
CATIA_斜齿轮教程.pdf

as****16

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
CATIA_斜齿轮教程.pdf
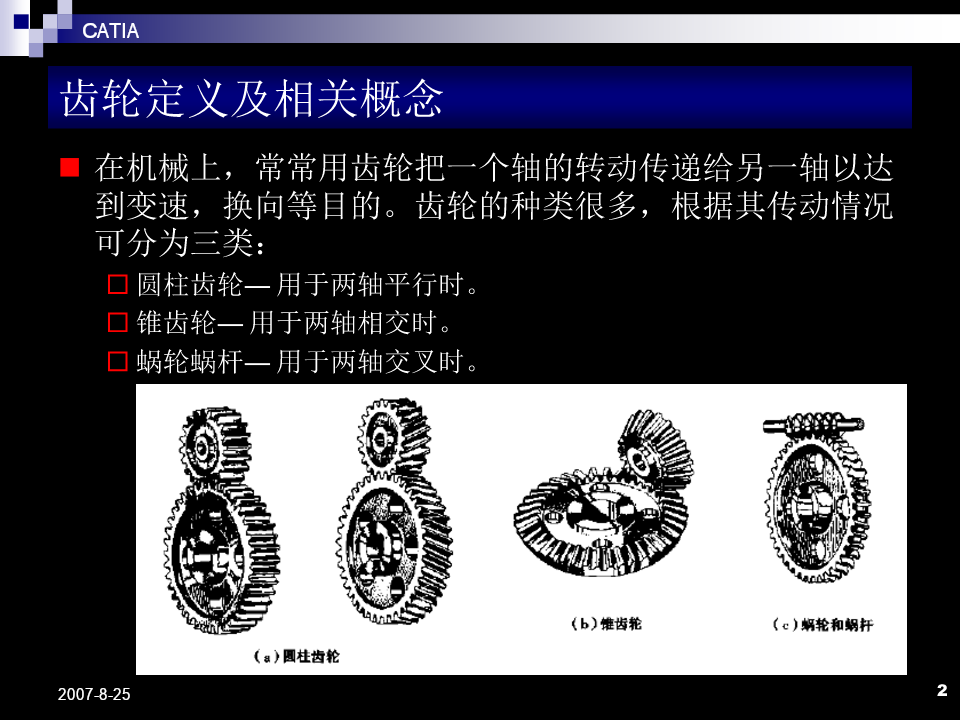
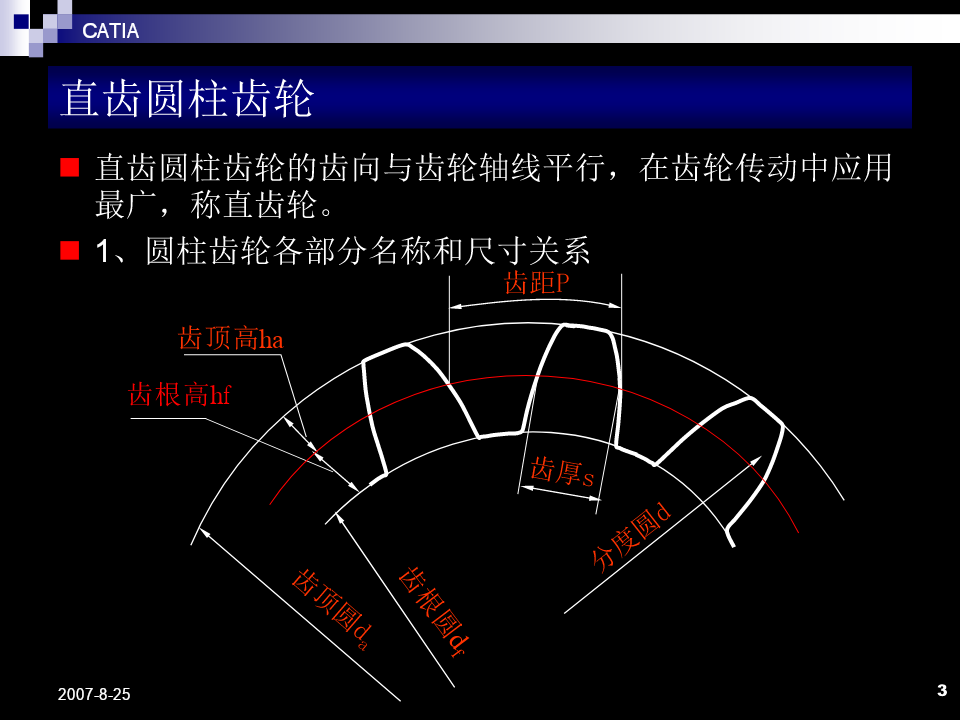
CATIAEx:斜齿圆柱齿轮(教程)目的知识工程中参数、公式、fog及设计表的用法。创成式曲面曲线中关于曲线的操作。1CATIA齿轮定义及相关概念在机械上,常常用齿轮把一个轴的转动传递给另一轴以达到变速,换向等目的。齿轮的种类很多,根据其传动情况可分为三类:圆柱齿轮―用于两轴平行时。锥齿轮―用于两轴相交时。蜗轮蜗杆―用于两轴交叉时。2007-8-252CATIA直齿圆柱齿轮直齿圆柱齿轮的齿向与齿轮轴线平行,在齿轮传动中应用最广,称直齿轮。1、圆柱齿轮各部分名称和尺寸关系齿距P齿顶高ha齿

