
一种定日镜跟踪控制装置及其跟踪控制方法.pdf

小沛****文章


1/10

2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种定日镜跟踪控制装置及其跟踪控制方法.pdf
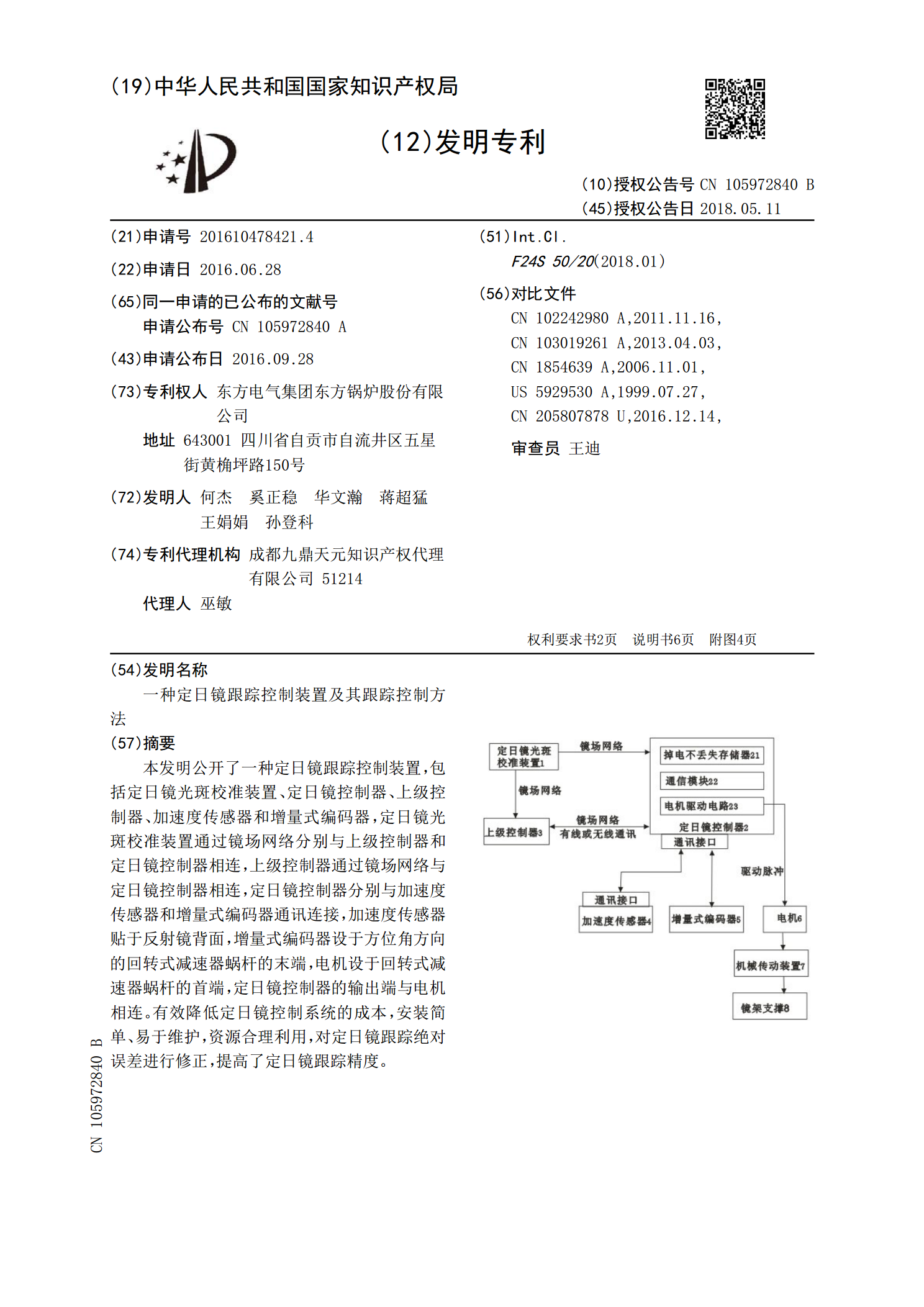
本发明公开了一种定日镜跟踪控制装置,包括定日镜光斑校准装置、定日镜控制器、上级控制器、加速度传感器和增量式编码器,定日镜光斑校准装置通过镜场网络分别与上级控制器和定日镜控制器相连,上级控制器通过镜场网络与定日镜控制器相连,定日镜控制器分别与加速度传感器和增量式编码器通讯连接,加速度传感器贴于反射镜背面,增量式编码器设于方位角方向的回转式减速器蜗杆的末端,电机设于回转式减速器蜗杆的首端,定日镜控制器的输出端与电机相连。有效降低定日镜控制系统的成本,安装简单、易于维护,资源合理利用,对定日镜跟踪绝对误差进行修

