
利用数学建模测量锅炉水冷壁熔敷层厚度的爬壁机器人.pdf

霞英****娘子

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
利用数学建模测量锅炉水冷壁熔敷层厚度的爬壁机器人.pdf
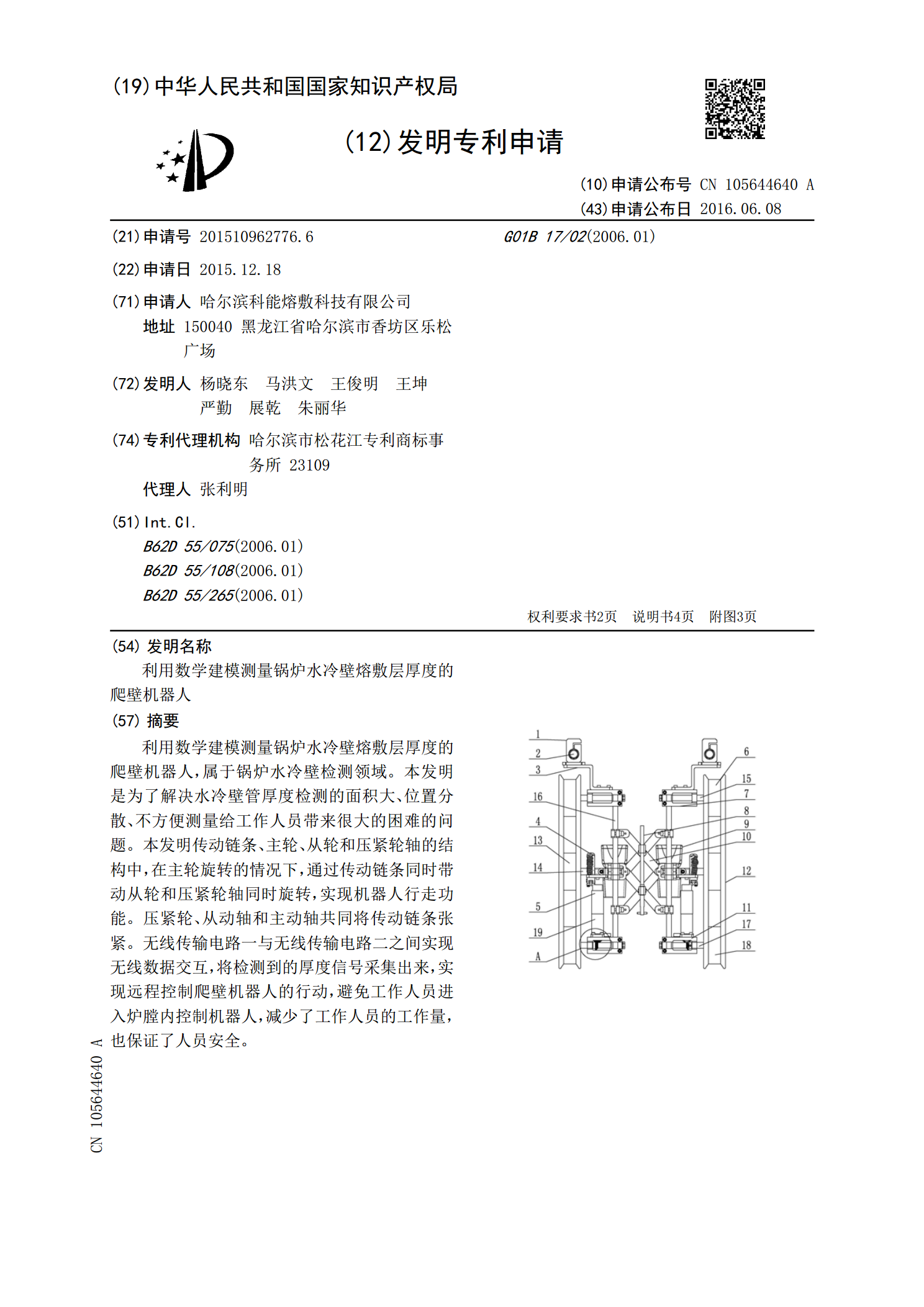
利用数学建模测量锅炉水冷壁熔敷层厚度的爬壁机器人,属于锅炉水冷壁检测领域。本发明是为了解决水冷壁管厚度检测的面积大、位置分散、不方便测量给工作人员带来很大的困难的问题。本发明传动链条、主轮、从轮和压紧轮轴的结构中,在主轮旋转的情况下,通过传动链条同时带动从轮和压紧轮轴同时旋转,实现机器人行走功能。