斜齿轮教程2.doc
步骤6:创建圆柱体单击(拉伸工具)按钮,打开拉伸工具操控板。在拉伸工具操控板中指定要创建的模型特征为(实体)。打开拉伸工具操控板中的“放置”上滑面板,单击“定义”按钮,弹出“草绘”对话框。选择TOP平面作为草绘平面,默认以RIGHT平面作为“右”方向参照,单击“草绘”按钮进入草绘模式。(通过边创建图元)按钮,由齿顶圆复制而创建一个相同的圆,单击(继续当前部分)按钮。在拉伸工具操控板中单击选择对称按钮,输入拉伸深度为B。B为之前建立的参数,其初始值为58.单击操控板中的(完成)按钮,如图4-57所示。图4-

CATIA____斜齿轮教程.ppt
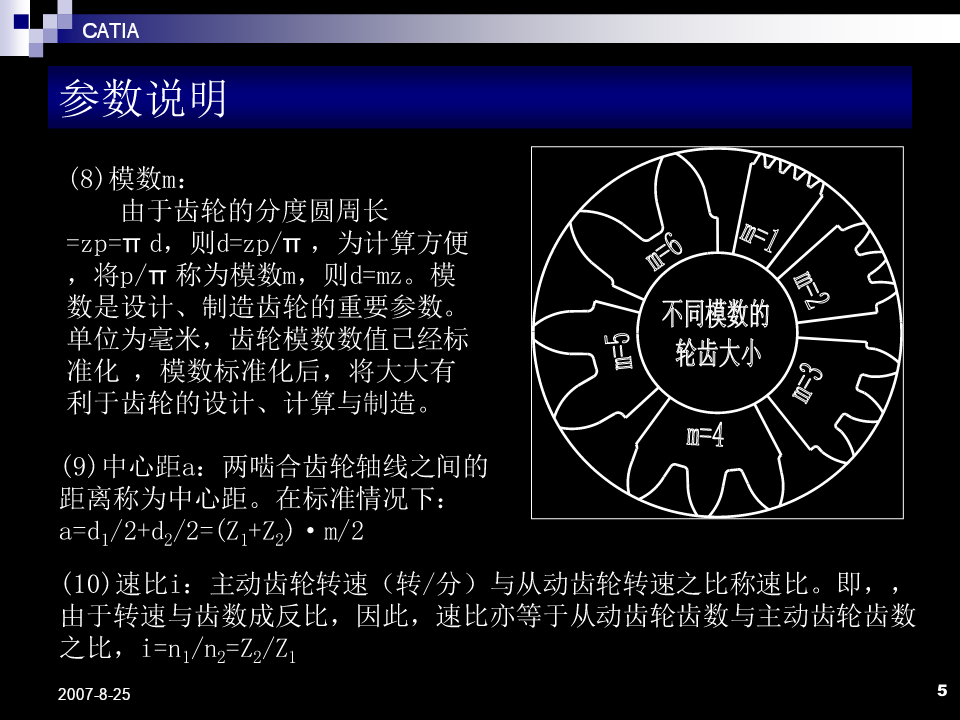
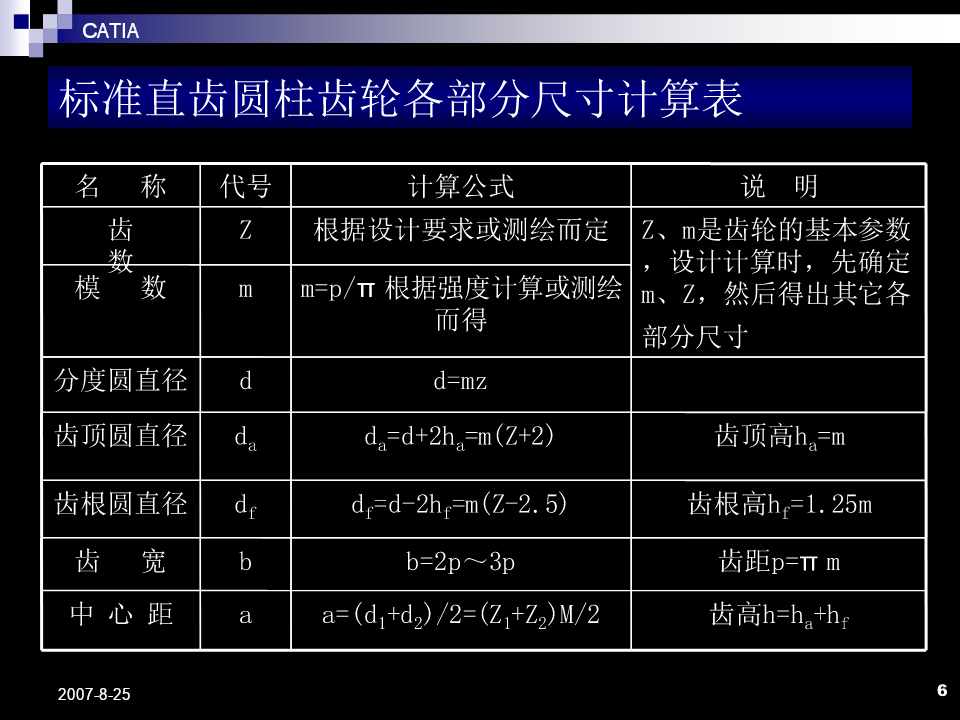
