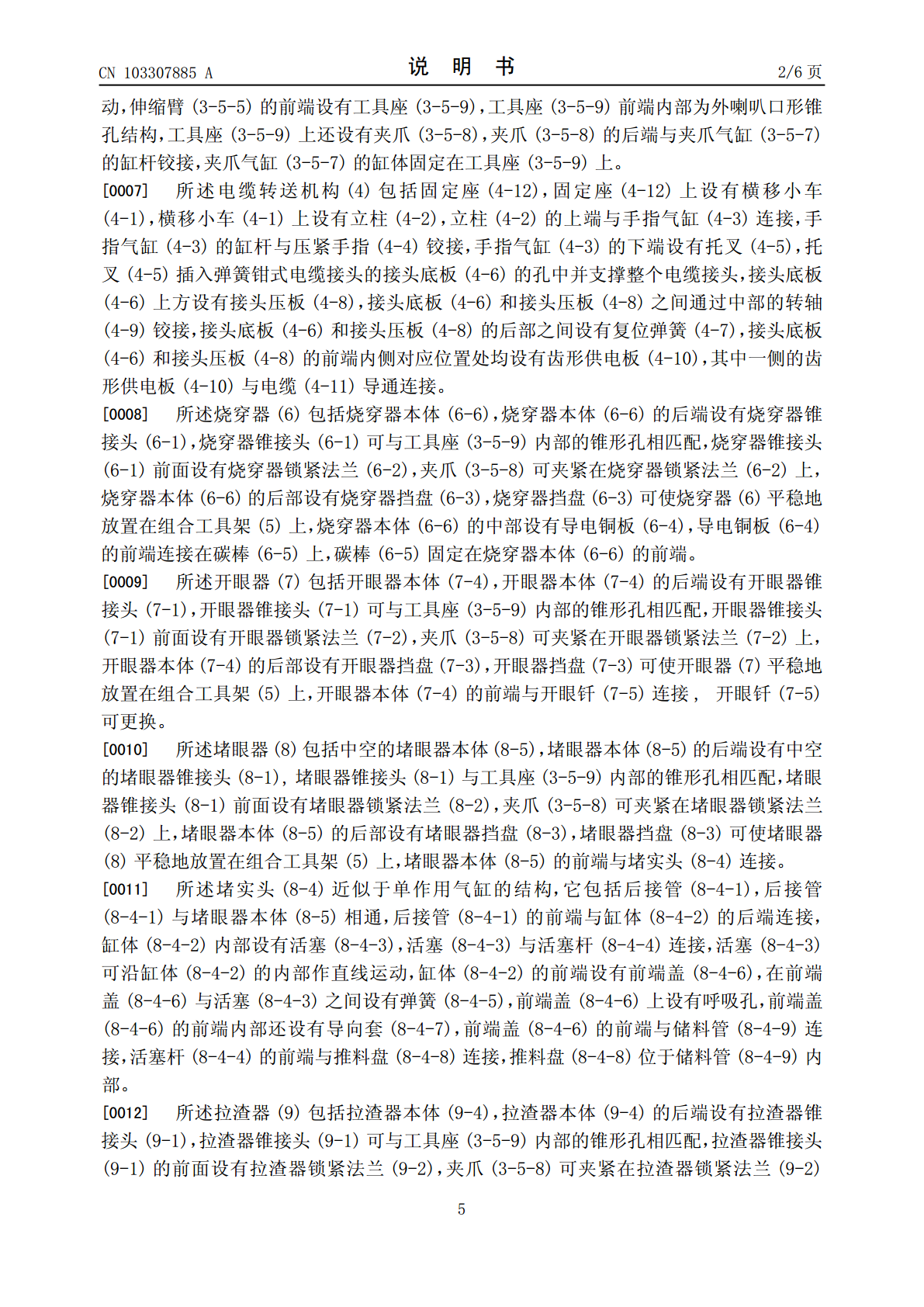
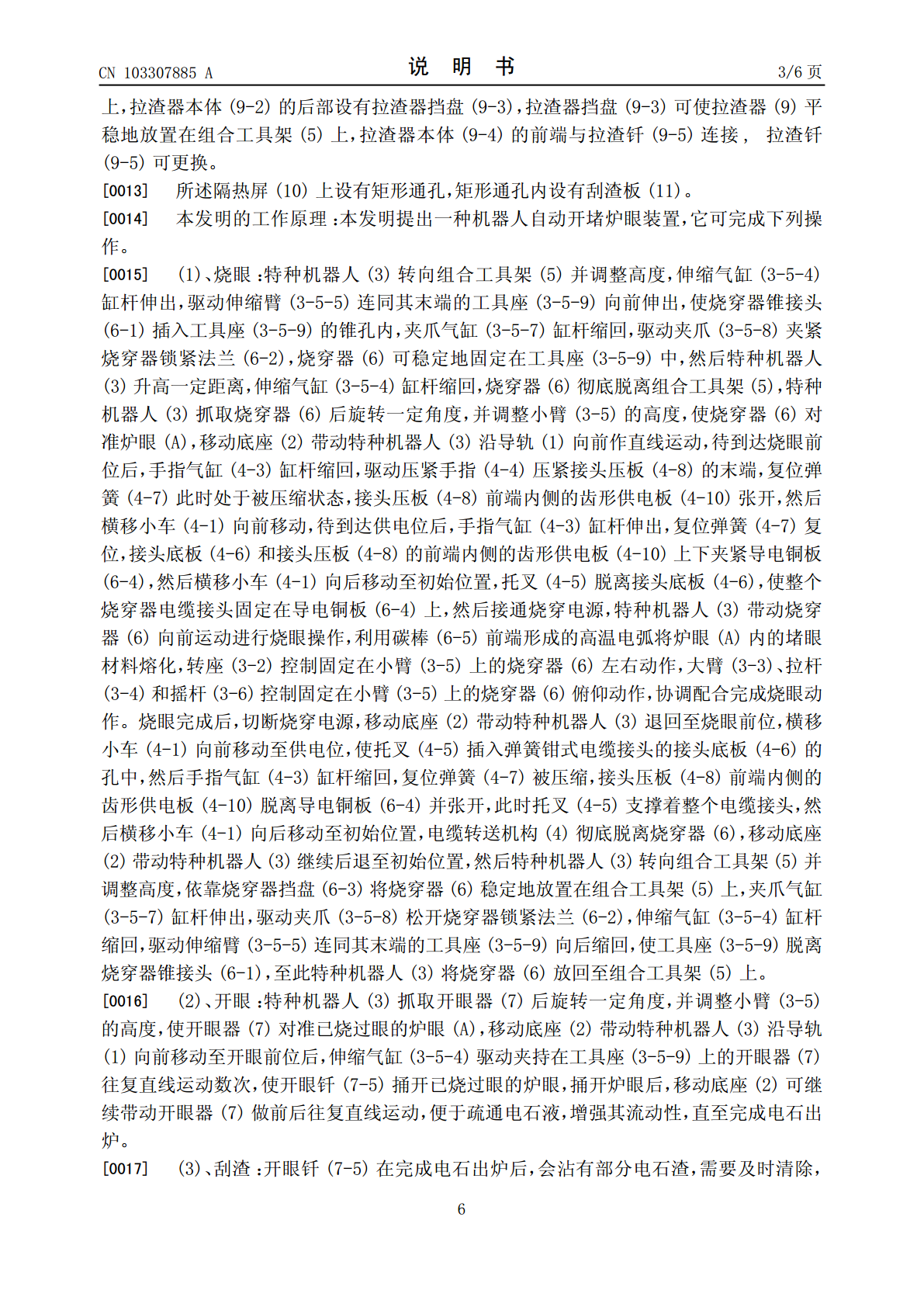
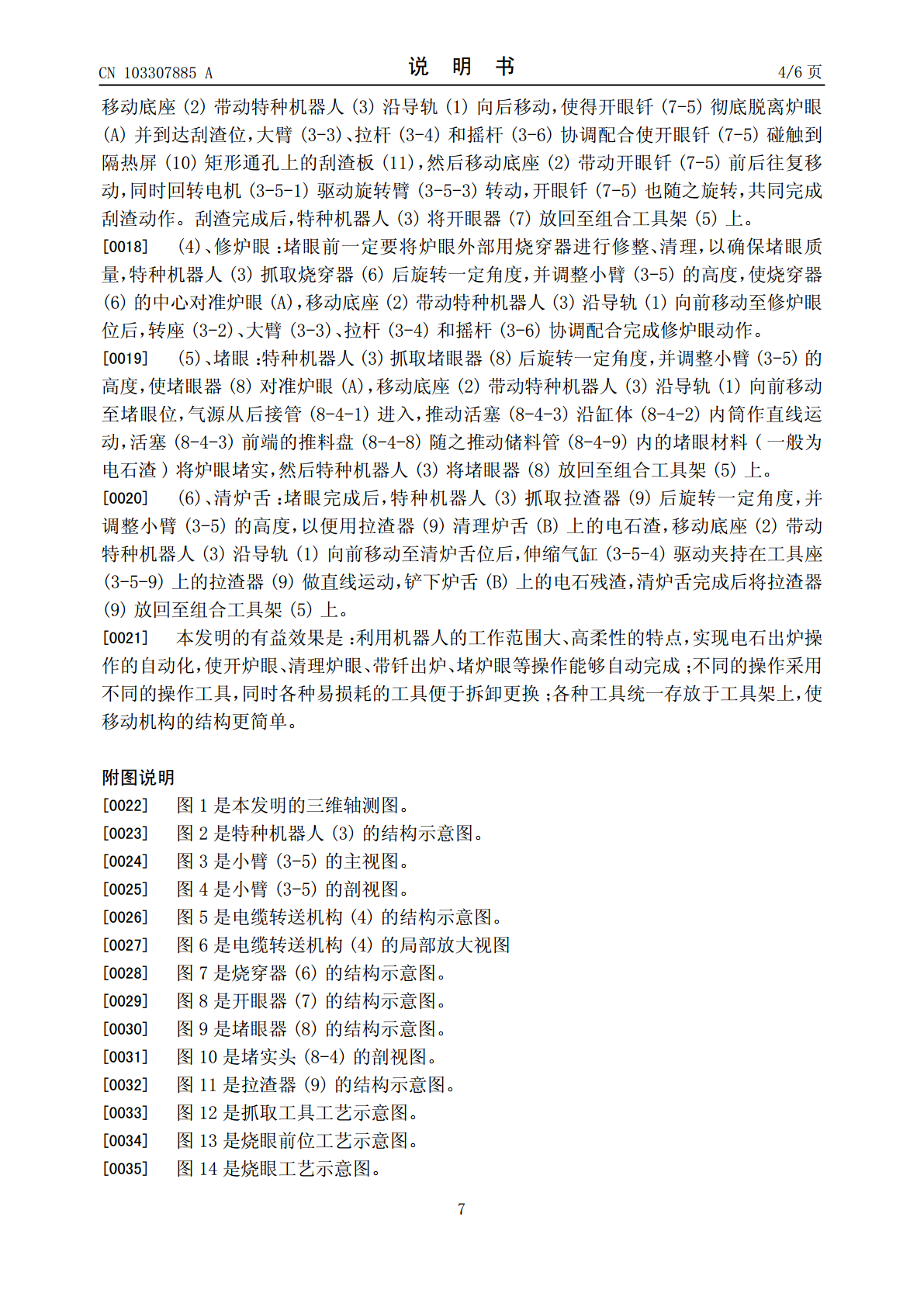
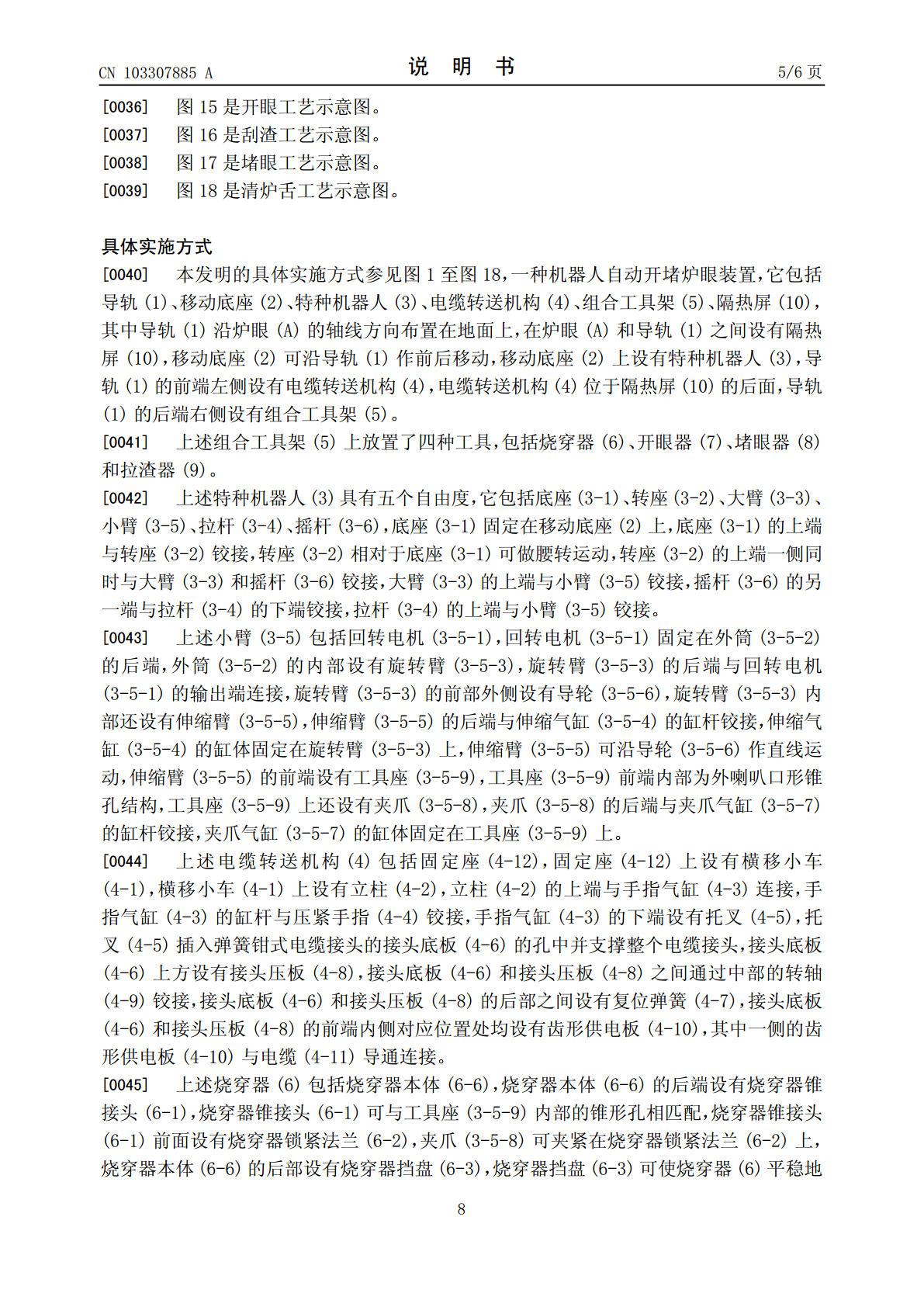
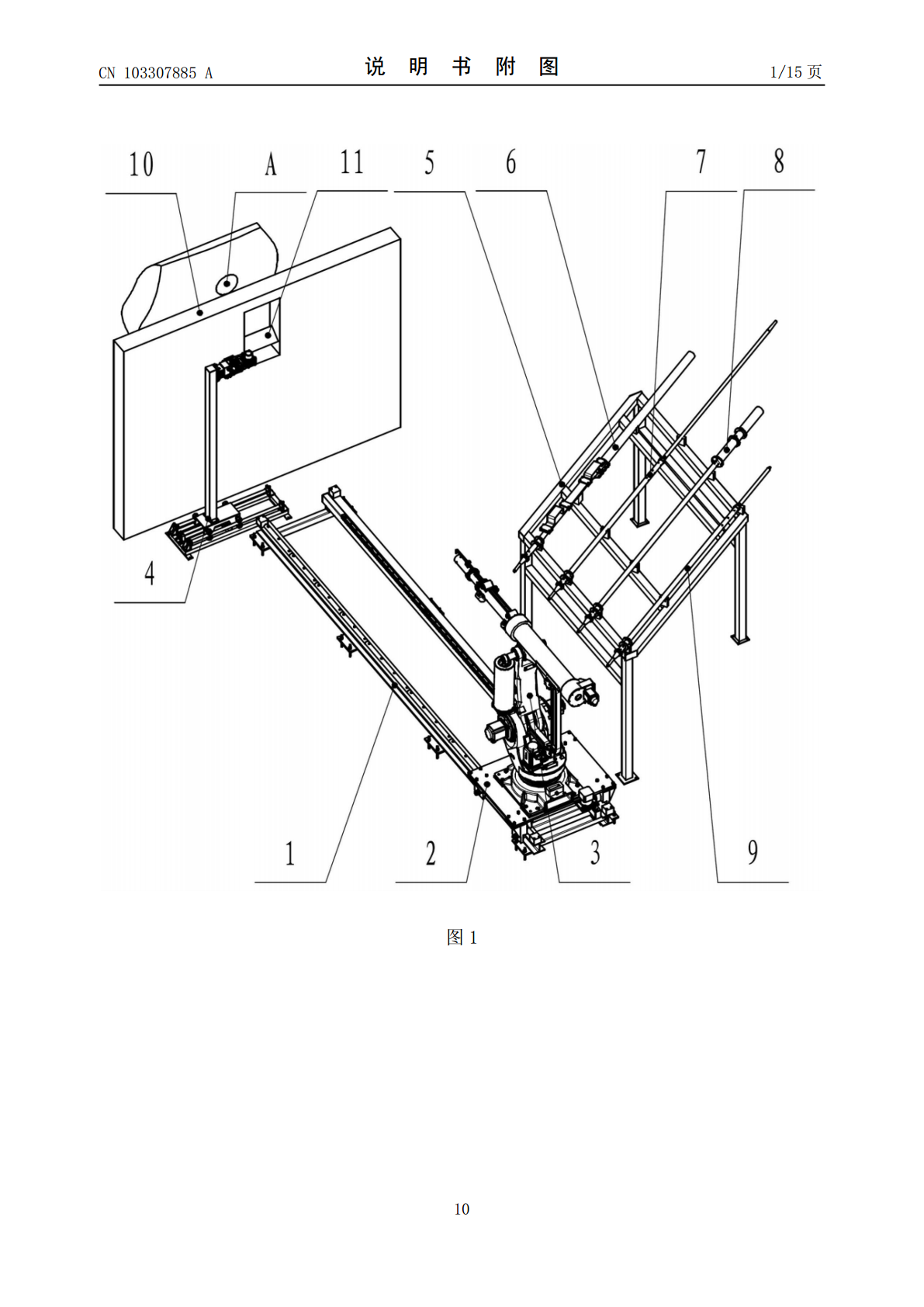
