
基于共享子空间多视角非负矩阵分解的工业故障检测方法.pdf

子璇****君淑


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于共享子空间多视角非负矩阵分解的工业故障检测方法.pdf
本发明涉及故障监测与诊断技术领域,提供一种基于共享子空间多视角非负矩阵分解的工业故障检测方法,首先使用多个摄像头对电熔镁炉的炉面图像数据进行采集,通过灰度化、归一化处理后,得到各视角的炉面图像矩阵;然后,采用非负矩阵分解方法建立并训练炉面图像矩阵在低维空间的目标函数模型;接着,通过各视角的公共映射矩阵及公共投影矩阵对验证样本的炉面图像矩阵进行降维,并计算各视角的低维表示矩阵与公共特征矩阵的差异性,通过核密度估计得到各视角的99%控制线值;最后,实时采集与处理炉面图像数据,比较待测样本中各视角的差异性与99
基于流形的非负矩阵分解电熔氧化镁工业故障检测方法.pdf
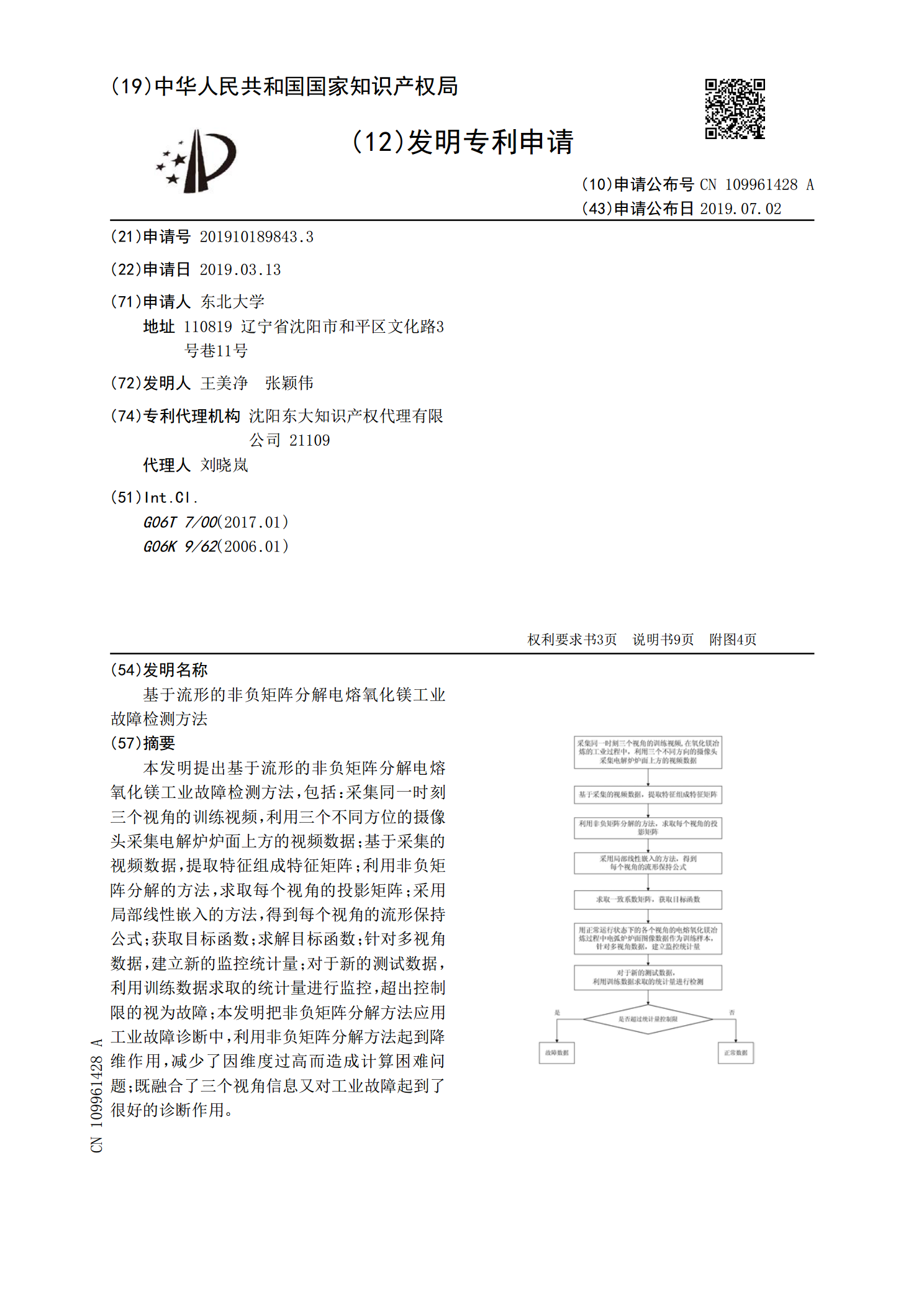
本发明提出基于流形的非负矩阵分解电熔氧化镁工业故障检测方法,包括:采集同一时刻三个视角的训练视频,利用三个不同方位的摄像头采集电解炉炉面上方的视频数据;基于采集的视频数据,提取特征组成特征矩阵;利用非负矩阵分解的方法,求取每个视角的投影矩阵;采用局部线性嵌入的方法,得到每个视角的流形保持公式;获取目标函数;求解目标函数;针对多视角数据,建立新的监控统计量;对于新的测试数据,利用训练数据求取的统计量进行监控,超出控制限的视为故障;本发明把非负矩阵分解方法应用工业故障诊断中,利用非负矩阵分解方法起到降维作用,

