
Catia链轮链条仿真运动教程.pdf

qw****27

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
Catia链轮链条仿真运动教程.pdf
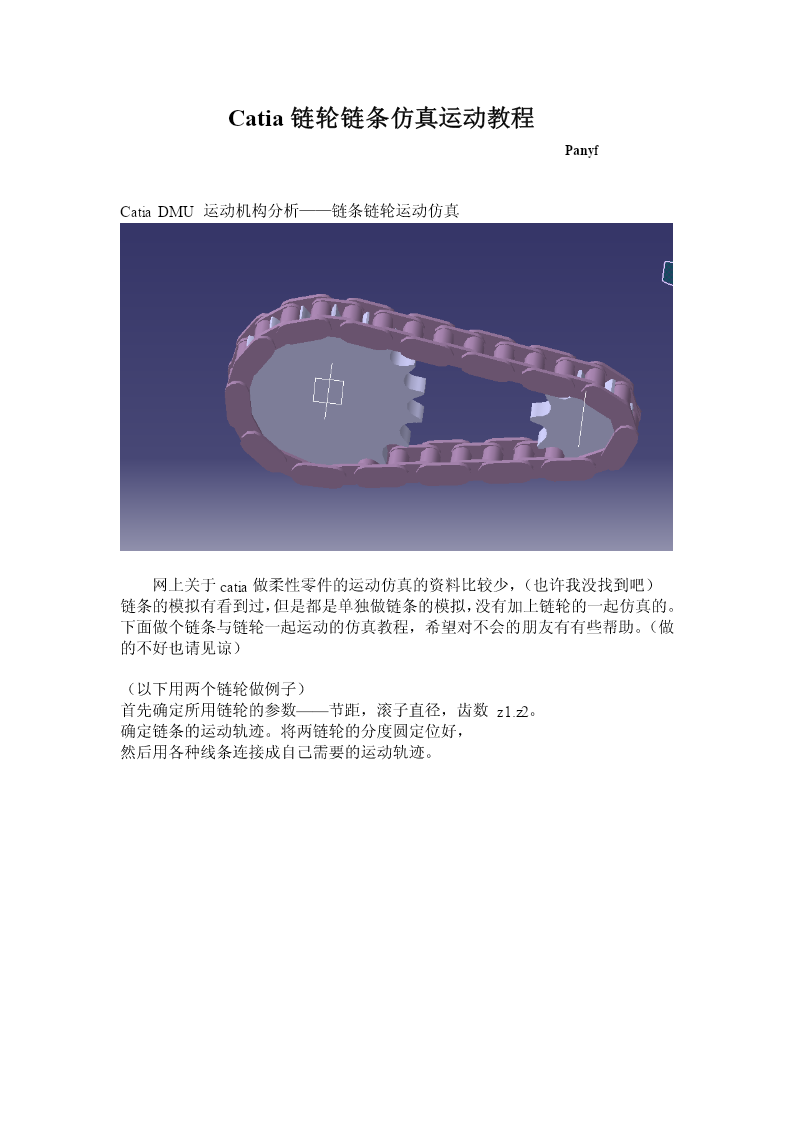
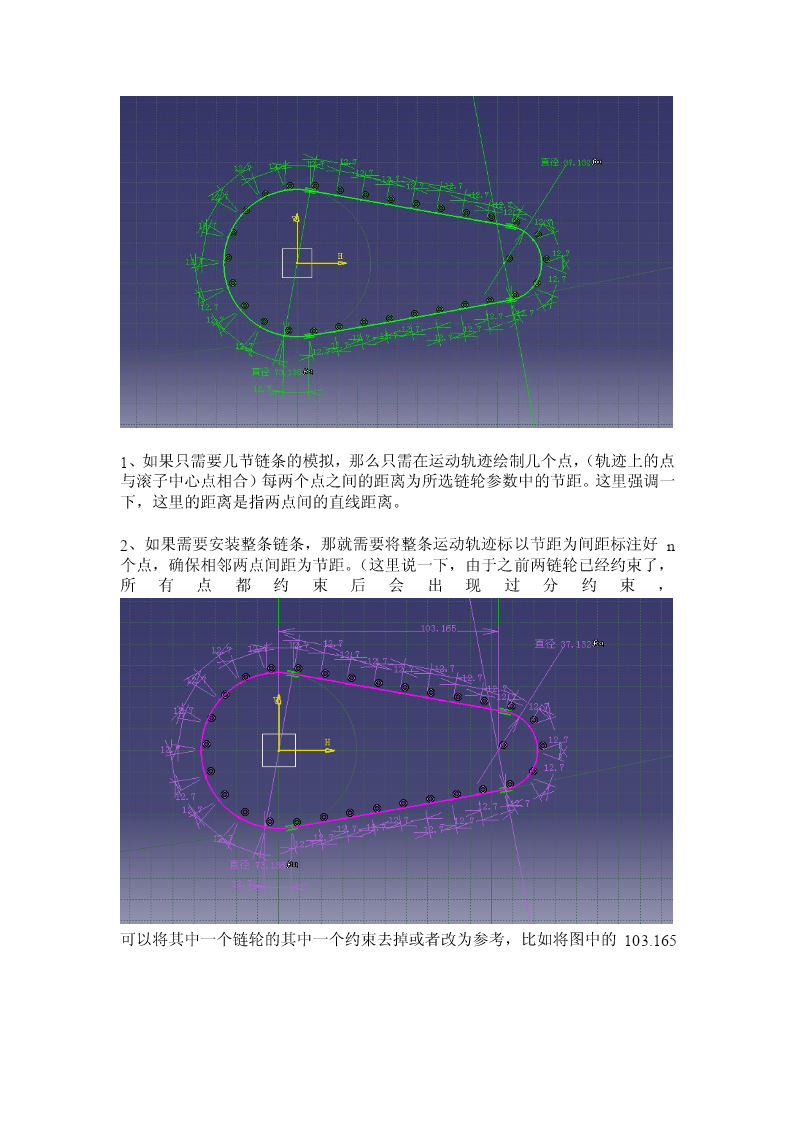
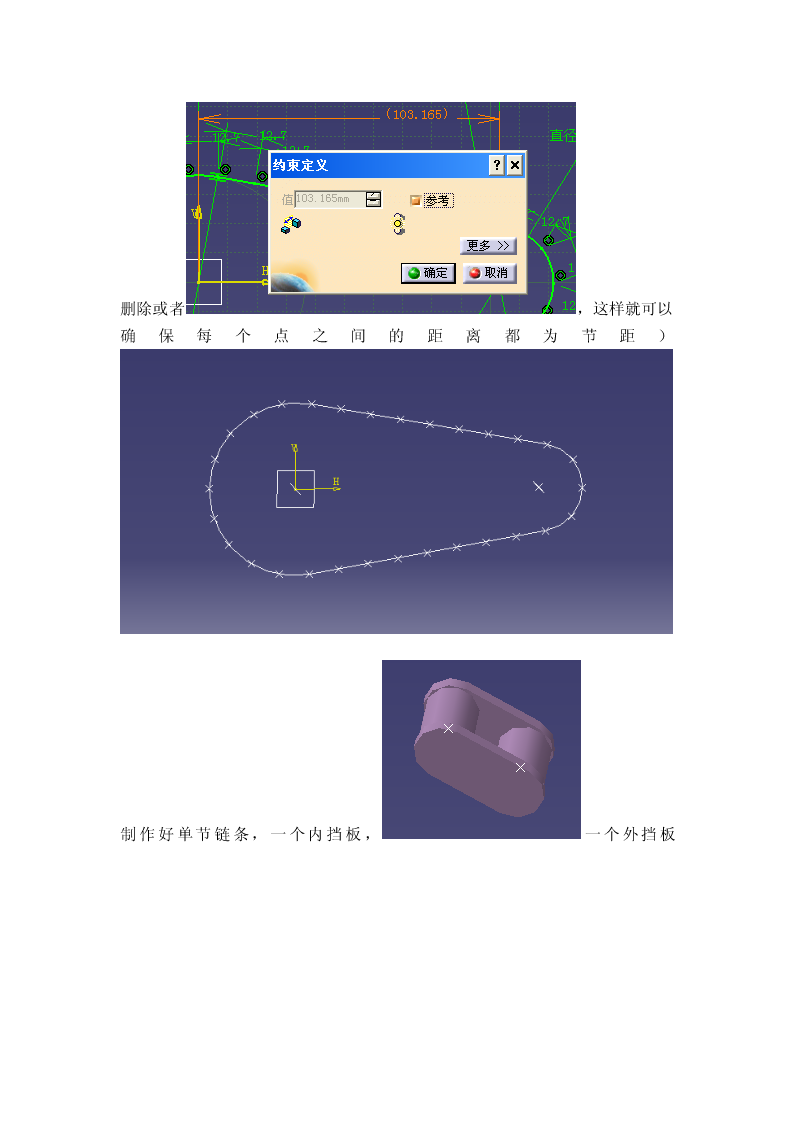