压紧轮、从动轴和主动轴共同将传动链条张紧。无线传输电路一与无线传输电路二之间实现无线数据交互,将检测到的厚度信号采集出来,实现远程控制爬壁机器人的行动,避免工作人员进入炉膛内控制机器人,减少了工作人员的工作量,也
测量水冷壁熔敷层单点厚度的电磁轮式爬壁机器人.pdf
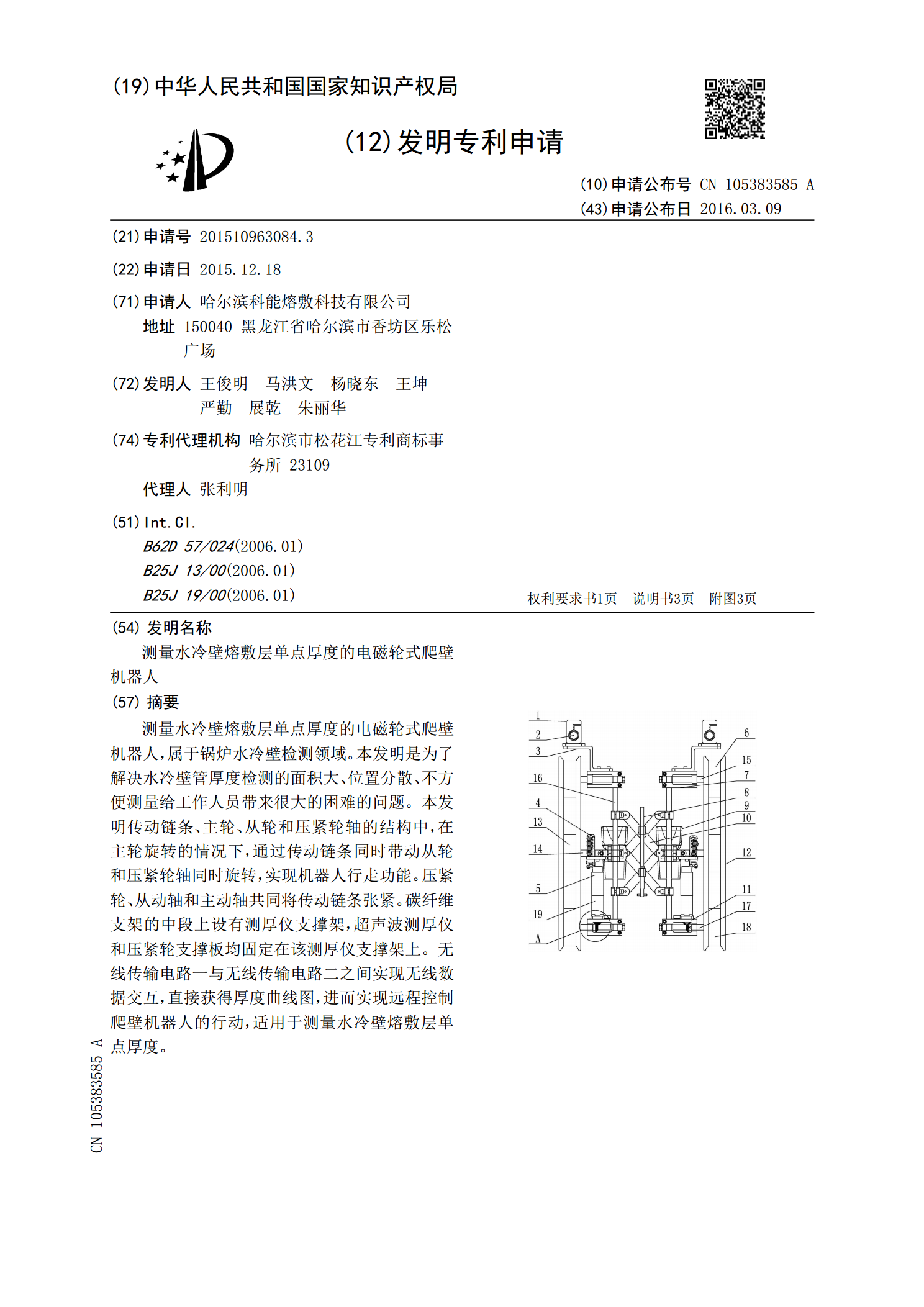
测量水冷壁熔敷层单点厚度的电磁轮式爬壁机器人,属于锅炉水冷壁检测领域。本发明是为了解决水冷壁管厚度检测的面积大、位置分散、不方便测量给工作人员带来很大的困难的问题。