基于多视角非负矩阵分解的同名区分算法研究.docx
基于多视角非负矩阵分解的同名区分算法研究摘要:同名区分是一种重要的数据挖掘技术,它可以准确地从大规模数据中识别出同名实体。本文提出了一种基于多视角非负矩阵分解的同名区分算法。该算法结合了多源数据的特点,同时运用非负矩阵分解的思想,通过对原始数据进行分解,提取不同视角下的特征信息,从而有效地识别出同名实体,并给出了实验结果。本算法具有较高的准确率和效率,可应用于各种领域的数据挖掘和信息处理领域。关键词:同名区分,多视角,非负矩阵分解,数据挖掘一、引言随着互联网的普及,人们所能获取到的信息数据量急剧增加,同时

子空间约束下的非负矩阵分解算法研究.docx
子空间约束下的非负矩阵分解算法研究子空间约束下的非负矩阵分解算法研究摘要:非负矩阵分解(Non-negativeMatrixFactorization,NMF)是一种常用的数据降维和模式识别方法。近年来,研究者们发现,通过引入子空间约束,可以进一步提高NMF方法的性能。本论文旨在系统地总结和分析子空间约束下的非负矩阵分解算法,并研究其在不同领域的应用。1.引言非负矩阵分解(NMF)是一种用于矩阵数据分析的重要方法。它可以将一个非负矩阵分解为两个非负矩阵的乘积,从而达到数据降维和模式识别的目的。然而,传统的

基于双约束非负矩阵分解的多视角聚类的开题报告.docx
基于双约束非负矩阵分解的多视角聚类的开题报告一、研究背景目前,大量的数据都是通过不同的视角来获取的。因此,如何利用这些来自不同视角的数据进行聚类成为了研究的热点。传统的聚类方法往往只基于单个视角的数据,难以充分发挥多视角数据的信息。多视角聚类,则是一种目前被广泛研究的新型聚类思想,其核心思想是综合不同视角的数据特征,从而提高聚类结果的准确性和稳定性。多视角聚类已被证明在许多领域中取得了显著的效果,如图像处理、生物信息学和社交网络等领域。另外,非负矩阵分解(Non-negativeMatrixFactori