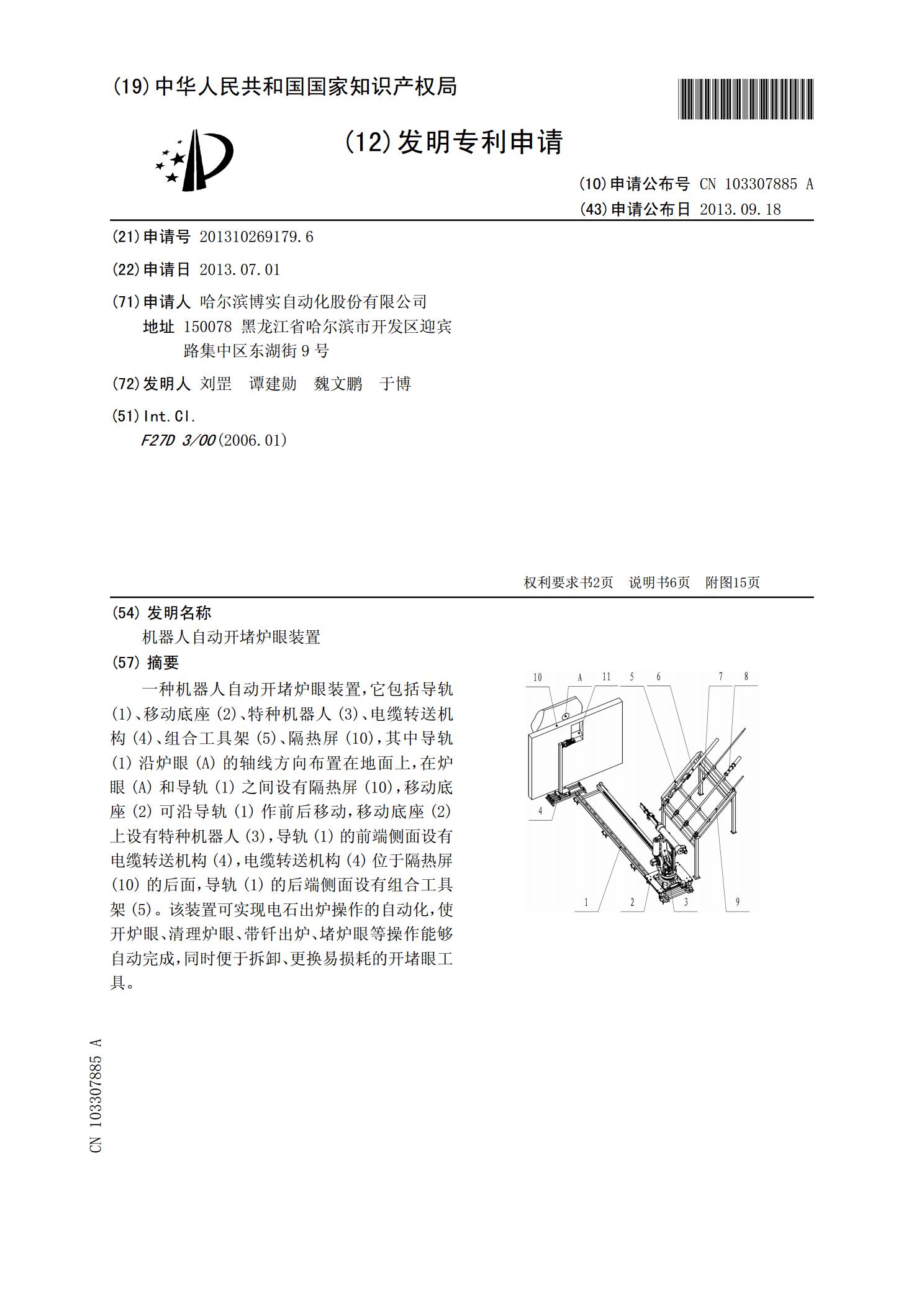
一种机器人自动开堵炉眼装置,它包括导轨(1)、移动底座(2)、特种机器人(3)、电缆转送机构(4)、组合工具架(5)、隔热屏(10),其中导轨(1)沿炉眼(A)的轴线方向布置在地面上,在炉眼(A)和导轨(1)之间设有隔热屏(10),移动底座(2)可沿导轨(1)作前后移动,移动底座(2)上设有特种机器人(3),导轨(1)的前端侧面设有电缆转送机构(4),电缆转