
汽包锅炉‑汽轮机组的模糊跟踪控制方法.pdf

曾琪****是我

1/10
2/10

3/10
4/10

5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共32页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
汽包锅炉‑汽轮机组的模糊跟踪控制方法.pdf
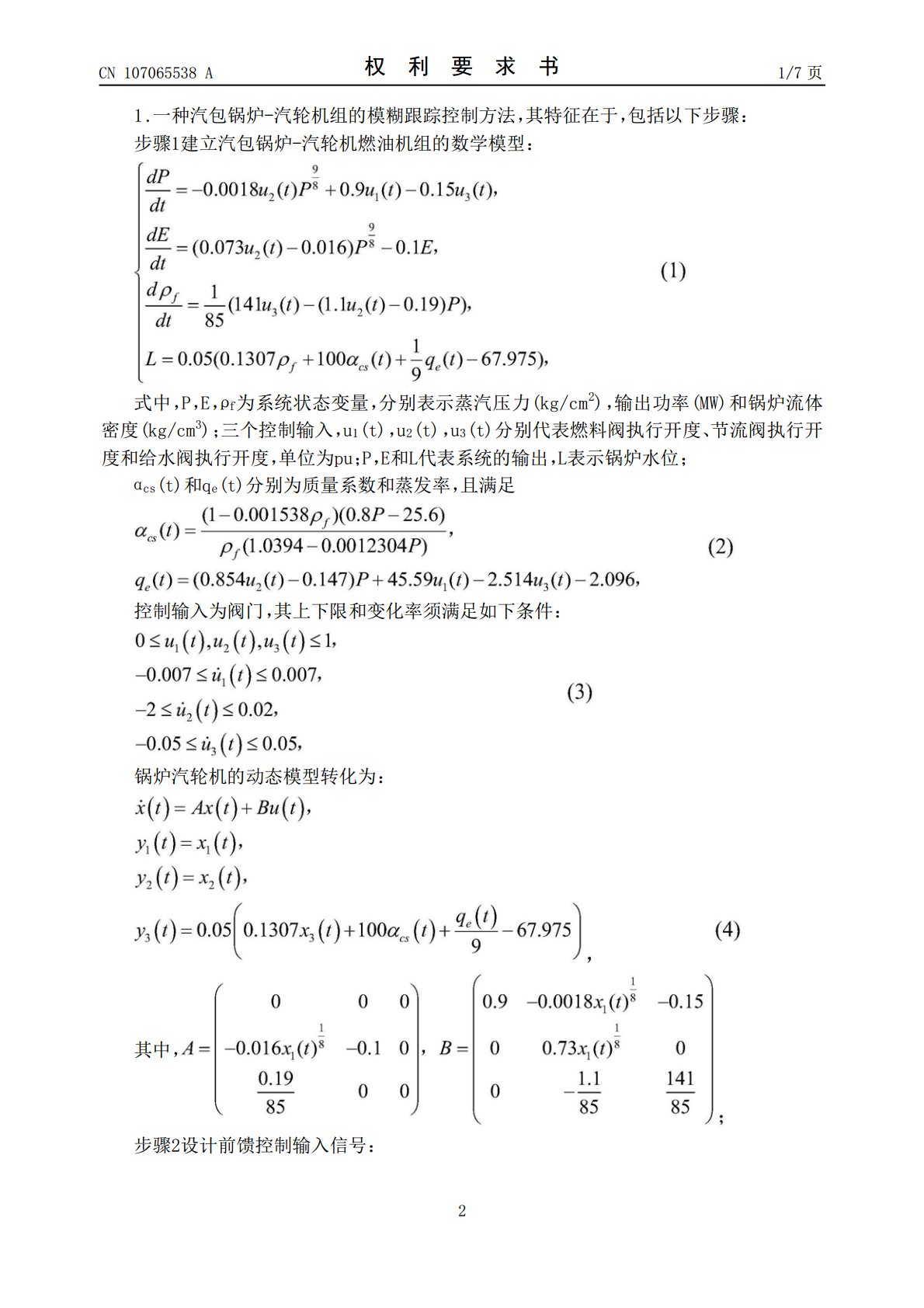
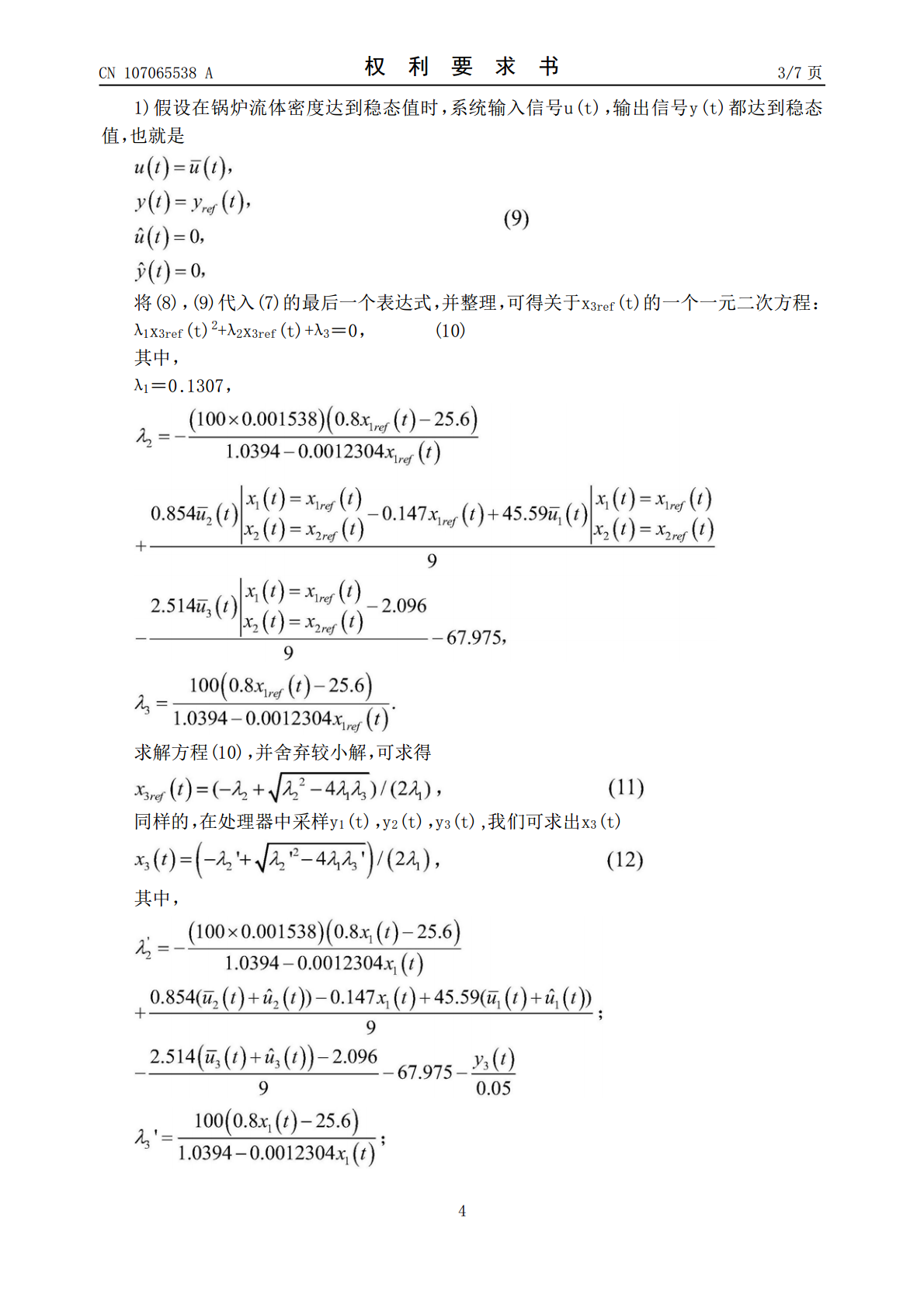