本发明传动链条、主轮、从轮和压紧轮轴的结构中,在主轮旋转的情况下,通过传动链条同时带动从轮和压紧轮轴同时旋转,实现机器人行走功能。压紧轮、从动轴和主动轴共同将传动链条张紧。碳纤维支架的中段上设有测厚仪支撑架,超声波测厚仪和压紧轮支撑板均固定在该测厚仪支撑架上。无线传输电路一与无线传输电路二之间实现无线数据交互,直接获得厚度曲线图,进而实现远程控
一种锅炉水冷壁熔敷层多点同步测厚的爬壁机器人.pdf
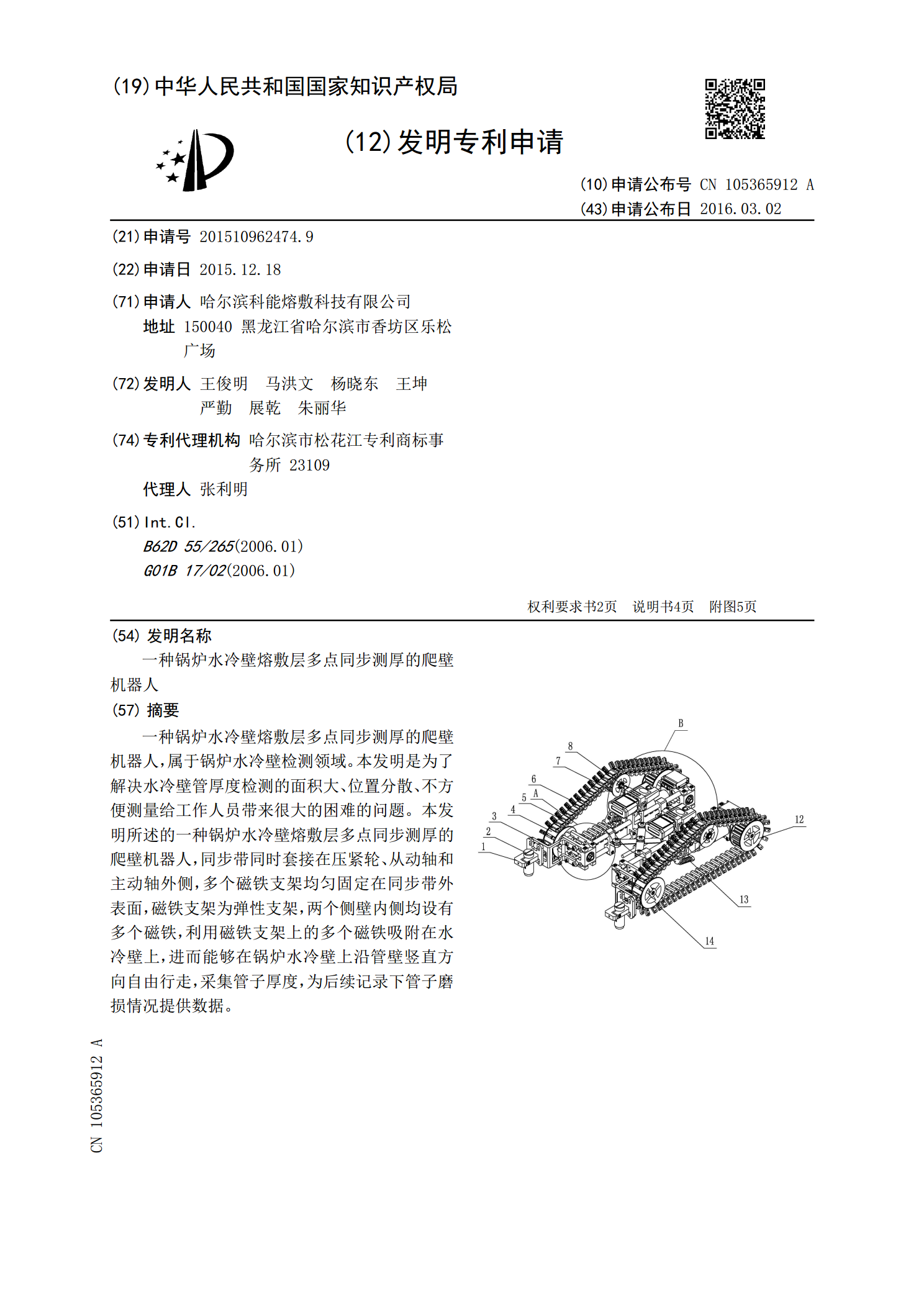