送机构(4)位于隔热屏(10)的后面,导轨(1)的后端侧面设有组合工具架(5)。该装置可实现电石出炉操作的自动化,使开炉眼、清理炉眼、带钎出炉、堵炉眼
侧吹炉开堵风眼装置.pdf
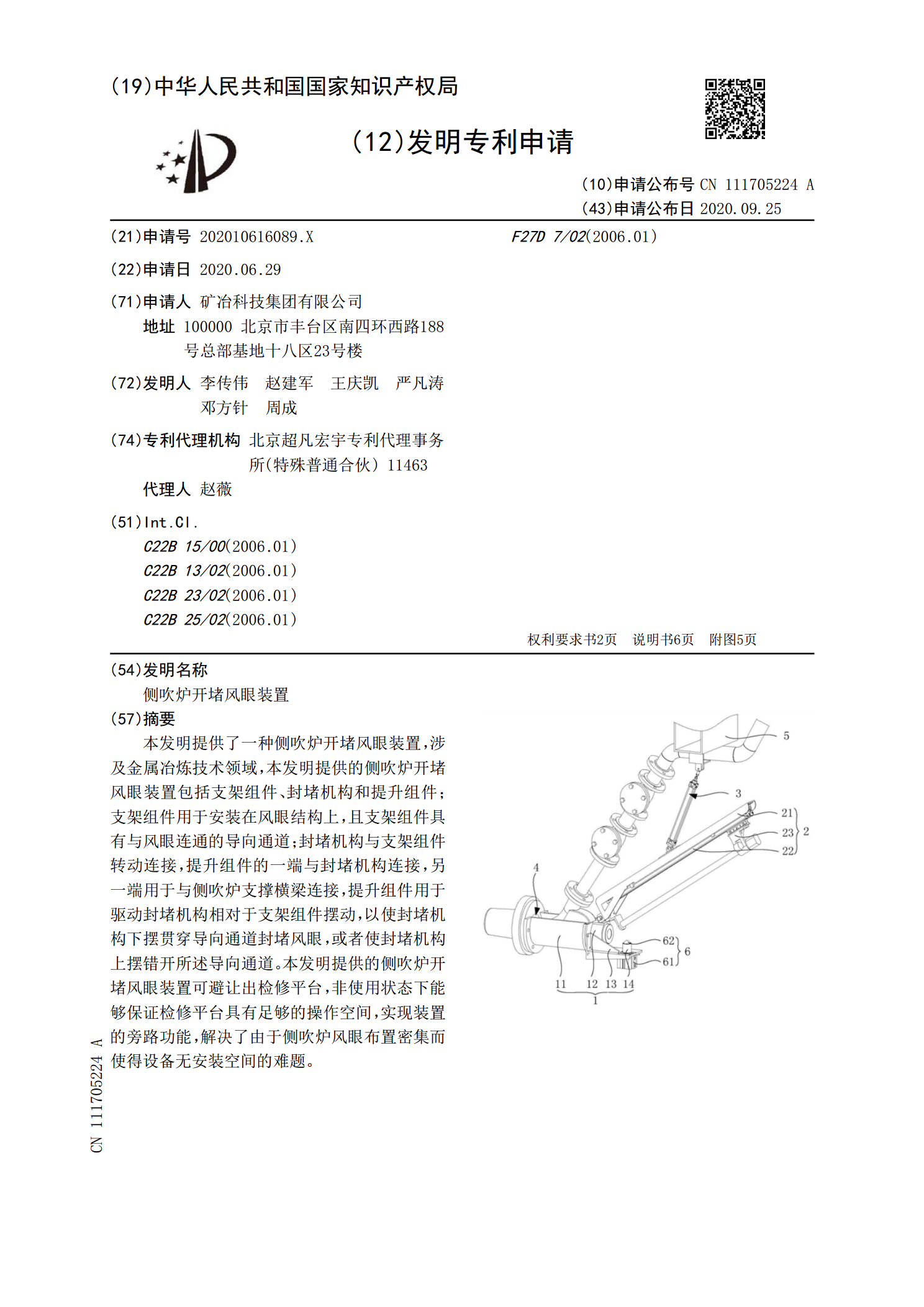
本发明提供了一种侧吹炉开堵风眼装置,涉及金属冶炼技术领域,本发明提供的侧吹炉开堵风眼装置包括支架组件、封堵机构和提升组件;支架组件用于安装在风眼结构上,且支架组件