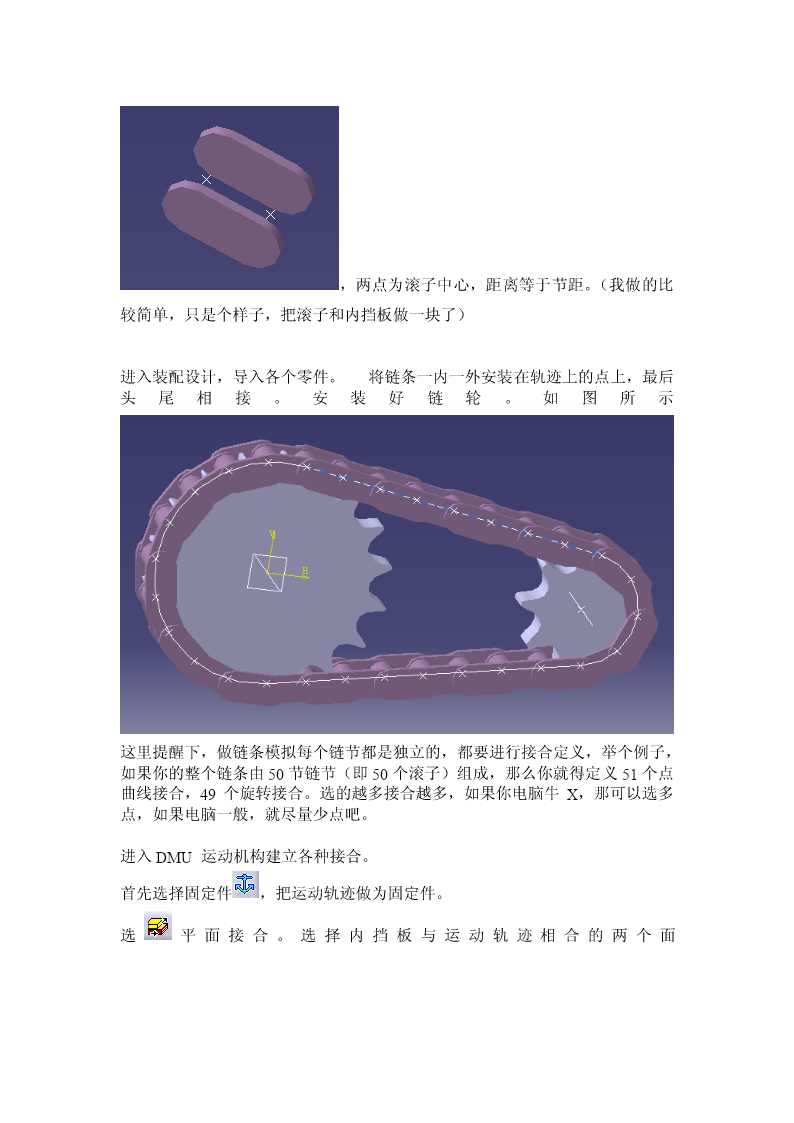
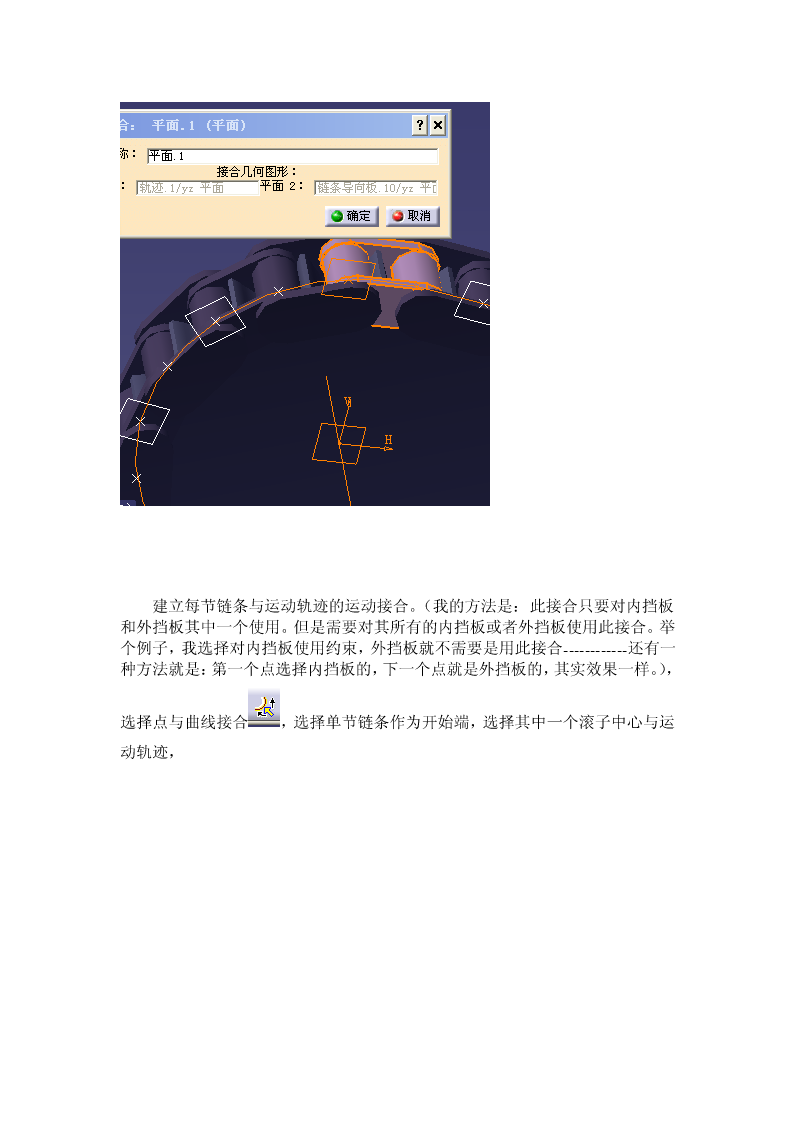
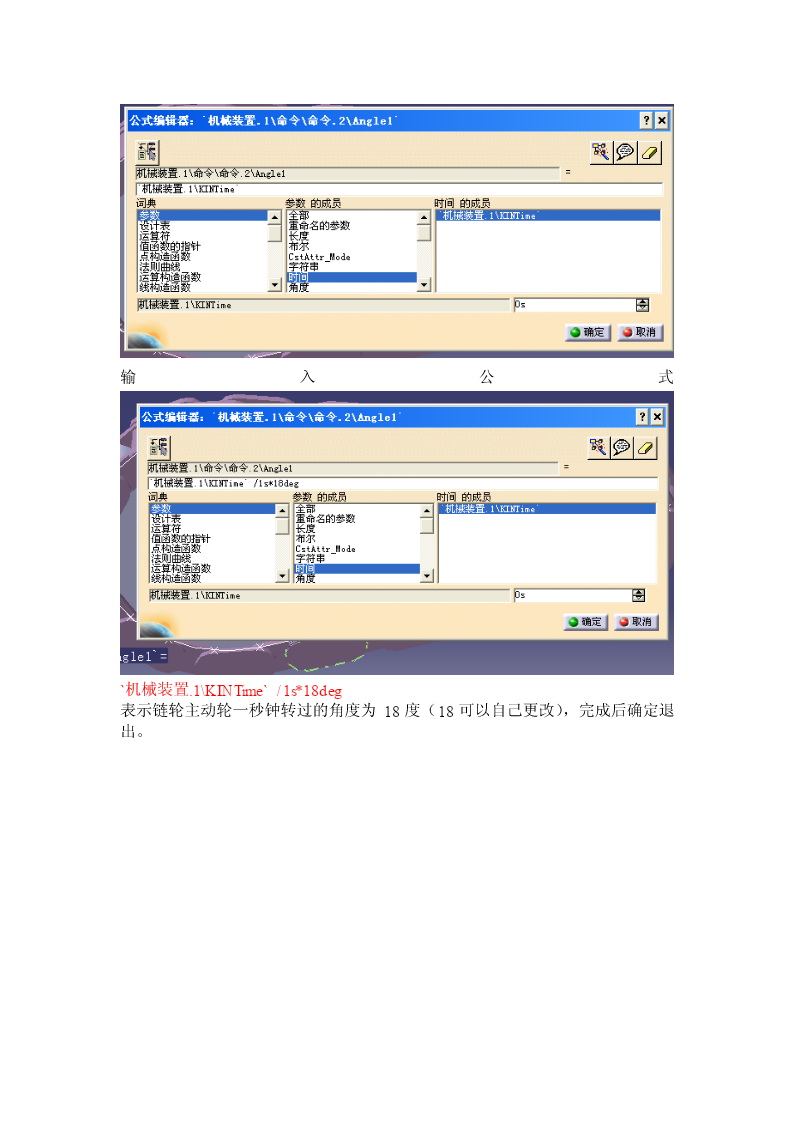
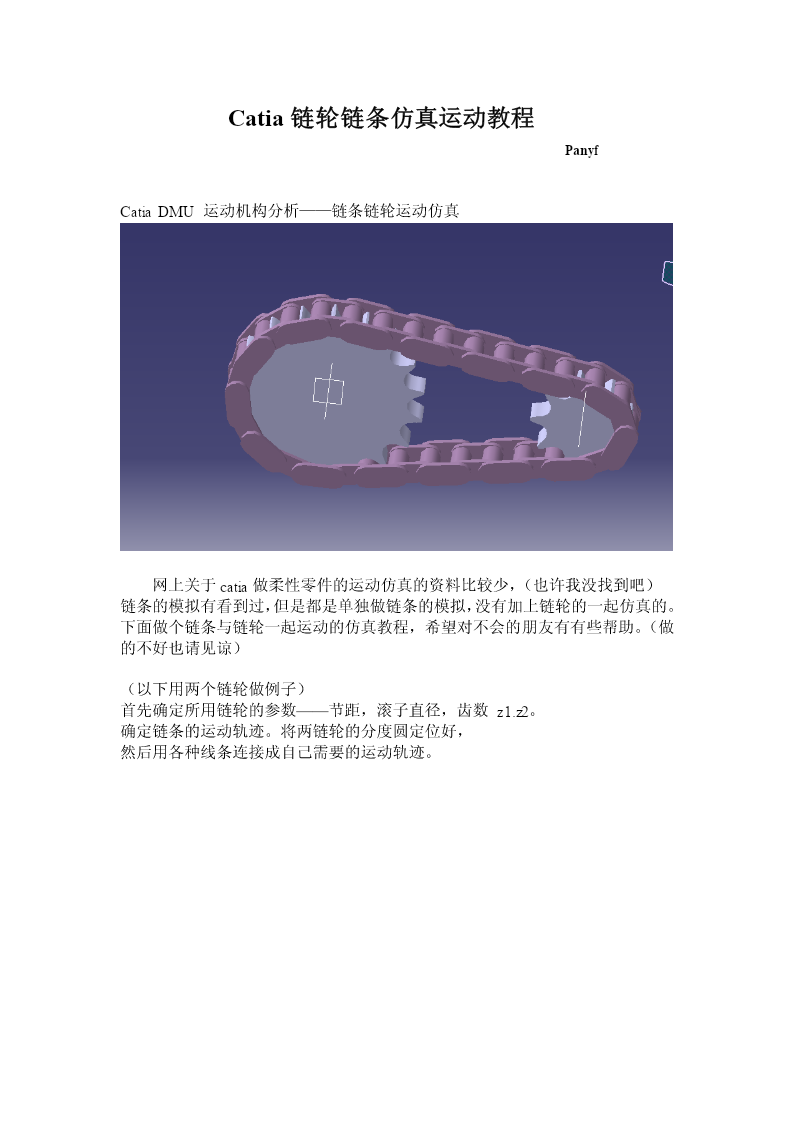
Catia链轮链条仿真运动教程PanyfCatiaDMU运动机构分析——