一种定日镜跟踪传动装置.pdf
一种定日镜跟踪传动装置,由方位传动机构(100)、俯仰传动机构(200)、传动箱体(5)和传动箱底座(6)构成;俯仰传动机构(200)位于上箱体(6)内;方位小齿轮(2‑1)固连在小齿轮轴(12)上,位于下箱体(8)内,方位回转装置(16)位于下箱体(8)内,方位回转装置(6)的内圈(10)与中间隔板(7)连接,作为方位回转装置(16)外圈的方位大齿轮(2‑2)与方位小齿轮(2‑1)啮合,传动箱底座(11)与方位大齿轮(2‑2)的下部固连;小齿轮轴上部轴径(15)位于上箱体(6)中,小齿轮轴轴径(15)上
塔式光热发电系统及其定日镜、跟踪驱动装置.pdf
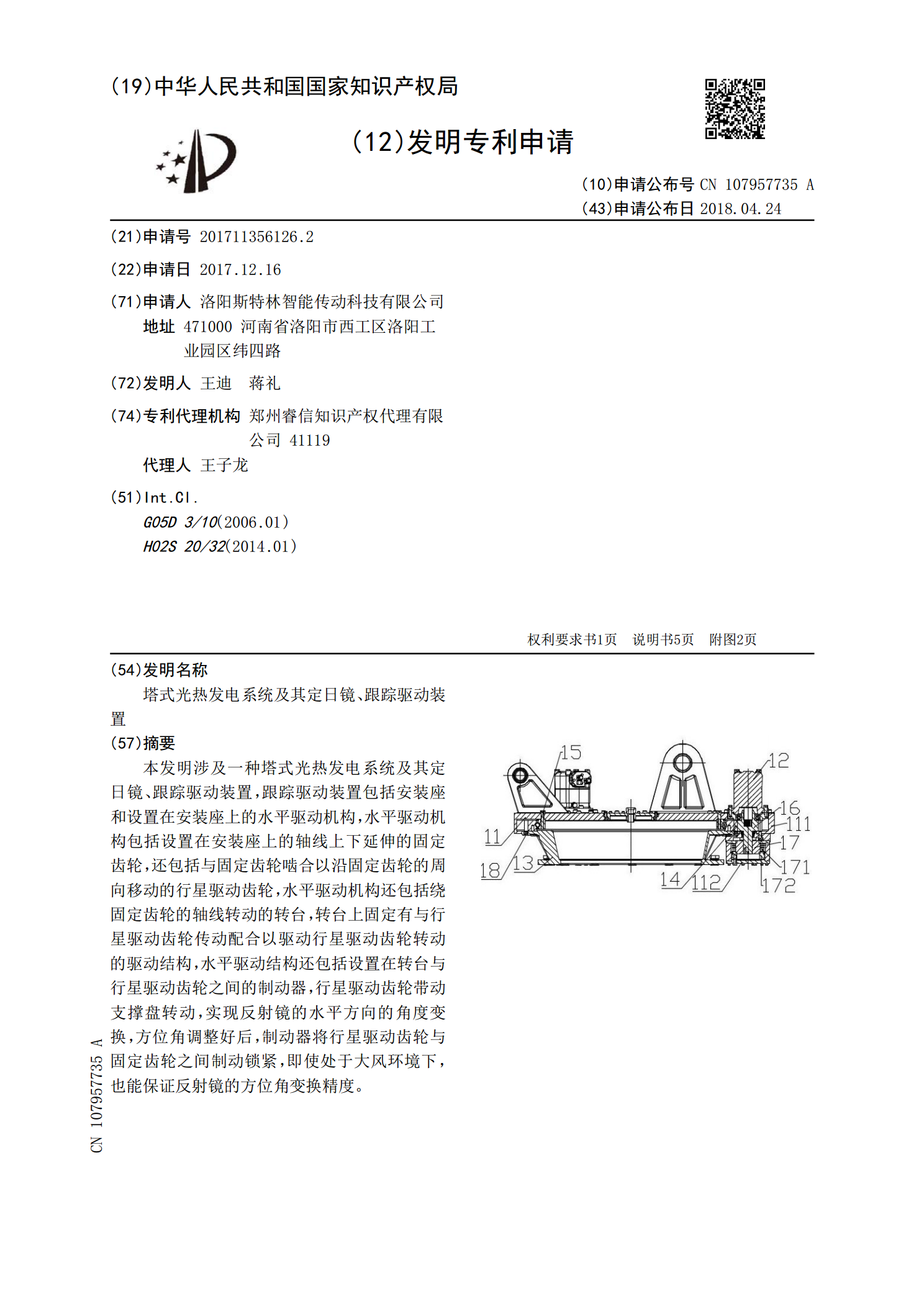
