
一种基于神经网络解耦的矿热炉电极升降控制方法及系统.pdf

是浩****32

1/10

2/10
3/10

4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于神经网络解耦的矿热炉电极升降控制方法及系统.pdf
本发明公开了一种基于神经网络解耦的矿热炉电极升降控制方法及系统,该方法通过建立矿热炉电极电流‑位置解耦模型,基于RBF神经网络算法辨识出电极电流‑位置解耦模型中的广义外界干扰项,基于矿热炉电极电流‑位置解耦模型、广义外界干扰项以及跟踪误差,推导出电极升降位移量,跟踪误差为电极电流实时值与电极电流设定值的偏差以及基于电极升降位移量控制矿热炉电极升降,解决了矿热炉生产过程中由于存在严重的耦合作用和随机干扰,导致电极控制不稳定,进而出现产品质量不稳定以及耗电量增加的技术问题,且通过对系统进行实时解耦能获得精准的
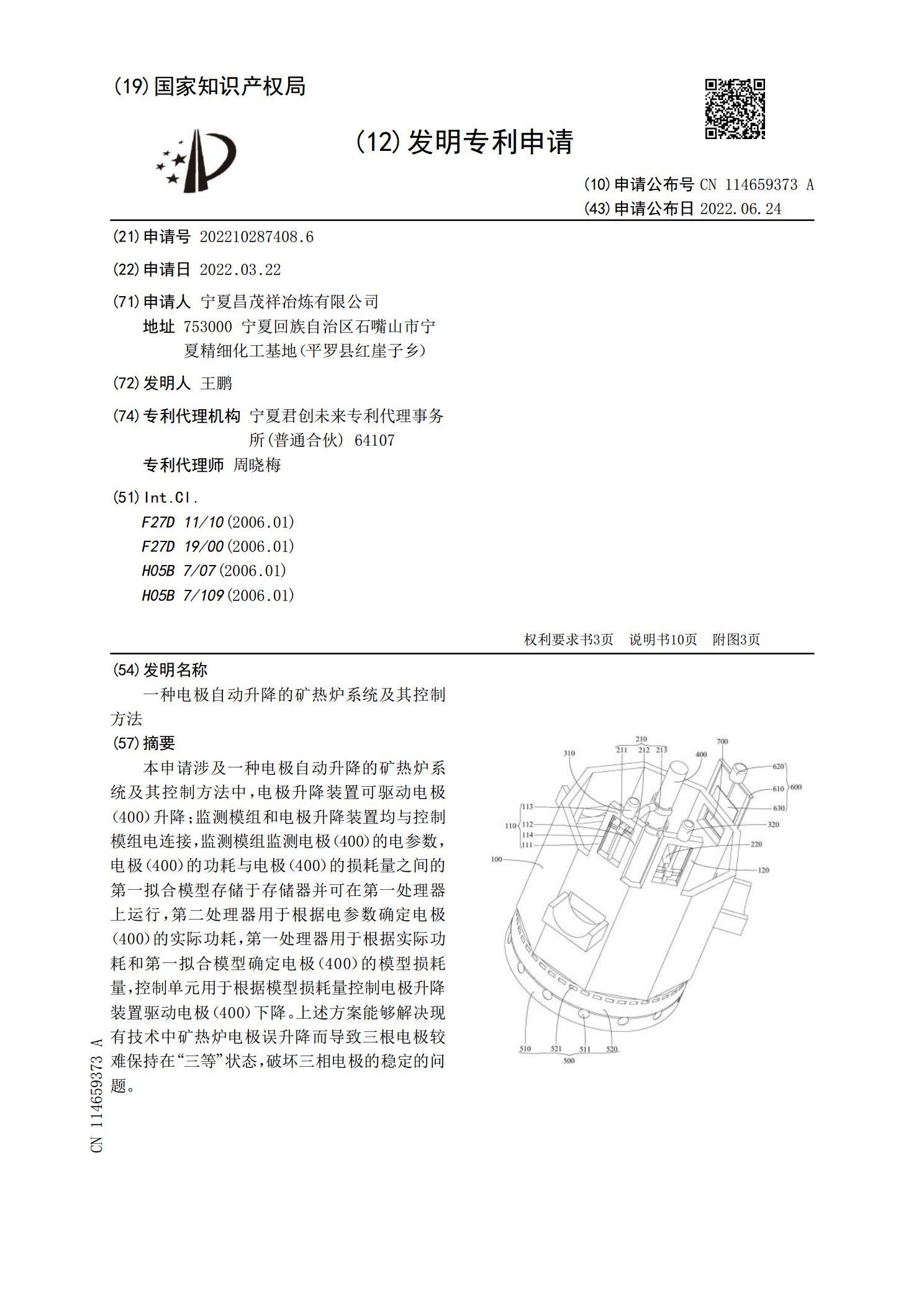
一种电极自动升降的矿热炉系统及其控制方法.pdf
本申请涉及一种电极自动升降的矿热炉系统及其控制方法中,电极升降装置可驱动电极(400)升降;监测模组和电极升降装置均与控制模组电连接,监测模组监测电极(400)的电参数,电极(400)的功耗与电极(400)的损耗量之间的第一拟合模型存储于存储器并可在第一处理器上运行,第二处理器用于根据电参数确定电极(400)的实际功耗,第一处理器用于根据实际功耗和第一拟合模型确定电极(400)的模型损耗量,控制单元用于根据模型损耗量控制电极升降装置驱动电极(400)下降。上述方案能够解决现有技术中矿热炉电极误升降而导致三
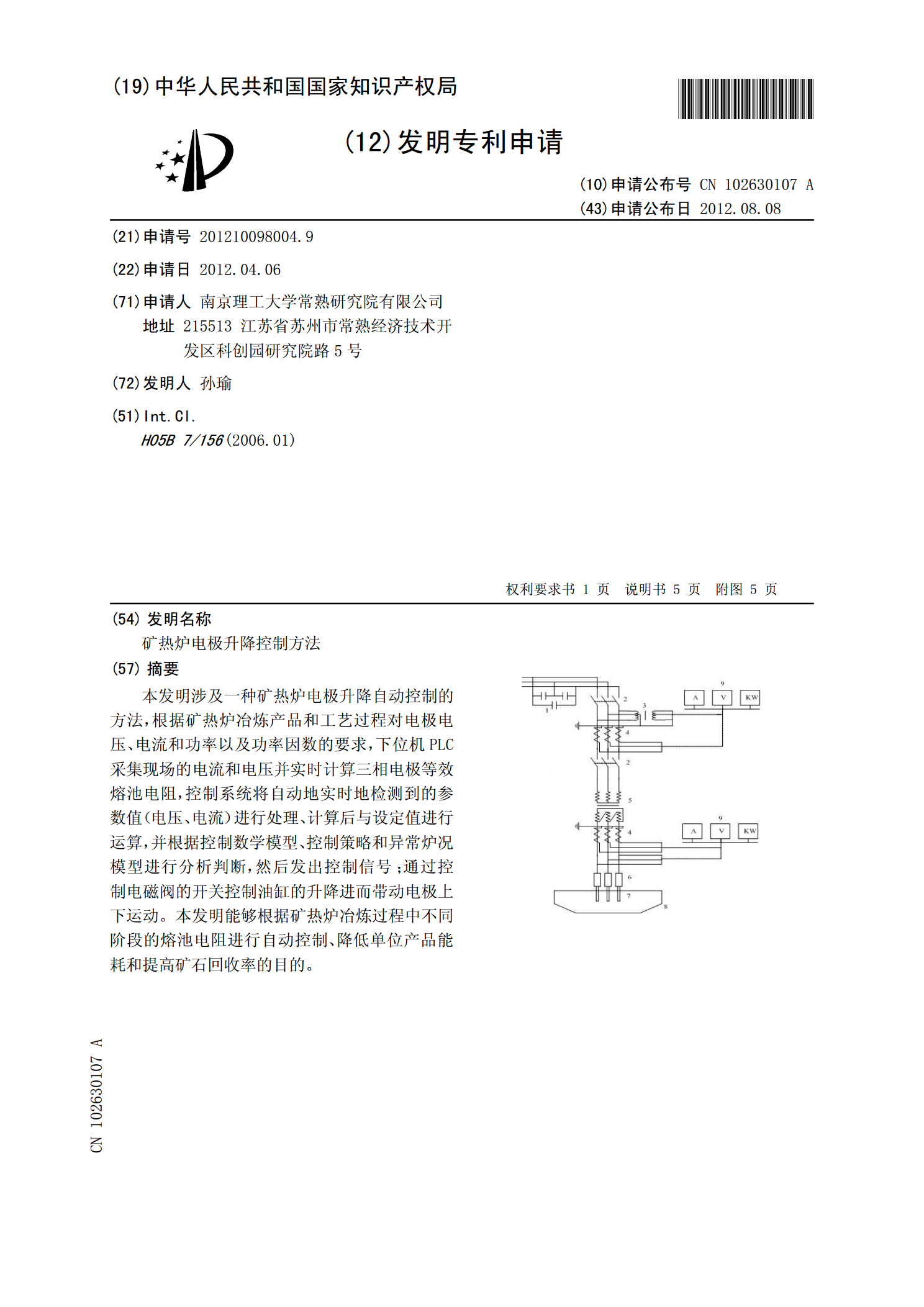
矿热炉电极升降控制方法.pdf