链条链轮运动仿真网上关于catia做柔性零件的运动仿真的资料比较少,(也许我没找到吧)链条的模拟有看到过,但是都是单独做链条的模拟,没有加上链轮的一起仿真的。下面做个链条与链轮一起运动的仿真教程,希望对不会的朋友有有些帮助。(做的不好也请见谅)(以下用两个链轮做例子)首先确定所用链轮的参数——节距,滚子直径,齿数z1.z2。确定链条的运动轨迹。将两链轮的分度圆定位好,然后用各种线条连接成自己需要的运动轨迹。1、如果只需要几节链条的模拟

CATIA-DMU-运动机构仿真教程.ppt
CATIADMU运动机构仿真教程234567大家有疑问的,可以询问和交流91011121314151617181920212223242526272829303132333435363738394041424344454647484950515253545556575859606162

链条用链轮.pdf
本发明目的在于提供如下的链条用链轮:通过将链轮的齿形以及齿形节距角最优化,来降低链条与链轮的齿啮合时产生的振动以及噪音,并且,标准链条能够顺滑地从链轮啮出,并且,制造容易且能够降低摩擦声音。在链条用链轮(11)中,具有大小不同的至少2种齿形节距角的多个齿不规则地排列,多个齿的齿形形成为其齿根圆直径或者齿根距离比标准链轮的齿根圆直径或者齿根距离大,并且链轮整体(11)通过烧结成形为一体。
链条用链轮.pdf
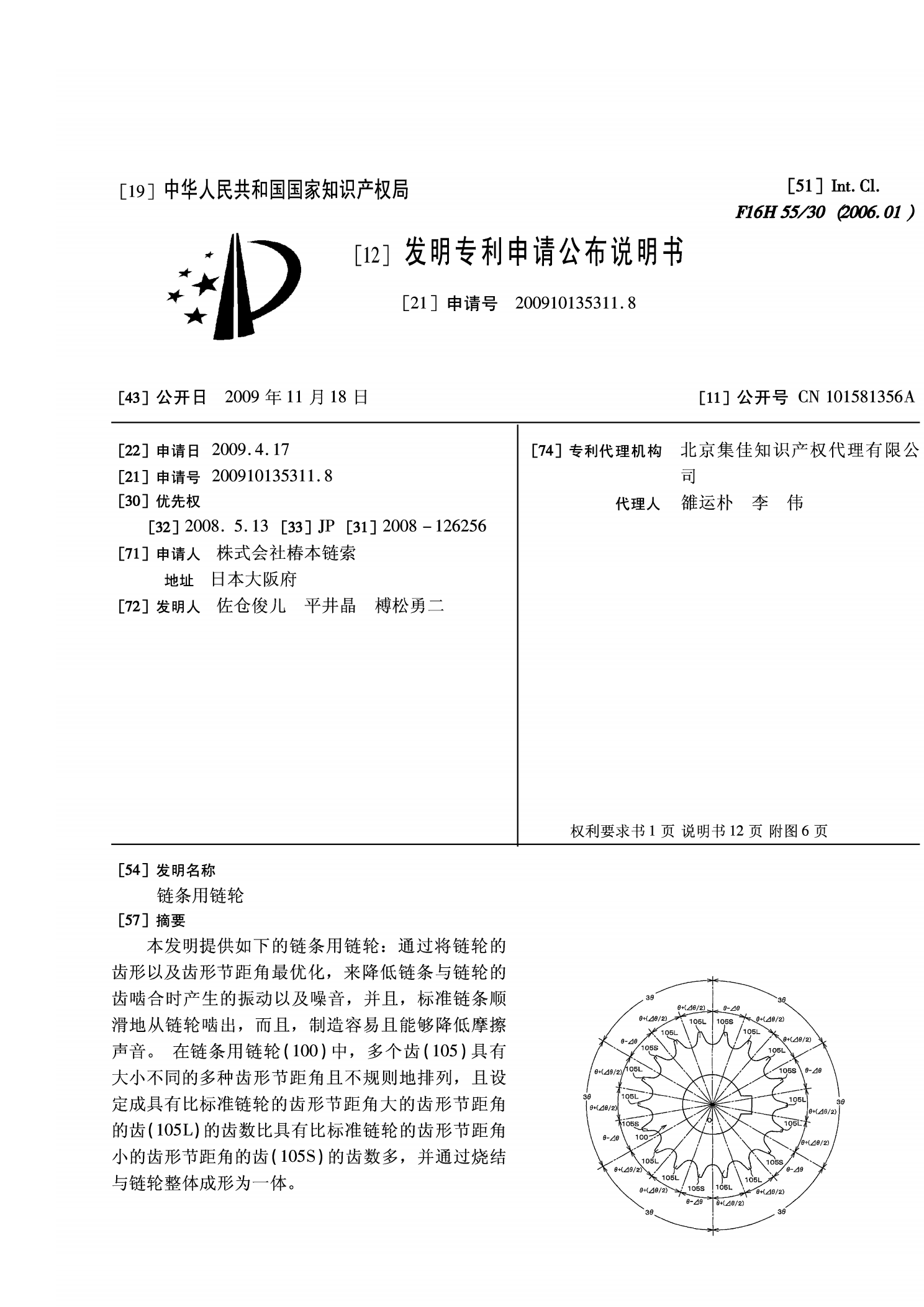
本发明提供如下的链条用链轮:通过将链轮的齿形以及齿形节距角最优化,来降低链条与链轮的齿啮合时产生的振动以及噪音,并且,标准链条顺滑地从链轮啮出,而且,制造容易且能够降低摩擦声音。在链条用链轮(100)中,多个齿(105)具有大小不同的多种齿形节距角且不规则地排列,且设定成具有比标准链轮的齿形节距角大的齿形节距角的齿(105L)的齿数比具有比标准链轮的齿形节距角小的齿形节距角的齿(105S)的齿数多,并通过烧结与链轮整体成形为一体。

链条用链轮.pdf
本发明提供一种通过链轮的齿形和齿形节距角的最佳化,降低链条与链轮齿啮合时产生的振动和噪音,并且标准链条与链轮的啮合分离平滑的链条用链轮。在链条用链轮(100)中,上述多个齿(105)具有尺寸不同的多各种齿形节距角,具有上述多种齿形节距角的齿不规则地排列,并且设置为具有比标准链轮的齿形节距角大的齿形节距角的齿(105L)的齿数,比具有比标准链轮的齿形节距角小的齿形节距角的齿(105S)的齿数多。