本发明涉及一种塔式光热发电系统及其定日镜、跟踪驱动装置,跟踪驱动装置包括安装座和设置在安装座上的水平驱动机构,水平驱动机构包括设置在安装座上的轴线上下延伸的固定齿轮,还包括与固定齿轮啮合以沿固定齿轮的周向移动的行星驱动齿轮,水平驱动机构还包括绕固定齿轮的轴线转动的转台,转台上固定有与行星驱动齿轮传动配合以驱动行星驱动齿轮转动的驱动结构,水平驱动结构还包括设置在转台与行星驱动齿轮之间的制动器,行星驱动齿轮带动支撑盘转动,实现反射镜的水平方向的角度变换,方位角调整好后,制动器将行星驱动齿轮与固定齿轮之间制动锁
定日镜、定日镜跟踪驱动装置及塔式光热发电系统.pdf
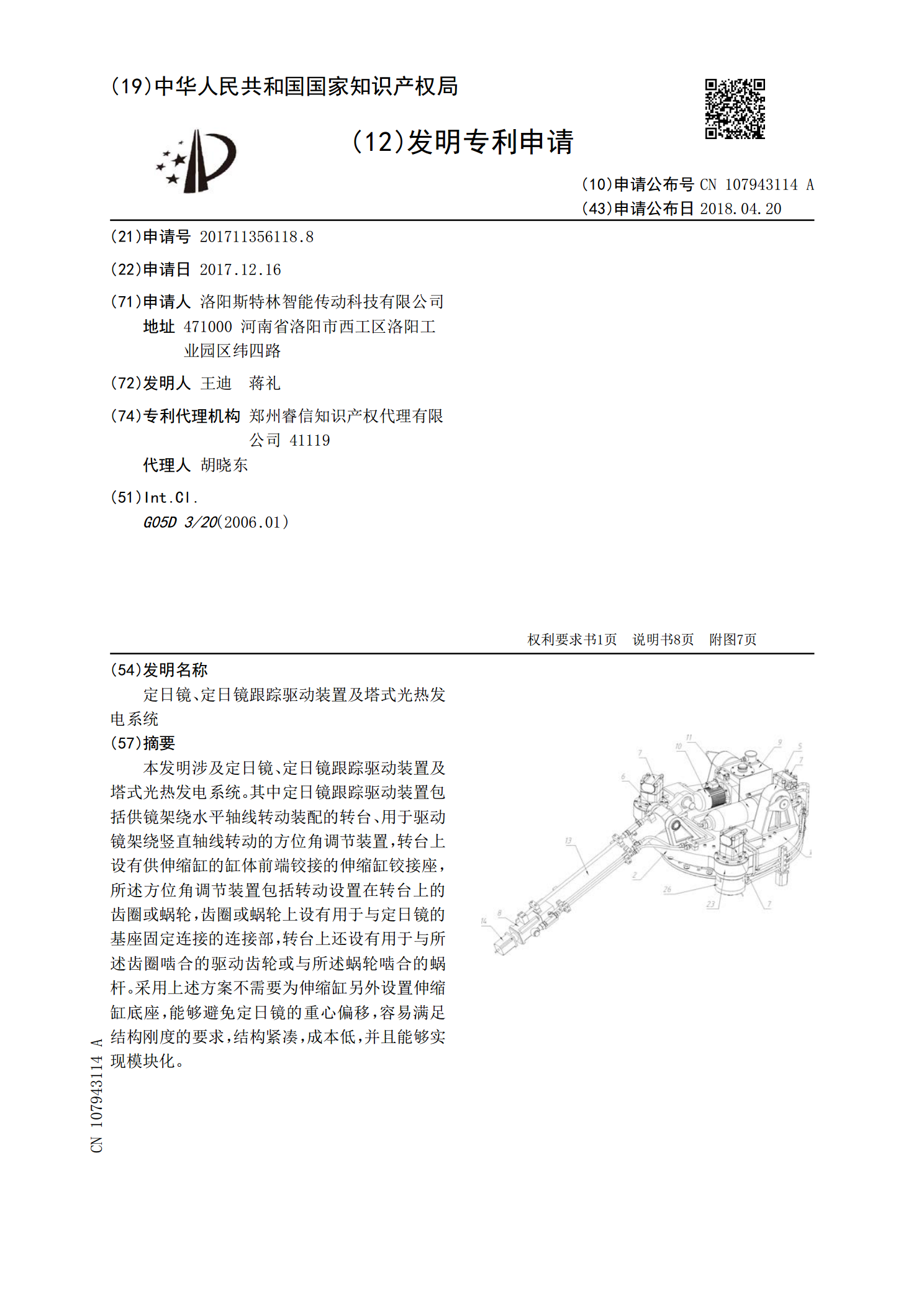
本发明涉及定日镜、定日镜跟踪驱动装置及塔式光热发电系统。