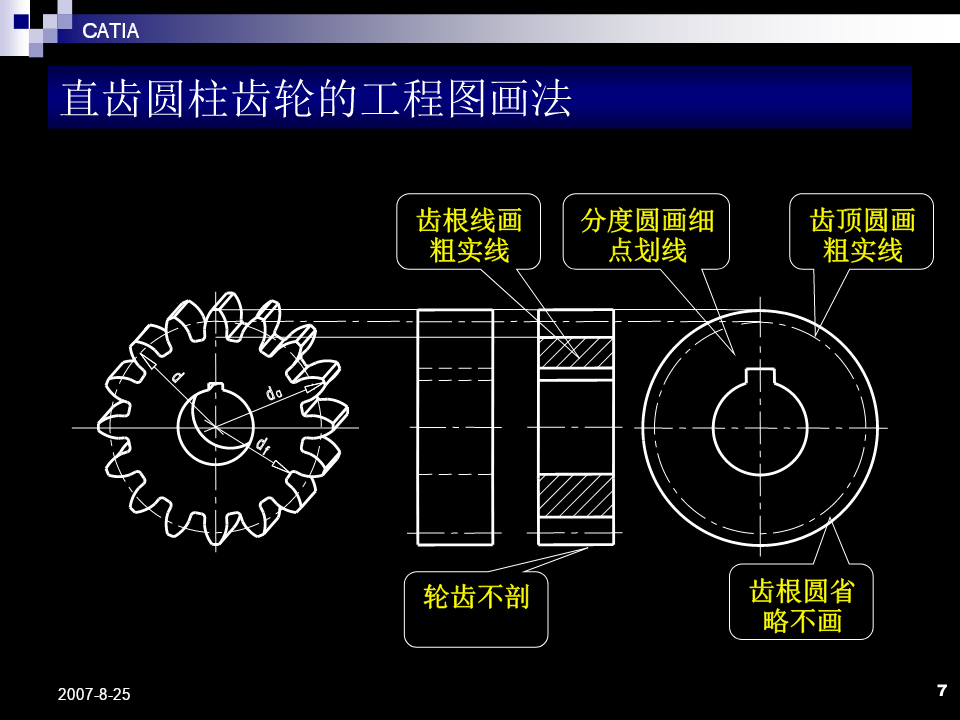
CATIAEx:斜齿圆柱齿轮(教程)齿轮定义及相关概念直齿圆柱齿轮参数说明参数说明标准直齿圆柱齿轮各部分尺寸计算表直齿圆柱齿轮的工程图画法在建模中斜齿轮和直齿轮的不同:可简单的理解为齿廓沿螺旋线、直线扫掠所得的不同结果Fog参数方程创建渐开线曲线渐开线做成-1(近似)渐开线做成-2(精确)齿廓曲线做成螺旋线做成下面将“工作对象”定义到零件设计中最终做成

CATIA_钣金教程.ppt
CATIA钣金设计(GenerativeSheetmetalDesign)功能入门示例步骤1、2步骤3、4步骤5、6钣金参数K因子创建壁生成壁创建边缘壁折弯(仅对直壁起作用)从壁创建折弯创建锥形折弯从线创建折弯局部折弯折叠拉伸钣金件CreateRolledWalls管形壁创建类锥面钣金(仅能作为第一个特征创建)创建扫掠壁CreateSweepWalls创建凸缘(边沿)CreatingaFlange创建自定义凸缘CreatingaUserFlange钣金件切除操作冲压特征创建Stamp冲压标准特征冲压开口凸

catia画渐开线斜齿轮详细教程.doc
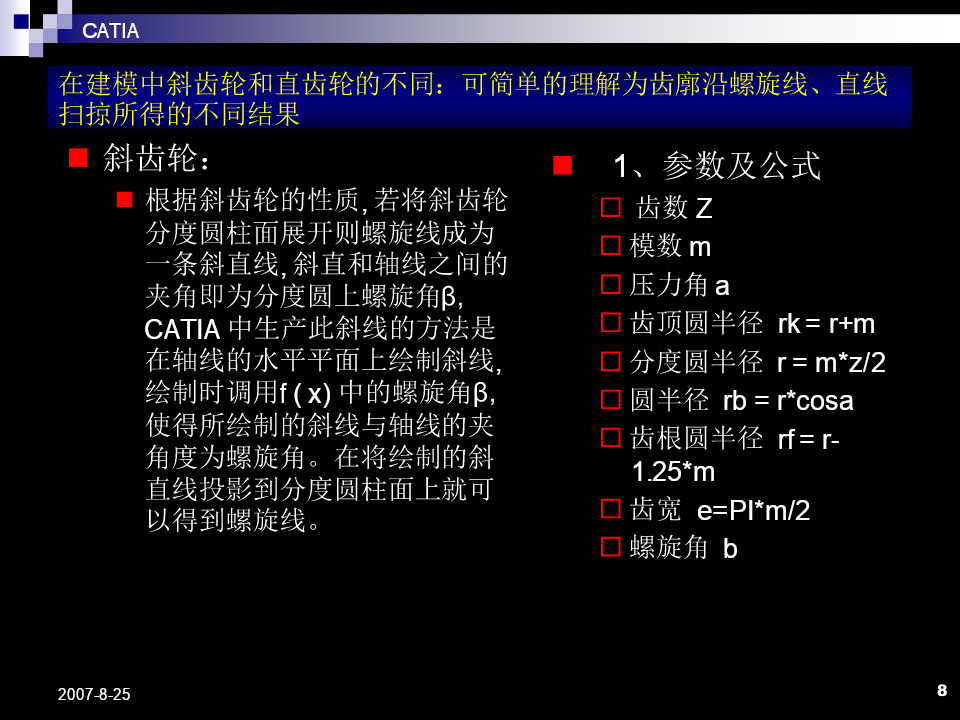
CATIA画渐开线斜齿轮教程首先打开CATIA,开始——形状——创成式外形设计。设置:工具——选项——显示。注意:基础设计——零件基础结构——显示。勾选选中项。输入齿轮的各项参数斜齿圆柱齿轮中有如下参数及参数关系,不涉及法向参数齿数z(本次z取28)模数m(本次m取3)压力角a(本次a取20°)齿顶圆半径rk=r+m分度圆半径r=m*z/2基圆半径rb=r*cosa齿根圆半径rf=r-1.25*m螺旋角beta(本次取18°)齿厚depth(本次取30mm)输入方法如下:选取公式。输入数值,depth=3