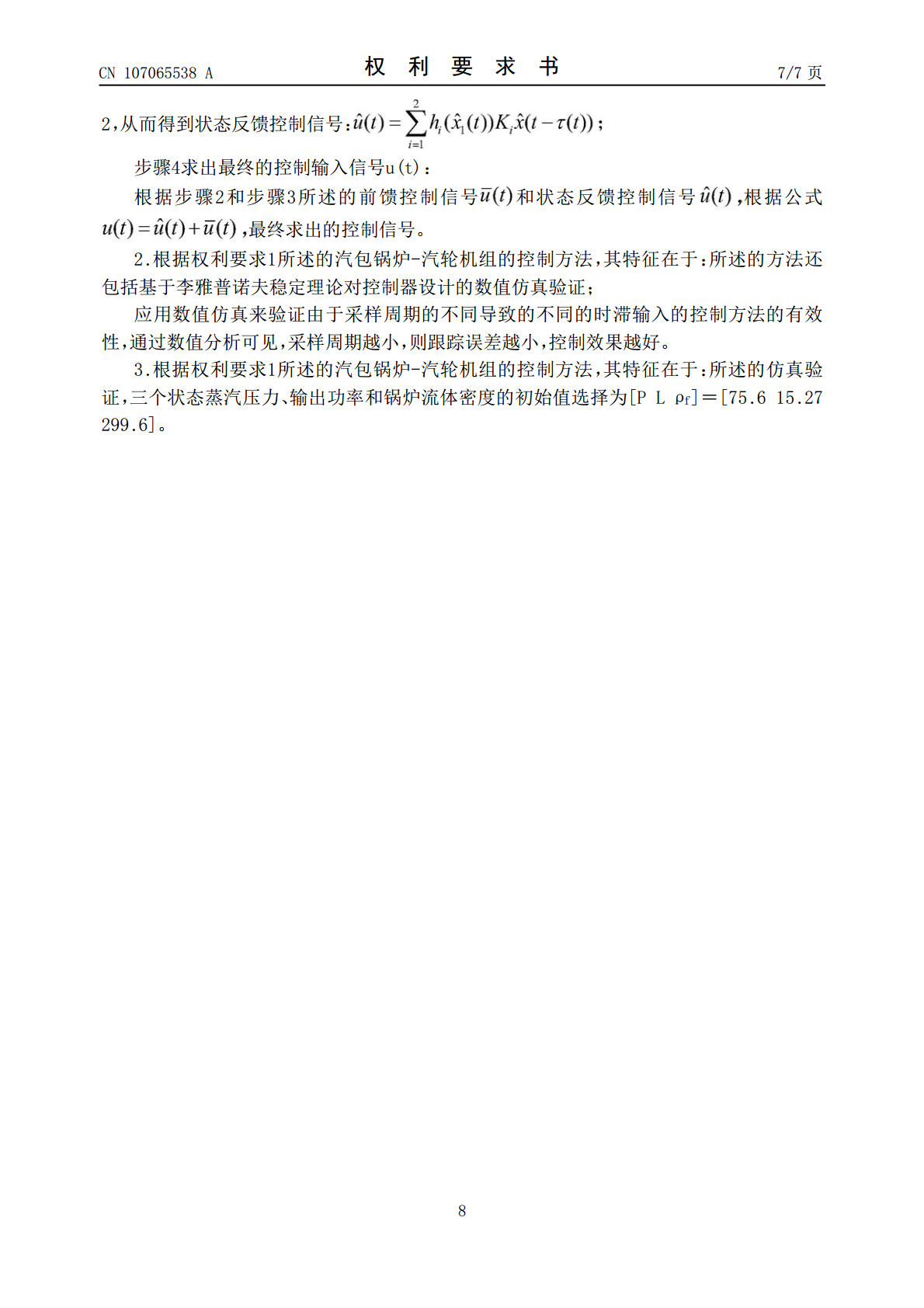
本发明公开了一种汽包锅炉‑汽轮机组的模糊跟踪控制方法。针对于汽包锅炉‑汽轮机系统的强耦合、非线性、严格的输入限制等问题,为了使整个系统能够快速跟踪设定值,提高控制系统的性能,并减少燃料的损耗,本发明基于前馈加反馈的控制思想,设计了一种模糊跟踪控制方法。前馈控制输入信号仅由跟踪目标决定,形式简单,易于实现,反馈控制输入环节加入一个处理器,得到了带时滞的模糊状态反馈控制器,提高了控制系统的实时性。该控制方法能够有效地提高机组的动态响应品质,快速地跟踪设定值,跟踪误差小,控制精度高,提高了经济效益。
基于模糊神经网络PID控制的锅炉汽包水位控制的方法.pdf