具有与风眼连通的导向通道;封堵机构与支架组件转动连接,提升组件的一端与封堵机构连接,另一端用于与侧吹炉支撑横梁连接,提升组件用于驱动封堵机构相对于支架组件摆动,以使封堵机构下摆贯穿导向通道封堵风眼,或者使封堵机构上摆错开所述导向通道。本发明提供的侧吹炉开堵风眼装置可避让出检修平台,非使用状态下能够保证检修平台具有足够的操作空间,实现装置的旁路功能
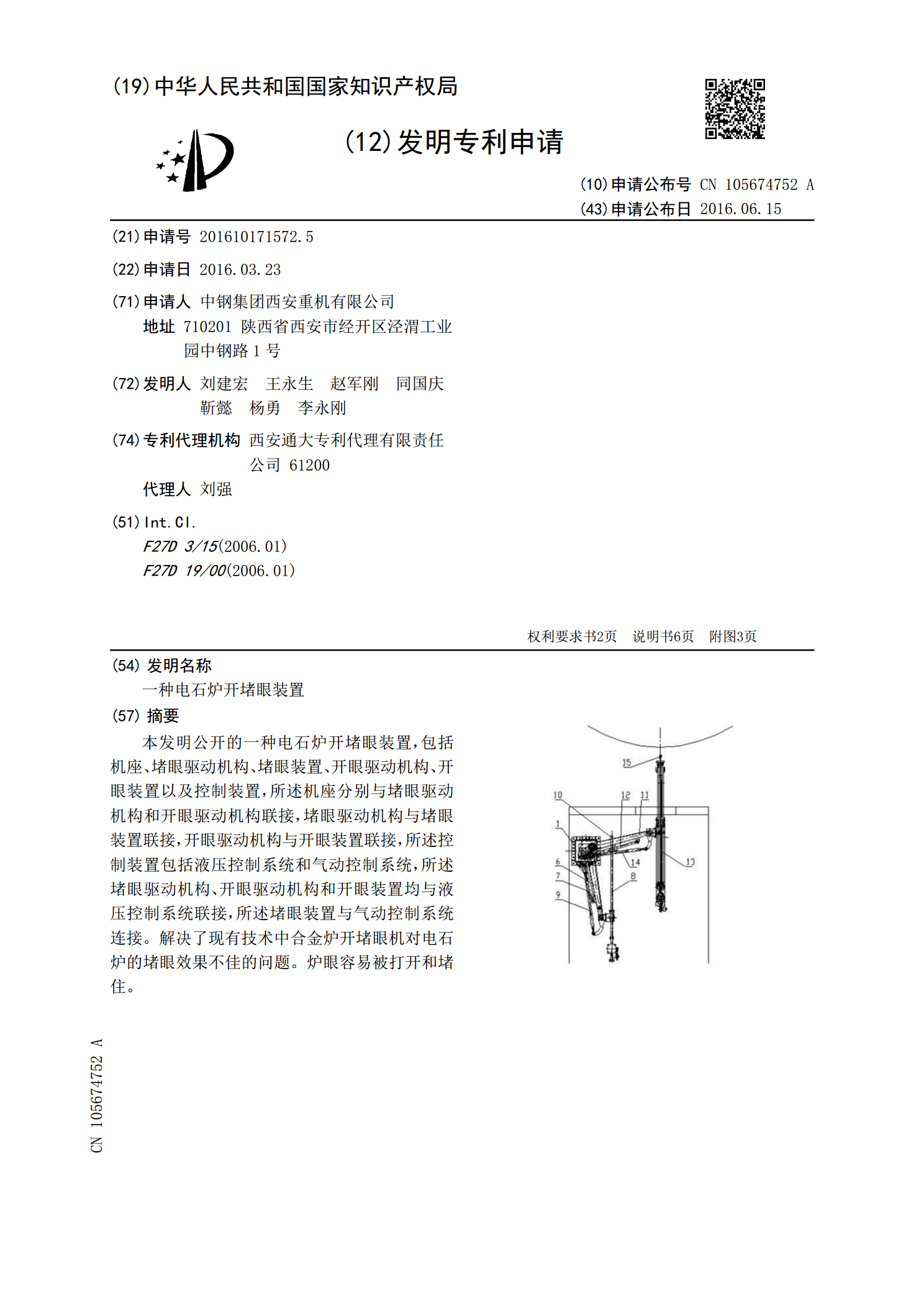