一种锅炉水冷壁熔敷层多点同步测厚的爬壁机器人,属于锅炉水冷壁检测领域。本发明是为了解决水冷壁管厚度检测的面积大、位置分散、不方便测量给工作人员带来很大的困难的问题。本发明所述的一种锅炉水冷壁熔敷层多点同步测厚的爬壁机器人,同步带同时套接在压紧轮、从动轴和主动轴外侧,多个磁铁支架均匀固定在同步带外表面,磁铁支架为弹性支架,两个侧壁内侧均设有多个磁铁,利用磁铁支架上的多个磁铁吸附在水冷壁上,进而能够在锅炉水冷壁上沿管壁竖直方向自由行走,采集管子厚度,为后续记录下管子磨损情况提供数据。
用于流化床锅炉水冷壁的熔敷机器人及其熔敷方法.pdf
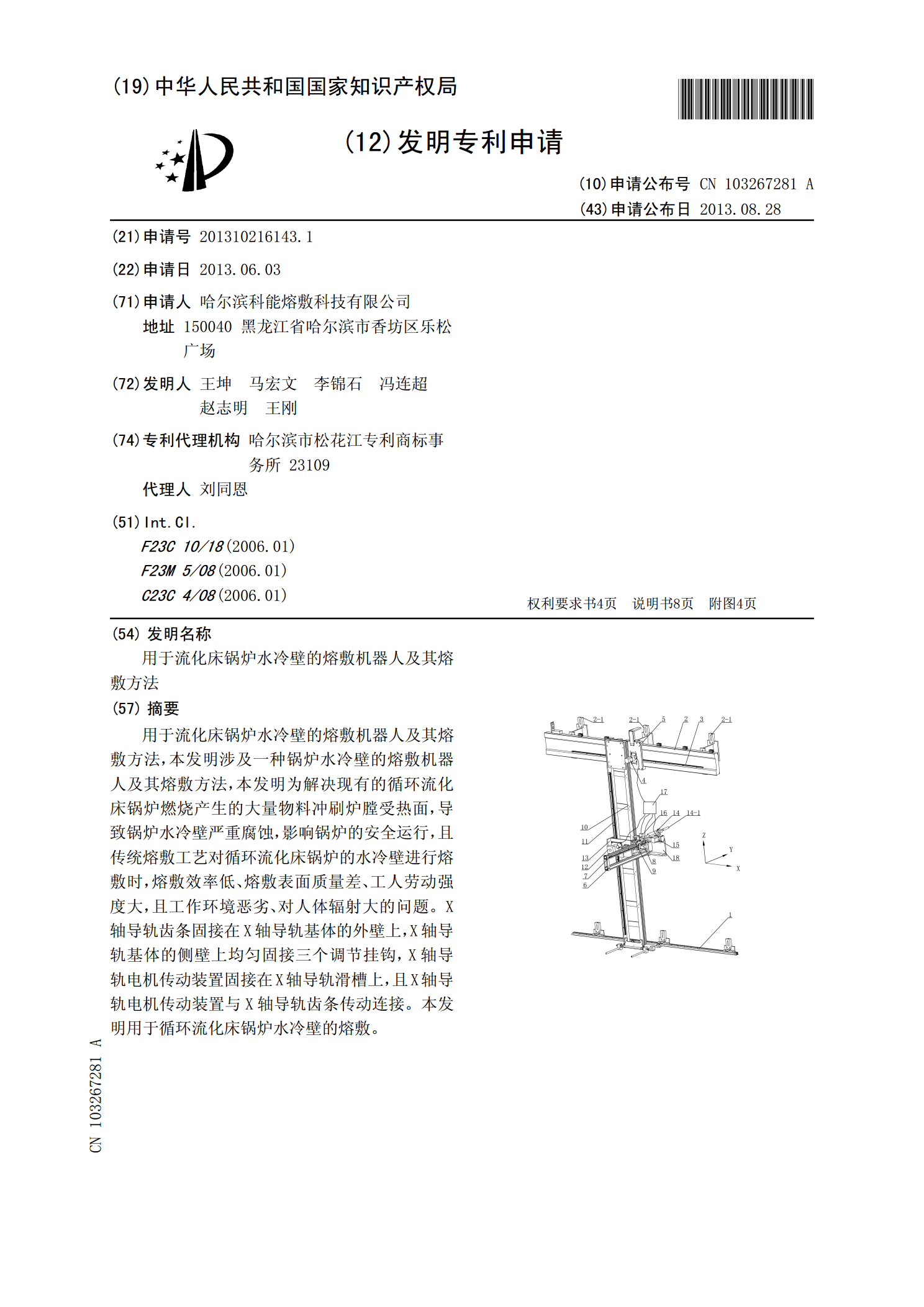