本发明提供一种基于模糊神经网络PID控制的锅炉汽包水位控制的方法,包括:分析锅炉汽包水位控制系统的特征与建模条件;对锅炉汽包水位控制系统的控制对象进行建模;在组态软件中完成所述模糊神经网络PID控制系统的各元件的开发;在组态软件中通过元件组态来实现锅炉汽包水位控制系统的控制逻辑;在组态软件中测试模糊神经网络PID控制系统对锅炉汽包水位的控制效果。本发明克服了传统PID控制的缺点,提高了控制系统的自适应能力;模糊神经网络PID控制算法以元件的方式集成在组态软件中,改善了控制策略与控制站的通信效率,大大地提高
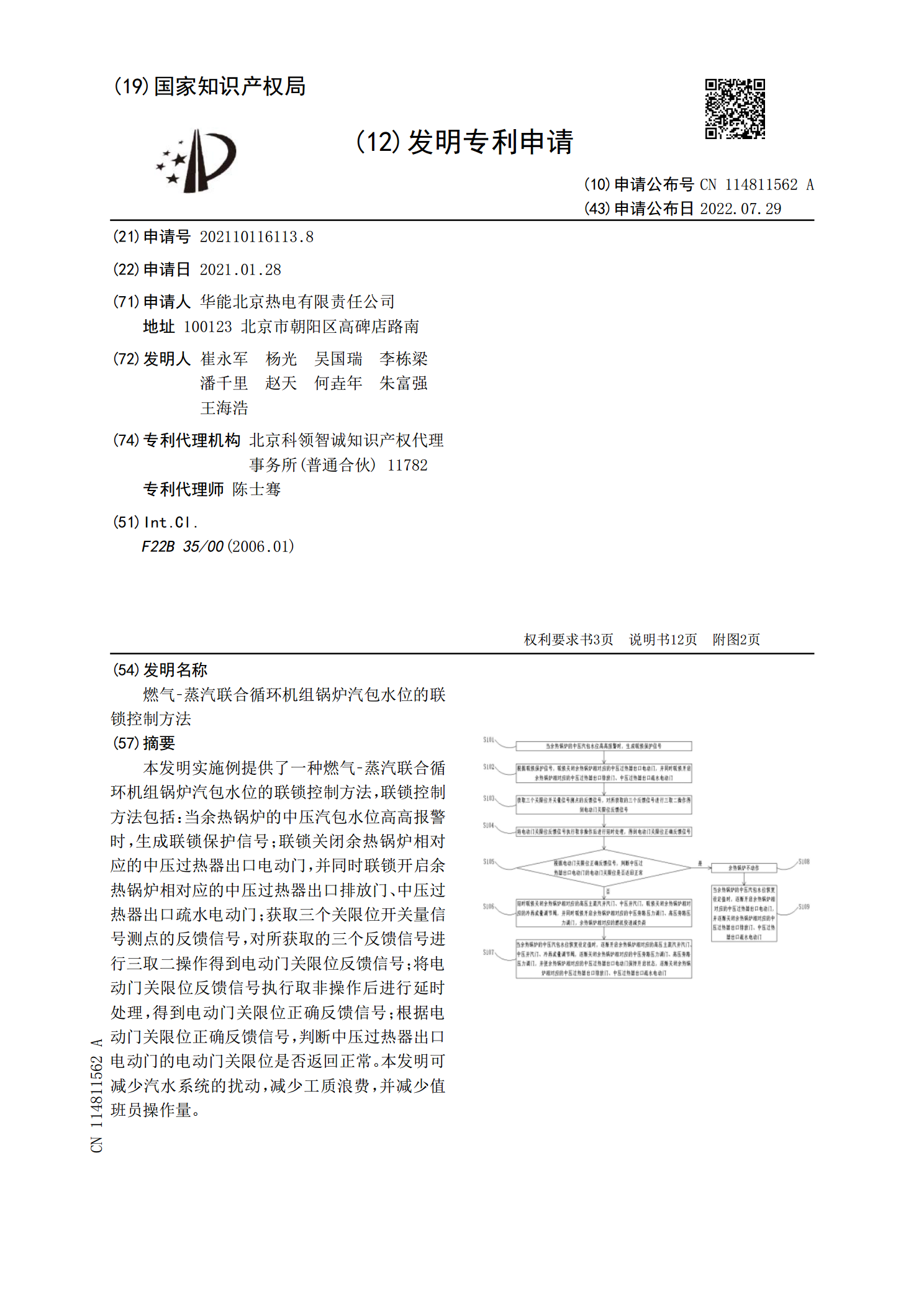