本发明涉及一种矿热炉电极升降自动控制的方法,根据矿热炉冶炼产品和工艺过程对电极电压、电流和功率以及功率因数的要求,下位机PLC采集现场的电流和电压并实时计算三相电极等效熔池电阻,控制系统将自动地实时地检测到的参数值(电压、电流)进行处理、计算后与设定值进行运算,并根据控制数学模型、控制策略和异常炉况模型进行分析判断,然后发出控制信号;通过控制电磁阀的开关控制油缸的升降进而带动电极上下运动。本发明能够根据矿热炉冶炼过程中不同阶段的熔池电阻进行自动控制、降低单位产品能耗和提高矿石回收率的目的。

基于神经网络逆系统的活套解耦控制方法研究.docx
基于神经网络逆系统的活套解耦控制方法研究基于神经网络逆系统的活套解耦控制方法研究摘要:在现代工业控制系统中,多变量系统的解耦控制一直是一个重要的研究方向。本文提出了一种基于神经网络逆系统的活套解耦控制方法。该方法通过神经网络逆系统对复杂的多变量系统进行建模,并通过设计逆控制器实现解耦控制。实验结果表明,该方法能够有效地解耦系统,并提高系统的控制性能。关键词:神经网络,逆系统,活套,解耦控制,多变量系统引言:多变量系统的解耦控制是实现工业过程控制的重要问题之一。在多变量系统中,不同的输入及其互相之间的影响会
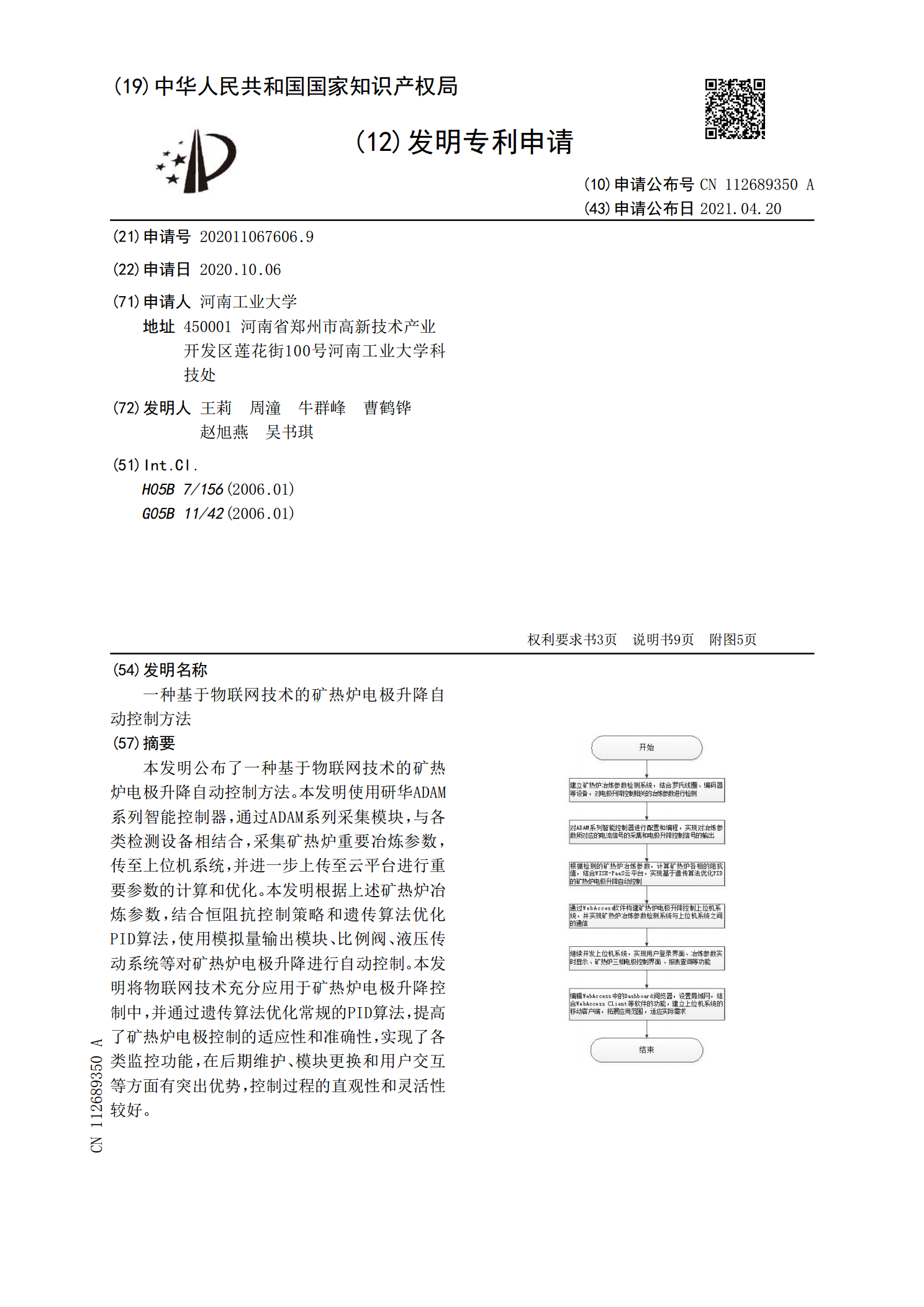
一种基于物联网技术的矿热炉电极升降自动控制方法.pdf
本发明公布了一种基于物联网技术的矿热炉电极升降自动控制方法。本发明使用研华ADAM系列智能控制器,通过ADAM系列采集模块,与各类检测设备相结合,采集矿热炉重要冶炼参数,传至上位机系统,并进一步上传至云平台进行重要参数的计算和优化。本发明根据上述矿热炉冶炼参数,结合恒阻抗控制策略和遗传算法优化PID算法,使用模拟量输出模块、比例阀、液压传动系统等对矿热炉电极升降进行自动控制。本发明将物联网技术充分应用于矿热炉电极升降控制中,并通过遗传算法优化常规的PID算法,提高了矿热炉电极控制的适应性和准确性,实现了各