一种电石炉开堵眼装置.pdf
本发明公开的一种电石炉开堵眼装置,包括机座、堵眼驱动机构、堵眼装置、开眼驱动机构、开眼装置以及控制装置,所述机座分别与堵眼驱动机构和开眼驱动机构联接,堵眼驱动机构与堵眼装置联接,开眼驱动机构与开眼装置联接,所述控制装置包括液压控制系统和气动控制系统,所述堵眼驱动机构、开眼驱动机构和开眼装置均与液压控制系统联接,所述堵眼装置与气动控制系统连接。解决了现有技术中合金炉开堵眼机对电石炉的堵眼效果不佳的问题。炉眼容易被打开和堵住。
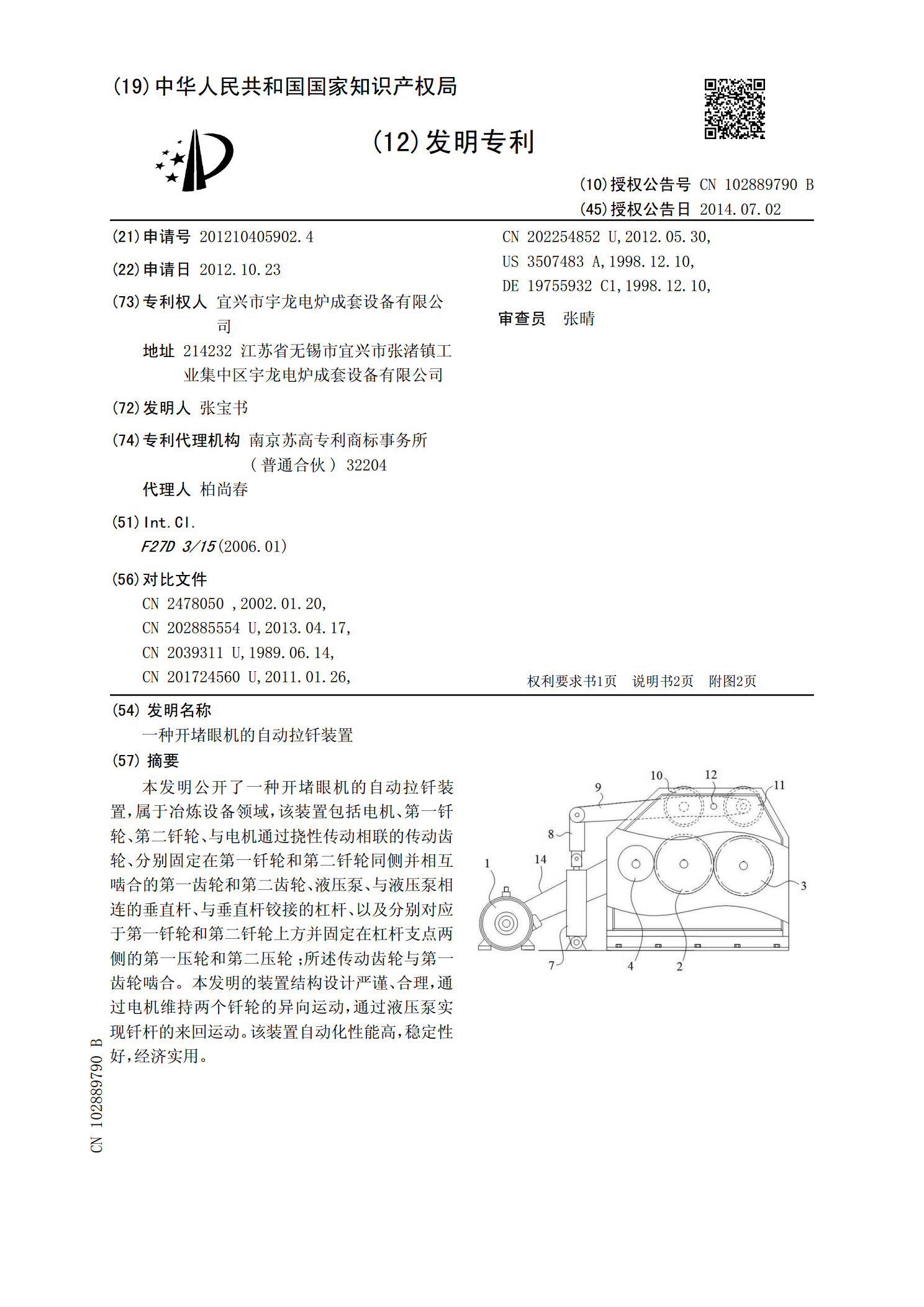
一种开堵眼机的自动拉钎装置.pdf
本发明公开了一种开堵眼机的自动拉钎装置,属于冶炼设备领域,该装置包括电机、第一钎轮、第二钎轮、与电机通过挠性传动相联的传动齿轮、分别固定在第一钎轮和第二钎轮同侧并相互啮合的第一齿轮和第二齿轮、液压泵、与液压泵相连的垂直杆、与垂直杆铰接的杠杆、以及分别对应于第一钎轮和第