燃气–蒸汽联合循环机组锅炉汽包水位的联锁控制方法.pdf
本发明实施例提供了一种燃气–蒸汽联合循环机组锅炉汽包水位的联锁控制方法,联锁控制方法包括:当余热锅炉的中压汽包水位高高报警时,生成联锁保护信号;联锁关闭余热锅炉相对应的中压过热器出口电动门,并同时联锁开启余热锅炉相对应的中压过热器出口排放门、中压过热器出口疏水电动门;获取三个关限位开关量信号测点的反馈信号,对所获取的三个反馈信号进行三取二操作得到电动门关限位反馈信号;将电动门关限位反馈信号执行取非操作后进行延时处理,得到电动门关限位正确反馈信号;根据电动门关限位正确反馈信号,判断中压过热器出口电动门的电动

锅炉汽包水位的模糊控制系统的设计.doc
毕业设计(论文)原创性申明和使用授权阐明原创性申明本人郑重承诺:所呈交旳毕业设计(论文),是我个人在指导教师旳指导下进行旳研究工作及获得旳成果。尽我所知,除文中尤其加以标注和道谢旳地方外,不包括其他人或组织已经刊登或公布过旳研究成果,也不包括我为获得及其他教育机构旳学位或学历而使用过旳材料。对本研究提供过协助和做出过奉献旳个人或集体,均已在文中作了明确旳阐明并表达了谢意。作者签名:日期: 指导教师签名:日期:使用授权阐明本人完全理解大学有关搜集、保留、使用毕业设计(论文)旳规定,即:
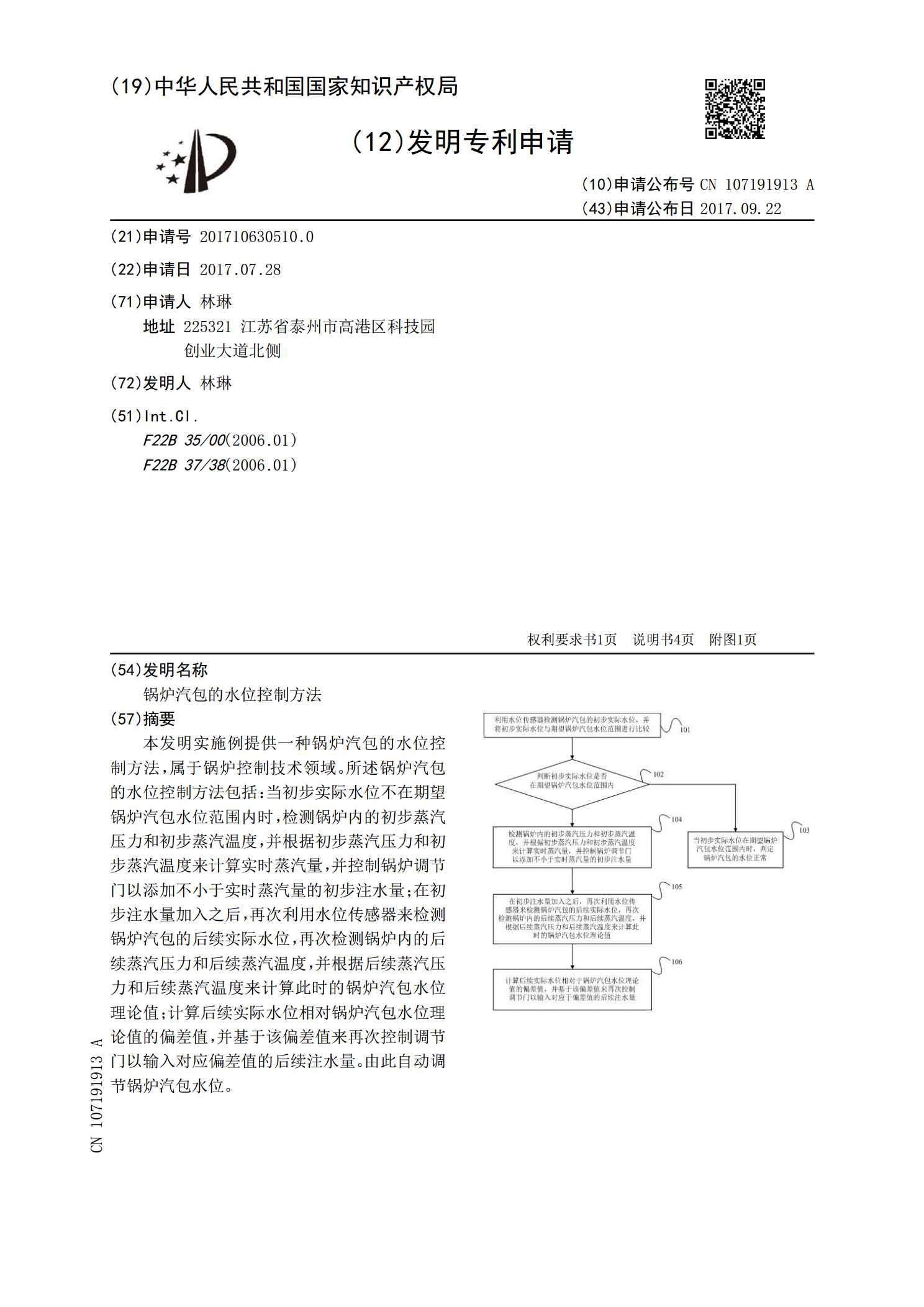
锅炉汽包的水位控制方法.pdf
本发明实施例提供一种锅炉汽包的水位控制方法,属于锅炉控制技术领域。所述锅炉汽包的水位控制方法包括:当初步实际水位不在期望锅炉汽包水位范围内时,检测锅炉内的初步蒸汽压力和初步蒸汽温度,并根据初步蒸汽压力和初步蒸汽温度来计算实时蒸汽量,并控制锅炉调节门以添加不小于实时蒸汽量的初步注水量;在初步注水量加入之后,再次利用水位传感器来检测锅炉汽包的后续实际水位,再次检测锅炉内的后续蒸汽压力和后续蒸汽温度,并根据后续蒸汽压力和后续蒸汽温度来计算此时的锅炉汽包水位理论值;计算后续实际水位相对锅炉汽包水位理论值的偏差值,