用于流化床锅炉水冷壁的熔敷机器人及其熔敷方法,本发明涉及一种锅炉水冷壁的熔敷机器人及其熔敷方法,本发明为解决现有的循环流化床锅炉燃烧产生的大量物料冲刷炉膛受热面,导致锅炉水冷壁严重腐蚀,影响锅炉的安全运行,且传统熔敷工艺对循环流化床锅炉的水冷壁进行熔敷时,熔敷效率低、熔敷表面质量差、工人劳动强度大,且工作环境恶劣、对人体辐射大的问题。X轴导轨齿条固接在X轴导轨基体的外壁上,X轴导轨基体的侧壁上均匀固接三个调节挂钩,X轴导轨电机传动装置固接在X轴导轨滑槽上,且X轴导轨电机传动装置与X轴导轨齿条传动连接。本发
利用数学建模多点同步测厚的水冷壁爬壁机器人.pdf
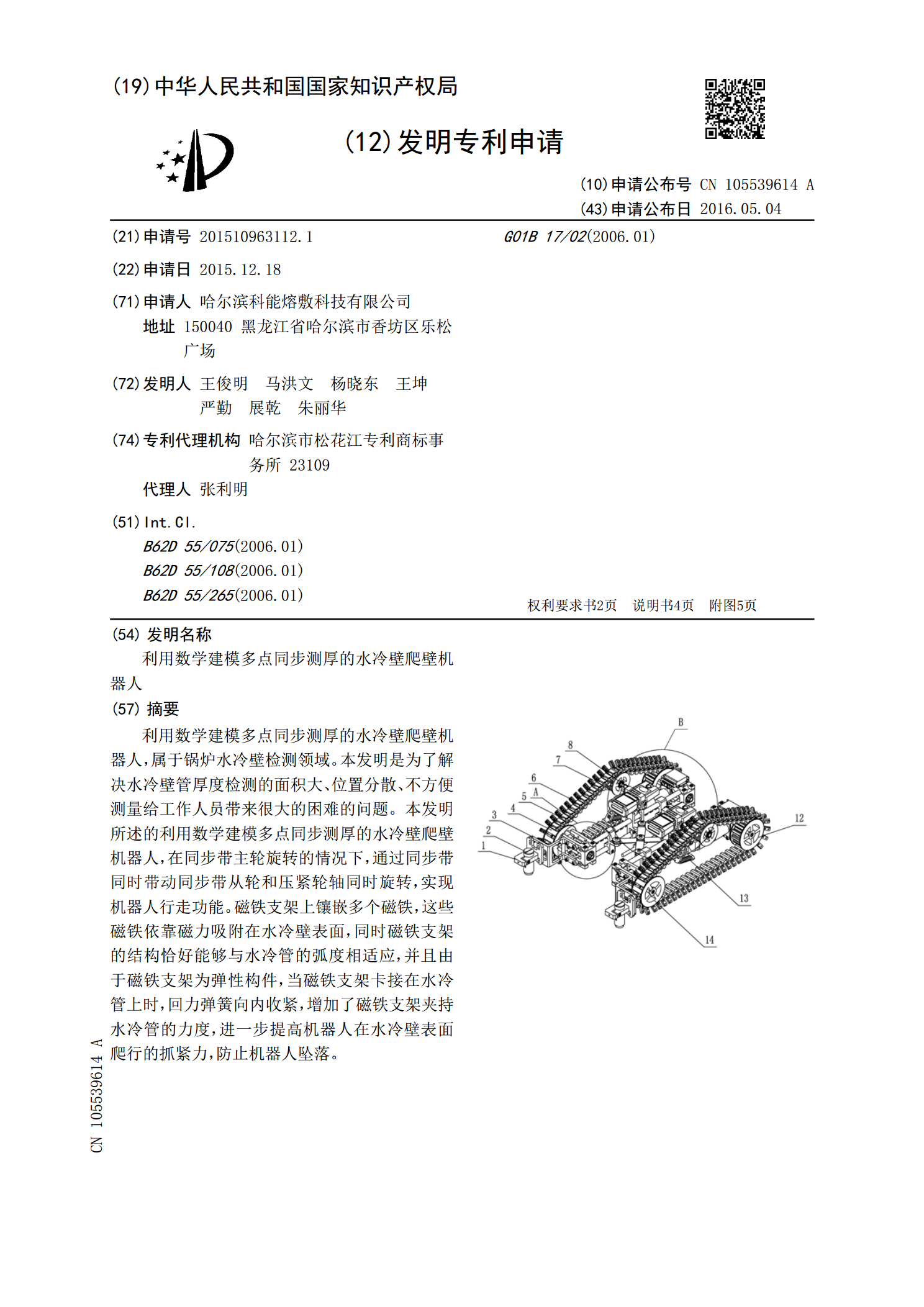
利用数学建模多点同步测厚的水冷壁爬壁机器人,属于锅炉水冷壁检测领域。本发明是为了解决水冷壁管厚度检测的面积大、位置分散、不方便测量给工作人员带来很大的困难的问题。本发明所述的利用数学建模多点同步测厚的水冷壁爬壁机器人,在同步带主轮旋转的情况下,通过同步带同时带动同步带从轮和压紧轮轴同时旋转,实现机器人行走功能。磁铁支架上镶嵌多个磁铁,这些磁铁依靠磁力吸附在水冷壁表面,同时磁铁支架的结构恰好能够与水冷管的弧度相适应,并且由于磁铁支架为弹性构件,当磁铁支架卡接在水冷管上时,回力弹簧向内收紧,增加了磁铁支架夹持