二钎轮上方并固定在杠杆支点两侧的第一压轮和第二压轮;所述传动齿轮与第一齿轮啮合。本发明的装置结构设计严谨、合理,通过电机维持两个钎轮的异向运动,通过液压泵实现钎杆的来回运动。该装置自动化性能高,稳定性好,经济实用。
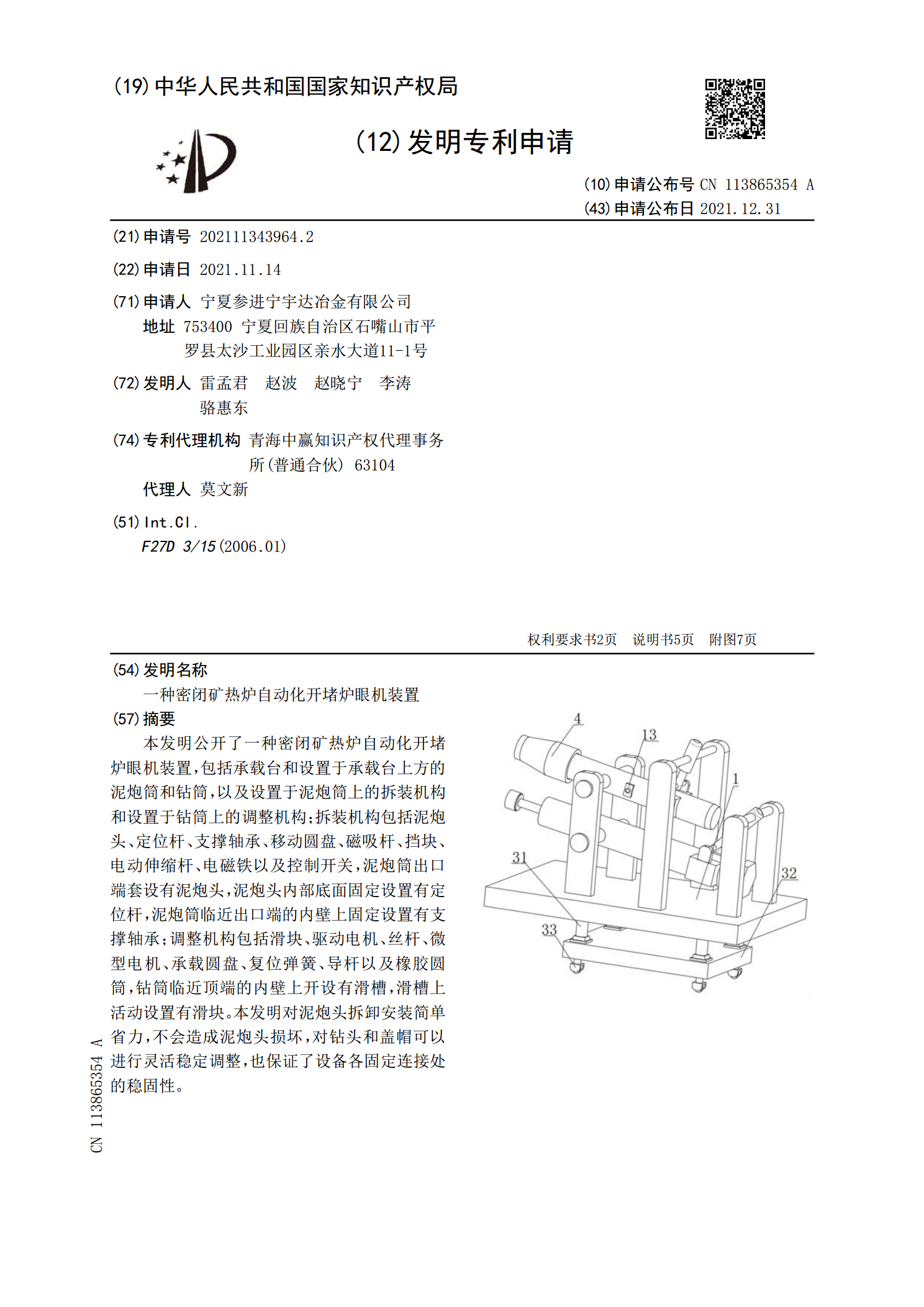
一种密闭矿热炉自动化开堵炉眼机装置.pdf
本发明公开了一种密闭矿热炉自动化开堵炉眼机装置,包括承载台和设置于承载台上方的泥炮筒和钻筒,以及设置于泥炮筒上的拆装机构和设置于钻筒上的调整机构;拆装机构包括泥炮头、定位杆、支撑轴承、移动圆盘、磁吸杆、挡块、电动伸缩杆、电磁铁以及控制开关,泥炮筒出口端套设有泥炮头,泥炮头内部底面固定设置有定位杆,泥炮筒临近出口端的内壁上固定设置有支撑轴承;调整机构包括滑块、驱动电机、丝杆、微型电机、承载圆盘、复位弹簧、导杆以及橡胶圆筒,钻筒临近顶端的内壁上开设有滑槽,滑槽上活动设置有滑块。本发明对泥炮头拆卸安装简单省力,