其中定日镜跟踪驱动装置包括供镜架绕水平轴线转动装配的转台、用于驱动镜架绕竖直轴线转动的方位角调节装置,转台上设有供伸缩缸的缸体前端铰接的伸缩缸铰接座,所述方位角调节装置包括转动设置在转台上的齿圈或蜗轮,齿圈或蜗轮上设有用于与定日镜的基座固定连接的连接部,转台上还设有用于与所述齿圈啮合的驱动齿轮或与所述蜗轮啮合的蜗杆。采用上述方案不需要为伸缩缸另外设置伸缩缸底座,能够避免定日镜的重心偏移,容易满足结构刚度的要求,结构紧凑,成本低,并且能够实现模块化。

一种定日镜跟踪系统消隙装置.pdf
本发明涉及一种定日镜跟踪系统消隙装置,包括输入轴、输出轴和至少一消隙部件,输入轴与输出轴通过一齿轮副传动连接,齿轮副包括相互啮合的主动轮和从动轮,主动轮固定或连接于输入轴,从动轮固定或连接于输出轴,消隙部件与输入轴或/和输出轴连接,可消除齿轮副间的间隙。此消隙装置能自动消除齿轮间隙,并使齿轮磨损量得到补偿,保证了定日镜跟踪系统追日的精度和长久稳定性,并且,本消隙装置结构简单,调整方便,易于操作。